全液压自动猫道举升系统运动学分析
2015-08-05 06:18:08谭志松张春鹏李艳娇
石油矿场机械 2015年7期
谭志松,于 萍,张春鹏,李艳娇
(吉林大学机械科学与工程学院,长春130022)①
全液压自动猫道举升系统运动学分析
谭志松,于萍,张春鹏,李艳娇
(吉林大学机械科学与工程学院,长春130022)①
全液压自动猫道举升系统在举升钻具过程中要充分保证其运行的平稳性,以降低冲击载荷和整个举升滑道的振动。根据全液压自动猫道模型,将举升系统进行简化,建立其机构运动简图;应用MATLAB软件求解运动学方程并进行线性拟合,得到举升滑道的空间位姿变化曲线;应用Ad-ams软件对举升系统进行运动学分析,得到举升滑道倾角变化曲线、位移曲线和速度曲线,验证了其设计的可行性。
举升系统;空间位姿;运动学分析;平稳性;可行性
全液压自动猫道分为钻具运移系统、举升系统、提升系统3大部分。其中钻具运移系统主要将钻具运移到全液压自动猫道平台上;举升系统主要是实现钻具从钻具运移系统到井口指定位置之间的输送或反向输送;提升系统是猫道在钻具运移过程中的动力装置,驱动承载钻具的举升滑道沿着坡道运行。全液压自动猫道结构如图1所示。
国外已经具有较为先进的钻具处理系统,可实现钻具从地面到钻台面之间的输送或反向输送,已有大量学者对其进行研究[1-3]。近年来,国内关于猫道的研究也有了快速发展[4-6],但是有关猫道的文献中对举升系统主要研究其结构和功能,对其运动学的研究较少,对猫道运动周期中举升系统的平稳性的研究更少。本文根据全液压自动猫道模型,将举升系统进行简化,建立其机构运动简图;应用MAT-LAB、Adams软件进行运动学仿真,对举升系统的空间位姿和机构运行的平稳性进行了分析。
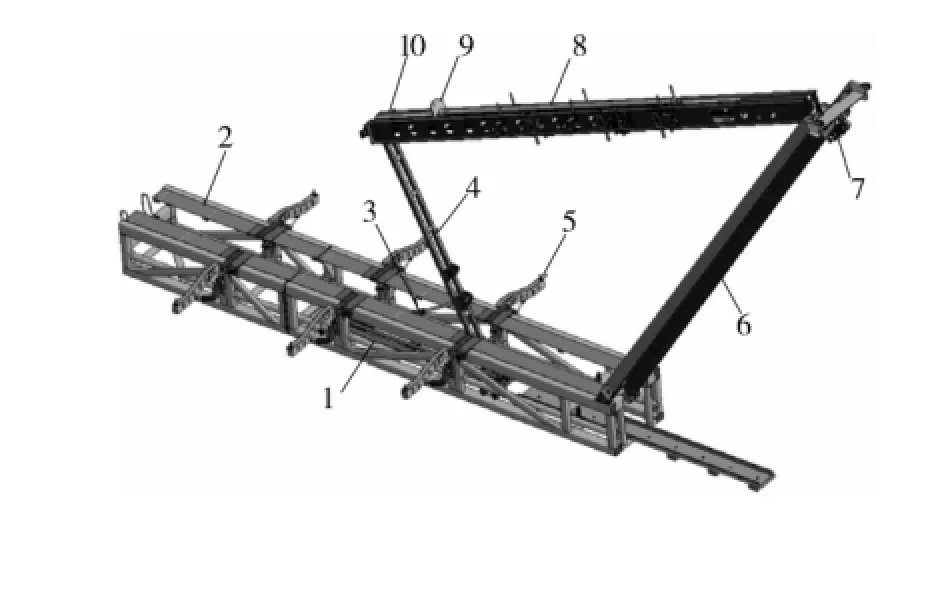
图1 全液压自动猫道结构
1—平台浮动滑车;2—钻杆平台;3—撑杆液压缸;4—撑杆机构;5—钻杆支架;6—坡道;7—提升系统;8—钻具;9—推送机构;10—举升滑道。
1 举升系统结构组成
举升系统的主要作用是:将钻具运移系统输运来的钻具举升到井口指定位置;钻井结束后,将钻具从井口回收至钻具运移系统[7-8]。
举升系统结构如图2所示,主要包括车架平移系统、举升滑道、撑杆机构和双作用液压缸。车架平移系统包括滑车总成及滚轮组件;举升滑道主要由滑道本体、钻具推送机构等组成;撑杆机构设置了2个连接位置,可以适用不同尺寸的钻机需求。
当向钻机上输运钻具时,钻杆盒的钻具通过钻具运移系统输运到举升系统,然后举升系统将钻具举升到井口指定位置,等待吊卡夹持钻具;相反,待甩杆时,需要通过液压吊卡将钻具放置在举升系统上,举升系统携带钻具回落至地面,直至将钻具送入钻杆盒中。自始至终,举升系统在整个猫道的运动周期中发挥着非常重要的作用[9]。

