
流体冲击力干扰检测方法研究
2015-07-24 19:01吴刚姚文
微型电脑应用 2015年7期
吴刚,姚文
流体冲击力干扰检测方法研究
吴刚,姚文
简要分析在流体动态称重系统中存在的干扰,针对其中影响最大的流体冲击力干扰,提出基于流体冲击力动量模型的估计方法,实现对流体冲击力干扰的辨识,并设计相应的滤波算法,实现对流体冲击力干扰的滤除。仿真结果表明,该方法能有效辨识流体冲击力干扰并进行滤波,动态称重系统测量数据满足精度要求。
流体动态称重系统;流体冲击力干扰;冲击力动量模型;滤波
0 引言
在油漆配料称重系统中,主要任务是实现多批次物料的称重,常常需要精度高且称重过程快的系统。现在广泛使用的流体称重设备有流量计或齿轮泵,当精度要求比较高时,这类设备往往达不到预期的效果,并且流体粘性与流量也会对称重系统产生一定的影响。
在固体动态称重系统中,为了提高动态称重系统的精度与效率,很多学者在此做了大量研究并引入了一些先进的控制技术。如陈宝远针对称重速度和定量称重误差两者之间相互矛盾的问题,采用预测控制算法,提出了多级给料系统中的控制算法[1];顾伟针对称重系统中大块物的冲击干扰,提出估算的方法,以此来消除大块物干扰[2];白瑞林等基于多元复合控制思想,采取分段控制并引入模糊神经网络控制技术,采取给料门和传送带两个自由度协调等[3]。
以上方法针对流体系统并不完全适用,需要考虑新的影响因素。本文针对油漆配料称重系统进行分析,确定主要干扰为流体冲击力,提出基于流体冲击力动量模型的估计方法,实现对流体冲击力干扰的辨识,并设计相应的滤波算法,实现对流体冲击力干扰的滤除。
1 流体冲击对称重系统影响
在油漆配料称重系统中的结构,如图1所示:
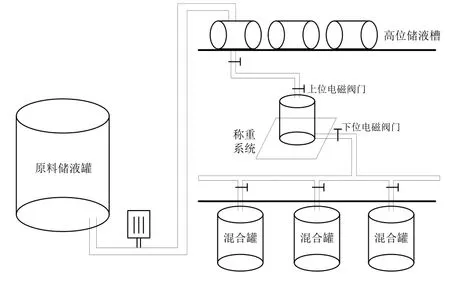
图1 油漆配料称重系统
物料是从高位储液槽经由管道流入称重系统的储液罐中的,通过控制管道上的上位电磁阀门来实现物料流动与停止,当称重系统检测到流入储液罐中的物料达到所需重量时,随即关闭上位电磁阀门,并打开下位电磁阀门,将物料输送至对应混合罐中。当所需的不同物料均完成称重后,即完成了一个批次的称重任务。
由以上工艺可以分析,影响流体动态称重的主要干扰因素有测量滞后带来的误差、管道残留量、流体下落冲击力以及由于粘度产生的滴落。
1.1 影响称重系统的干扰分析
测量滞后带来的误差以及管道残留量可以通过改进管道工艺而尽可能消除,另外将上位电磁阀门尽可能靠近管道出料口处安装也能减小以上误差[4]。
由于物料为具有一定粘性的流体,其表面会存在很大的张力与吸附力,在管道出料口处会形成滴落状态,再者管道出料口至称重系统储液罐底部也有一定高度,因此,物料在下降过程中会对称重系统产生一个不连续且变化的冲击力,这会对称重系统带来很大的冲击力干扰,在动态称重过程中影响称重系统的精度。
1.2 对流体冲击力检测的基本过程

假设前一次即第 次的测量值中已经消除了下落流体的冲击力 ,则下落流体重量估计值为公式(2):




