
二自由度门式起重机智能定位防摆控制研究
2015-08-01 07:07郑飞杰晋芳伟郑亚青邱丽梅王春荣
武夷学院学报 2015年12期
关键词:仿真
郑飞杰,晋芳伟,吴 龙,郑亚青,邱丽梅,王春荣
(1.三明学院 机电工程学院,福建 三明 365004;2.机械现代设计制造技术福建省高校工程研究中心,福建 三明 365000;3.华侨大学 机电及自动化学院,福建 厦门 361021)
二自由度门式起重机智能定位防摆控制研究
郑飞杰1,2,晋芳伟1,2,吴龙1,2,郑亚青3,邱丽梅1,2,王春荣1,2
(1.三明学院 机电工程学院,福建 三明 365004;2.机械现代设计制造技术福建省高校工程研究中心,福建 三明 365000;3.华侨大学机电及自动化学院,福建 厦门 361021)
摘要:为了实现二自由度门式起重机小车精确定位和有效控制吊载摆动,提高门式起重机的工作效率,很多学者对防摆控制方法做了大量研究。利用拉格朗日方程建立动力学模型的非线性微分方程,提出了几种控制策略,设计了几种控制器,并在MATLAB/Simu1ink环境中进行仿真。通过仿真结果比较,分析哪种控制器响应速度快,控制过程较平稳,稳态精度更高。
关键词:二自由度;门式起重机;模糊PID控制器;MATLAB/Simu1ink;仿真
随着工业化在21世纪的逐渐深入,门式起重机作为一种重要的运输机械,在船运吊装、厂房设备吊运、水电站、火车车厢运输安装等方面得到广泛应用[1]。起重机在运输过程中,由于小车与吊载之间采用钢丝绳连接,在有外界干扰(风力、小车加减速等)时极易产生晃动[2]。不仅会降低吊运系统的定位精度和稳定性,还会影响工作效率,甚至会引发安全事故。本文基于以往经典控制方法的大量研究[3-4],设计了PID控制器和模糊控制器,并在MATLAB中建立仿真框图,对二自由度门式起重机作定位防摆控制仿真分析,通过结果比较,体现每种控制器自身的特点和能实现的控制效果,择优选用[5]。
1 二自由度门式起重机定位防摆控制系统建模
为了二自由度门式起重机能同时控制小车停在指定位置、绳长伸缩到要求距离,还有抑制吊载摆角在要求范围内,实现控制目的,本文由吊运系统的物理模型分析建立了对应的数学模型,以此来研究影响吊载摆动的因素[6]。二自由度门式起重机吊运系统模型如图1所示。
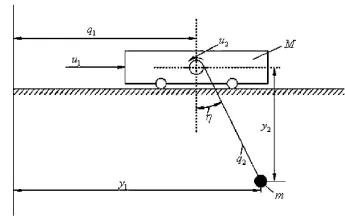
图1 二自由度门式起重机器人吊运系统模型
利用分析力学中的拉格朗日方程建立的二自由度门式起重机吊运系统的非线性动力学微分方程如下[5,7]:

本文起重机控制分析选取小车位置q1和绳长q2为输入参数,设定一定参考期望值,结合式(1)有:
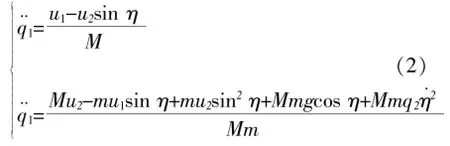
上式所列即为吊运系统的数学模型,其中将摆角当作系统本身内部的一个变量,其数学方程为:

2 二自由度门式起重机系统仿真与分析
在没有任何专门设计的控制器添加进去的情况下,对二自由度门式起重机本身系统进行测试,验证其各项特性,为后续控制策略的提出做好数据准备。如图2所示,建立仿真模型。
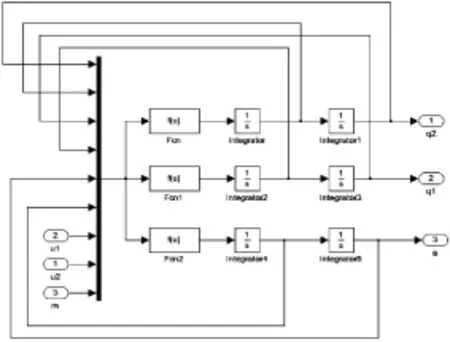
图2 二自由度门式起重机系统仿真模型
如上图所示,输入变化量为u1、u2、m三个参数,为简单验证系统的特性,模型中给定u1,u2分别一个阶跃,取一个绳长初始值和吊载质量m值。仿真结果:小车位置变化、钢绳长度变化和吊载摆角变化曲线图如图3所示。