图2 举升系统结构
1—举升滑道;2—撑杆机构;3—双作用液压缸;4—车架平移系统。
2 举升系统运动学分析
2.1 举升系统的机构运动简图
举升系统有2个原动件,提升滑车的双液压马达和撑杆液压缸,举升动作的执行机构主要由撑杆机构、举升滑道和车架平移系统等组成。选择平台的中性平面为视图平面,将举升系统的所有机械构件等效在此平面内,系统的机构运动简图[10]可以简化为如图3所示。

图3 举升系统机构运动简图
如图3所示,杆长按照杆件的序号,分别为l1、l2、l3、l4、l5,其中l4分为l40和l41两部分。当举升滑道的上平面与平台上平面平行时,撑杆液压缸活塞杆与撑杆液压缸缸筒底的距离为L0,A点的高度为h0;提升滑车双液压马达沿着坡道将举升滑道A点提升Δx距离时,A点距离地面的高度为h1,撑杆液压缸活塞杆的伸出距离为L。举升滑道与水平方向的夹角为α,撑杆机构与车架平移系统的夹角为β,举升滑道与撑杆机构的夹角为γ,坡道与水平面的夹角为50°。
2.2 举升滑道空间位姿线性拟合
举升滑道的空间位姿可以用举升滑道倾角(即举升滑道与水平面的夹角α)表示。
对撑杆机构的杆件BD作速度分析,S是车架平移系统沿坡道方向运动的位移。撑杆机构的速度分析简图如图4所示。
铰点B的速度为
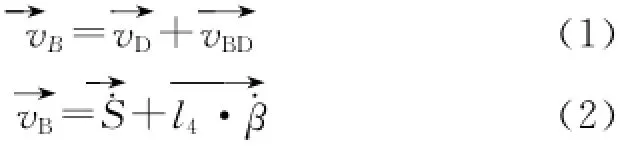
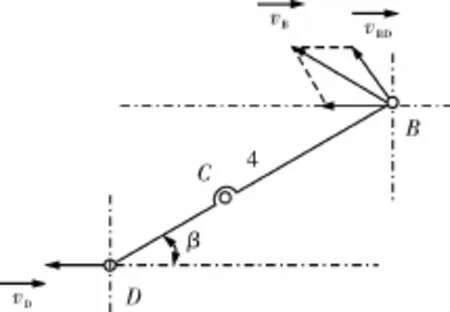
图4 撑杆机构的速度分析简图
举升滑道的速度分析简图如图5所示,铰点A的速度可以表示为

根据式(1)~(2)可将铰点A的速度进一步简化为
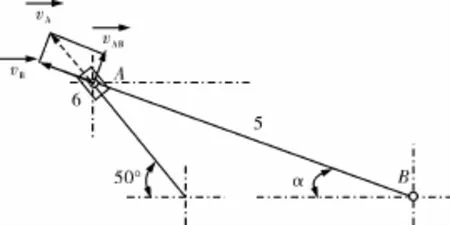
图5 举升滑道的速度分析简图
根据图5可以将铰点A的速度在x、y方向分解为