为了消除下落流体冲击力干扰,关键在于快速实时求解下落流体的冲击力从而在检测值中自动滤除这种干扰,获得准确的下落流体累计重量的检测值。
2 流体冲击力估计方法
2.1 冲击力的动量模型

其中, 是下落流体下落到称重系统储液罐底部时的速度,设 为管道出料口至称重系统储液罐底部的高度,则为衰减时间常数,与下落流体重量成正比为衰减系数。由指数衰减规律可知,在时间冲击力已衰减了 95%,此时可忽略冲击力的干扰作用。
在流体不断流入称重系统储液罐过程中,下落流体会呈现不连续的滴落状态。因此,假设在称重系统的采样间隔个下落流体的滴落,重量为此处简化分析,可认为下落流体滴落等时间间隔下落到称重系统储液罐底部则在每段内将有一个下落流体滴落落下。


引入变量冲击力动态因子 ,表示为公式(9):


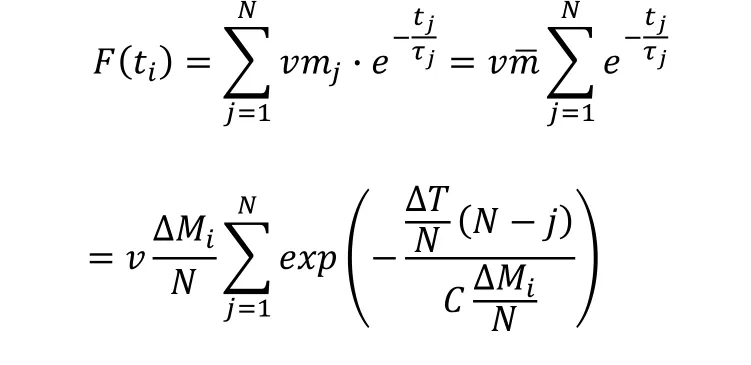
因此,式(8)中的下落流体落在称重系统储液罐底部时的冲击力表达式可简化为为公式(11):

采样时间 由称重系统决定,在时间确定后,即可以通过实验的方式得到下落流体滴落在实际的系统中会有差异。根据构造的下落流体冲击力干扰模型,只要能够就可以计算出 时刻下落流体冲击力 的数值。在称重系统的实际测量值中减去 ,即可消除称重系统中下落流体的冲击力干扰。
2.2 冲击力的逼近估计

由式(10)(11)和(12)分析可知,在已知某一个确定的通过求解方程可计算得到一个此处最大的问题在于式(12)所给出的方程很难求解,无法通过简单的算法计算得到。此处引入一种基于迭代的逼近估计方法,设定逼近估计迭代初始值,通过比较每次迭代后值即可判断是否完成逼近估计。
根据式(10)(11)和(12),建立逼近估计的迭代方程组,第 次迭代逼近估计的结果为公式(13):
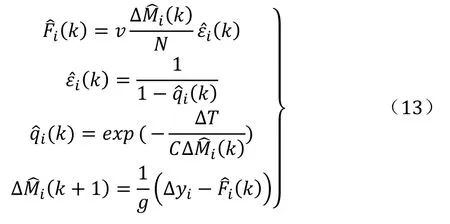
以相邻两次迭代结果 与 的误差作为判断。选取精度误差 ,当公式(14):

此时迭代完毕。
2.3 逼近估计的算法改进
公式(13)的逼近估计方程组构建了一个自回归逼近迭代。在理论上,当保持 , 时,即满足条件公式(15):

时,式(13)将一致收敛于真值[5]。
由式(13)与式(14)可知,为了得到精确的逼近估计结果, 越小越好,但相应的迭代次数会越多,这会增加迭代的次数,在很大程度上影响了在线解算的时间,这在流体动态称重系统中是不可容忍的。