图3 二自由度门式起重机系统仿真结果
分析图3所示结果,作为没有任何外加控制器的开环式系统,在输入激励的作用下,出现振荡、持续变化的状态,无法实现预期的要求,稳定性差。
3 PID控制器的设计与仿真
常规PID控制器按控制性质来分是属于线性控制器[8],其控制偏差是由给定值r(t)与实际输出值y(t)之差所得:
e(t)=r(t)-y(t)(4)
其调节原理:通过比例(P)、积分(I)、微分(D)来对偏差e(t)进行计算,由线性组合来得到输出控制量u(t)。根据这个原理来控制被控对象,即设定Kp、KI和KD的值。
PID控制器的控制效果取决于参数KD,KI,KD的整定好坏。本文采用稳定边界法(Z-N)进行整定,依表1整定PID的三个参数值。

表1 Z-N参数整定计算公式
如图4所示,建立二自由度门式起重机PID控制系统仿真框图。外环控制小车位置和绳长大小;内环控制吊重摆角,以反馈摆角信号来抑制吊重摆动。
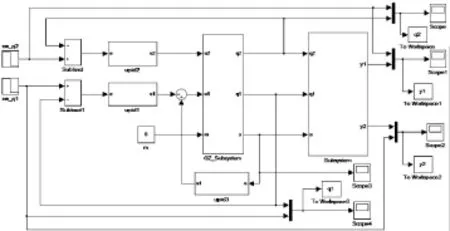
图4 起重机器人系统常规PID控制仿真图
在MATLAB/Simu1ink中建模仿真,结果如图5所示:小车位置和绳长,还有吊载摆角的变化曲线图。
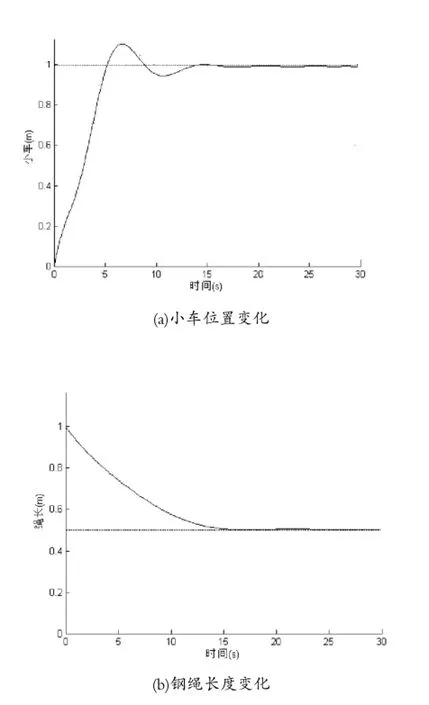

图5 常规PID控制仿真结果
由图5所示可知,小车在15 s左右达到目标值稳定;钢绳长度在15 s左右收缩到指定长度。明显,在设计添加了PID控制器后,系统控制效果得到改善,虽然调整时间有点长,超调量也比较大,整体不够理想,但小车位置和绳长实现可控,吊载摆动也得到有效抑制。
4 模糊控制器的设计与仿真
本文所研究的对象二自由度门式起重机,其系统是非线性的,而作为线性控制器的PID控制器是很难满足它的控制要求的,所以设计了另一种控制器——模糊控制器,它是属于一种非线性控制器,为非线性系统的控制开辟了新的方向[9]。
模糊控制器主要包括模糊规则、模糊化、模糊推理、解模糊化和输入输出量化等部分[10]。二自由度门式起重机系统定位防摆采用模糊控制,主要是依据操作者的实战经验和专家库知识建立控制规则,本文采用三个模糊控制器进行控制,即把q1和、q2和、η和分开控制,一个模糊控制器中用两个输入变量,即为二维的控制器,规则数就变少了,其中小车位置模糊控制规则如表2所示。
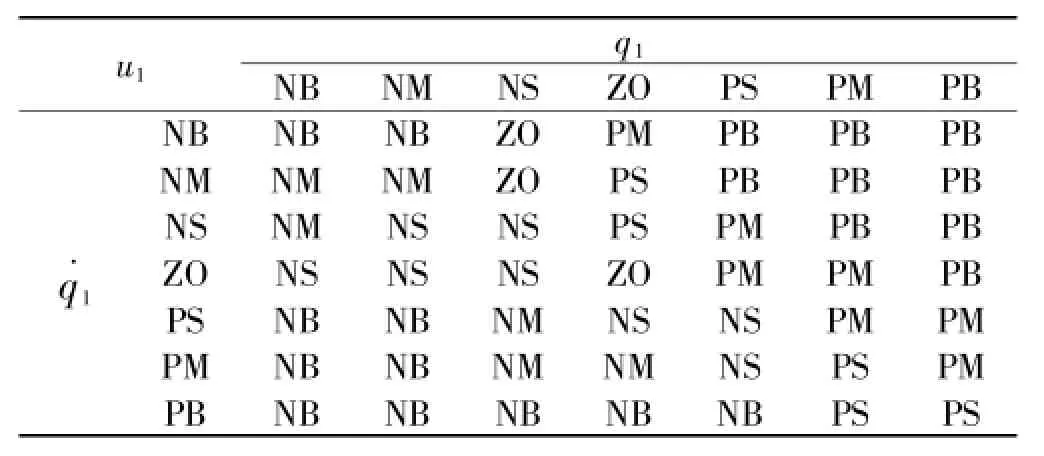
表2 小车位置模糊控制规则表
在PID控制器的基础上,把系统中PID控制模块置换成模糊控制器,同时在特定位置设置添加比例因子和量化因子[5]。在MATLAB/Simu1ink环境中建模仿真,得小车位置、绳长、摆角的变化仿真曲线,如图6所示。