可得

式中:β为撑杆机构与车架平移系统的夹角,如图3所示,可以表示为

当提升滑车采用匀速控制(vA恒定不变),撑杆液压缸配合提升滑车的双液压马达动作,用MAT-LAB软件求解式(7),线性拟合可以得到举升滑道的空间位姿变化曲线,如图6所示。
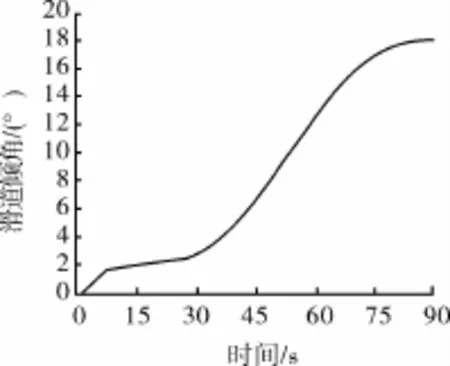
图6 举升滑道的空间位姿变化曲线
2.3 举升滑道的空间位姿仿真
用Adams软件仿真[11]时,举升滑道与水平面的夹角α不易直接测量,可以通过测量举升滑道与撑杆机构的夹角γ、撑杆机构与车架平移系统的夹角β这2个角度而得到,如图3所示。

在式(9)中γ和β与α相比是相对容易测量得到的参数。因此,需要建立2个测量点MEA_AN-GLE_1和MEA_ANGLE_2,分别对应于角度γ 与β。据建立的测量点MEA_ANGLE_1和MEA_ANGLE_2,即可得到α、β和γ的变化规律,图7为举升滑道倾角的变化曲线。