图6模糊控制系统仿真结果
由上图仿真结果分析,模糊控制在10 s左右使小车位置、绳长运行到预期给定值,吊载摆动得到抑制效果也很明显,接近预期要求,且速度快。整体调整时间实质性的缩短,超调量控制越趋理想,系统控制平稳。
5 结束语
通过对二自由度门式起重机系统进行了定位防摆控制研究,针对起重机本身开环式控制系统存在的缺陷,设计了PID控制器和模糊控制器,并采用仿真软件MATLAB/Simu1ink进行控制仿真分析。结果表明,模糊控制比PID控制响应速度快,而且起重机定位防摆系统可以在较小的位置超调下使小车迅速到达预期位置,同时迅速抑制吊载摆动,所以从某种方面讲,模糊控制大大提高了系统的控制性能。这也为后续模糊自适应PID控制器的设计和应用分析奠定了基础。
参考文献:
[1]高武龙,陈志梅,孟文俊.桥式起重机防摆控制方法综述[J].起重运输机械,2014(5):1-5.
[2]Kha1id L S,Wi11iam S,Stephen D.A contro11er enab1ing precise positioning and sway reduction in bridge and gantry cranes[J].Contro1 Engineering Practice,2007(15):825-837.
[3]蒋理,陈树广.基于模糊控制的桥式起重机定位防摆研究[J].计算机仿真,2009,26(6):179-182.
[4]陈兵伟,廖卫强.应用变论域模糊PID的直流电机调速系统[J].集美大学学报(自然科学版),2011,5(3):207-211.
[5]郑飞杰.基于模糊PID的2自由度门式起重机器人轨迹跟踪控制研究[D].厦门:华侨大学,2013.
[6]胡艳丽,刘团结,季学斌,等.基于模糊的的桥式起重机智能防摆控制研究[J].数字技术与应用,2014(7):22-24.
[7]胡宗武.工程振动分析基础 [M].上海:上海交通大学出版社,1985.
[8]刘金琨.先进PID控制MATLAB仿真[M].北京:电子工业出版社,2011.
[9]李庆等.双闭环直流调速系统的自适应模糊PID控制[J].学术论文,2009(6):61-64.
[10] 胡艳丽.基于模糊PID的桥式起重机防摆控制研究[D].河南:河南理工大学,2010.
(责任编辑:叶丽娜)
中图分类号:TH213.5
文献标识码:A
文章编号:1674-2109(2015)12-0069-05
收稿日期:2015-07-09
基金项目:福建省教育厅科技项目(JB14094);三明学院科研基金自然科学研究项目 (B201309/Q);福建省教育厅“卓越计划”试点项目(SD1109)。
作者简介:郑飞杰(1987-),男,汉族,助教,主要从事机器人技术、机械设计研究。
Investigation of Intelligent Positioning and Anti-sway Control of Two-Degree-of-Freedom Gantry Crane
ZHENG Feijie1,2,JIN Fangwei1,2,WU Long1,2,ZHENG Yaqing3, QIU Limei1,2,WANG Chunrong1,2
(1.Schoo1 of Mechanica1&E1ectronic Engineering,Sanming University,Sanming,Fujian,365004;
2.FujianCo11egeEngineeringResearchCenterofModernDesignandManufacturingTechno1ogy,Sanming,Fujian,365000; 3.Schoo1 of Mechanica1 Engineering and Automation,Huaqiao University,Xiamen,Fujian,361021.)
Abstract:In order to precise1y position the tro11ey and prompt1y contro1 1oad swing of?the two degree of freedom gantry crane,further to improve the efficiency of gantry cranes,many scho1ars have done a 1ot of studies for anti-swing contro1 methods.This paper uses the Lagrange equation to estab1ish non1inear differentia1 equation of dynamics mode1,recommends severa1 contro1 schemes and designs severa1 contro11ers,and simu1ates in MATLAB/Simu1ink environment.Through the simu1ation resu1ts,ana1yzed what kind of method has fast response,high steady-state accuracy and the contro1 process is more stab1e.
Key words:two-degree-of-freedom;gantry crane robot;fuzzy PID contro1;MATLAB/Simu1ink;Simu1ation
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技资讯(2016年18期)2016-11-15
科技资讯(2016年18期)2016-11-15
价值工程(2016年29期)2016-11-14
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
企业导报(2016年6期)2016-04-21