图7 举升滑道倾角的变化曲线
由图7可知:在0~8 s时,γ角度变化较快,翻转臂组件的液压缸活塞杆缩回,将举升滑道前端翻转一定的角度,因此举升滑道与撑杆机构的角度变化较大;相比而言,在翻转臂组件的液压缸活塞杆动作时,撑杆机构的液压缸活塞杆并没有动作,所以0 ~8 s时,β角不变化;随后2 s为系统调整时间,γ角与β角均保持现有值不变;进入举升阶段时,即10 ~83 s,提升滑车的双液压马达转动带动链轮沿着链条向井口匀速爬行,撑杆液压缸配合举升动作,以保证举升滑道在空间的姿态,使得举升滑道与平台的夹角平稳增加,直至接近设计要求;在最后7 s中,系统调整空间位姿,举升滑道倾角在18°范围内波动,最终在90 s时稳定在18.004 5°,符合设计要求。
2.4 举升滑道的位置仿真
以举升滑道的CM_Position点为仿真位置点,仿真时间90 s。举升滑道在同一个三维坐标下的举升位移曲线如图8所示。
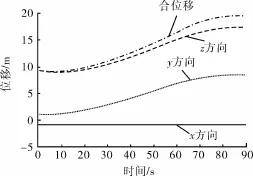
图8 举升滑道在同一三维坐标下的举升位移曲线
由图8可知:由于举升滑道只有在yz平面运动,因此x方向的位移没有变化;y方向从1038 mm变化到8 565mm,增加了7527 mm;水平z方向由9170 mm增加到17417 mm,其沿着车架平移系统向井口移动了8247mm。从曲线可以看出,位移变化平稳,在90s后到达井口位置,符合设计要求。
2.5 举升滑道的速度仿真
举升滑道向上举升时其质心的速度曲线如图9所示,可以看出:举升滑道在x方向并没有位移,因此全程速度为0;在0~8 s时,翻板机构翻转举升滑道,举升滑道在竖直y方向的速度迅速达到峰值59.31 mm/s;为了保证运动的稳定性,速度又回落至0;在水平z方向,翻转臂带动举升滑道在zy平面画了1个类弧,其速度至-42.5 mm/s后反向沿井口方向移动,其移动速度至14.5 mm/s后回归至0静止,等待举升滑道的举升;在举升前,有2 s的系统准备时间,待准备结束后,在10~28 s,举升滑道加速向上举升,在竖直y向上速度快速增加;随后在28~50s,举升滑道在y向上趋于匀速运动;在快要到达钻机平台高度时,速度慢慢地降低,直至达到预定的位置,保证了运动的平稳;在10~88 s期间,举升滑道在水平z方向是先加速后减速的运动,最大速度达到208.6 mm/s。
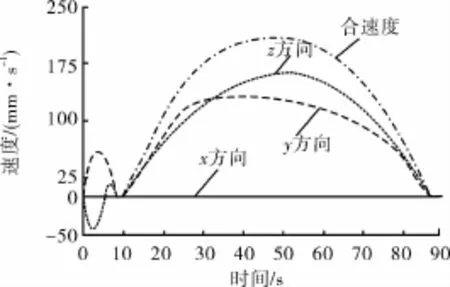
图9 举升滑道的质心运动速度曲线
举升滑道举升的速度曲线并没有突变,每段都比较平滑,给予举升滑道在空间运动时充足的调整时间,可以准确而快速地达到井口指定位置,符合当初的设计要求。
3 结论
1) 通过举升系统空间位姿调整,举升滑道与水平面的夹角α在18°附近波动,最终稳定在18°,便于吊卡夹持钻具,符合设计要求。
2) 在举升滑道位移变化曲线中,位移增量变化平稳,并在规定时间内将钻具输送到井口指定位置,达到了设计要求。
3) 举升滑道举升的速度变化比较平稳,降低了冲击载荷和整个举升滑道的振动,验证了设计的可行性。
[1] Dickinson III BWO,Dickinson RW,Nordlund R.Multiple lateral hydraulic drilling apparatus and meth-od:U.S.,6 206 112[P].2001-03-27.
[2] Qing W,Qang Z,Yun X.Evaluation for Energy Saving Effect and Simulation Research on Energy Saving of Hydraulic System in Hybrid Construction Machinery [J].Chinese Journal of Mechanical Engineering,2005 (12):31.
[3] Harris D,Peyon A.New developments in the mecha-nized running of tubular[C]//SPE/IADC Middle East drilling technology.Symposium,1999:363-371.
[4] 董树文,李廷栋,陈宣华,等.我国深部探测技术与实验研究进展综述[J].地球物理学报,2013,55(12):3884-3901.
[5] 赵淑兰,李文彪,聂永晋,等.动力猫道技术国内外现状和发展趋势[J].石油矿场机械,2010,39(2):13-15.
[6] 牛文杰.陆地钻机钻具自动运移装置研制[J].重型机械,2012(6):9-12.
[7] 张春鹏,孙友宏,王清岩,等.全液压钻具自动出槽装置:中国,201220734054.7[P].2013-07-10.
[8] 孙友宏,吕兰,于萍,等.深井钻机全液压自动钻具输运装置:中国,201210482688.2[P].2014-07-16.
[9] 张伟,任建庭,高冬东.石油钻机自动送钻监控技术的现状与发展趋势[J].石油机械,2010(5):87-91.
[10] 哈尔滨工业大学理论力学教研室.理论力学I[M].北京:高等教育出版社,2002.
[11] 郑建荣.ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2002.
Kinematics Analysis of Lifting System of Full Hydraulic Automatic Catwalk
TAN Zhisong,YU Ping,ZHANG Chunpeng,LI Yanjiao
(College of Mechanical Science and Engineering,Jilin University,Changchun 130022,China)
In the process of lifting drilling tools,it is very important to ensure the stability of oper-ation of the lifting system of full hydraulic automatic catwalks,in order to reduce the impact load and the oscillation of lifting ramp.According to the full hydraulic automatic catwalks model,the lifting system is simplified,and its mechanismmotion diagram is established.Using MATLAB software to solve the kinematics equation and get space posture change curve of lifting ramp by linear fitting,kinematics analysis was executed on the lifting system by using the Adams soft-ware,and the curves of lifting ramp angle and displacement curve and speed curve were obtained,and the feasibility of the design was verified.
lifting system;space posture;kinematics analysis;stability;feasibilit y
TE924
A
10.3969/j.issn.1001-3482.2015.07.006
1001-3482(2015)07-0024-05
①2015-01-15
国家深部探测技术与实验研究专项资助项目(Sino Probe-09-05)
谭志松(1989-),男,湖北巴东人,硕士研究生,主要从事工程机械与石油机械研究,E-mail:13104306967@163.com。
猜你喜欢
铁道车辆(2022年1期)2022-03-09 01:56:42
机械设计与制造工程(2021年3期)2021-04-16 13:06:54
科学技术创新(2020年31期)2020-10-30 05:49:10
西南石油大学学报(自然科学版)(2019年2期)2019-04-25 13:08:46
光学精密工程(2016年5期)2016-11-07 09:05:55
光学精密工程(2016年4期)2016-11-07 09:05:11
湖北工业大学学报(2016年5期)2016-02-27 13:14:48
筑路机械与施工机械化(2015年11期)2015-07-01 16:28:45
护理研究(2015年5期)2015-05-10 01:47:54
筑路机械与施工机械化(2014年5期)2014-03-01 02:59:38