表1 迭代实验数据
由表1中的试验数据可绘出的 逼近估计收敛曲线如图2所示:
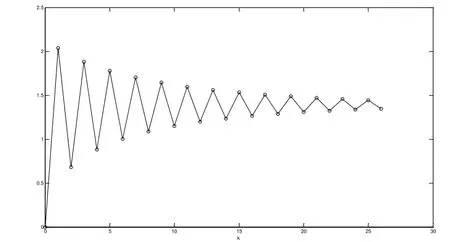
图2 逼近估计收敛曲线
逼近估计过程是一个缓慢振荡的收敛过程。需迭代运算26步才能达到的精度。
为了加快逼近估计收敛速度,此处可做一些算法上的改进,定义一步迭代残差位公式(16):



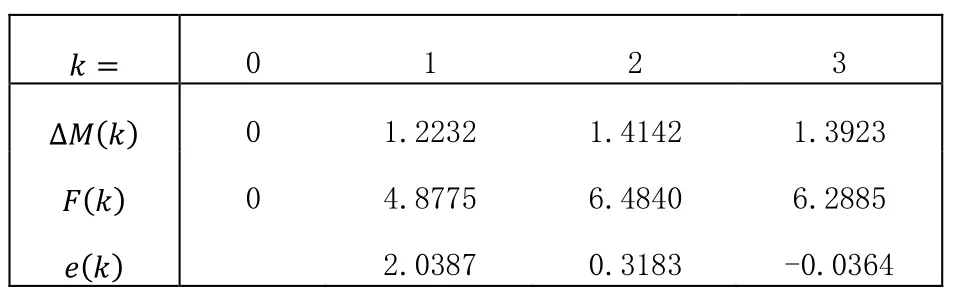
表2 自适应收敛因子迭代实验数据
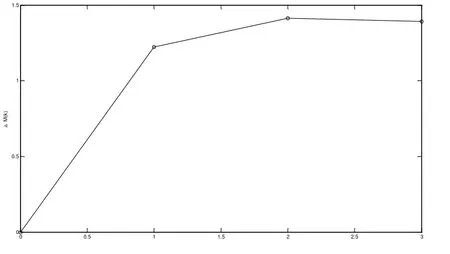
图3
3 抑制流体冲击力干扰的算法
根据式(13)(14)(16)和(17)可构造出带有滤波环节的下落流体逼近估计运算原理框图,如图4所示。

图4 带有滤波环节的逼近估计原理框图
带有滤波环节的下落流体逼近估计运算原理框图主要由3个运算环节组成:
(3)滤除下落流体冲击力干扰,并输出 和 估计值。
4 仿真与结论
根据流体动态称重系统测量数据绘制的曲线如图5所示:
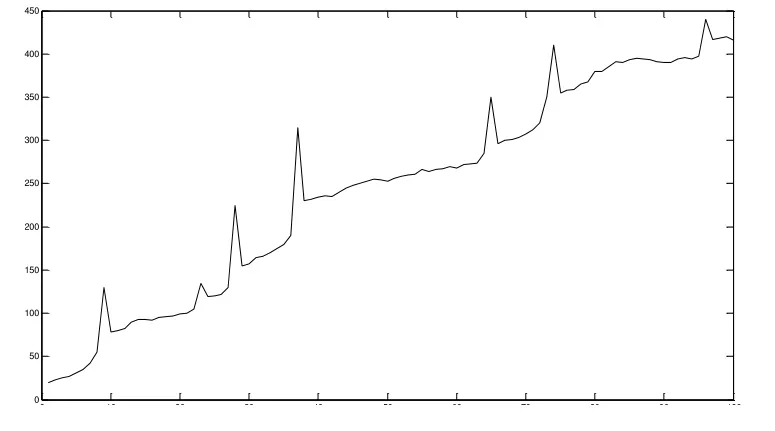
图5 流体动态称重系统数据
由曲线可以看出,该测量数据中有明显的冲击力干扰这对流体动态称重系统有很大的影响。
在Matlab中编写逼近估计迭代算法,并对以上测量数据进行滤波,可以得到实验数据曲线图如图6所示:
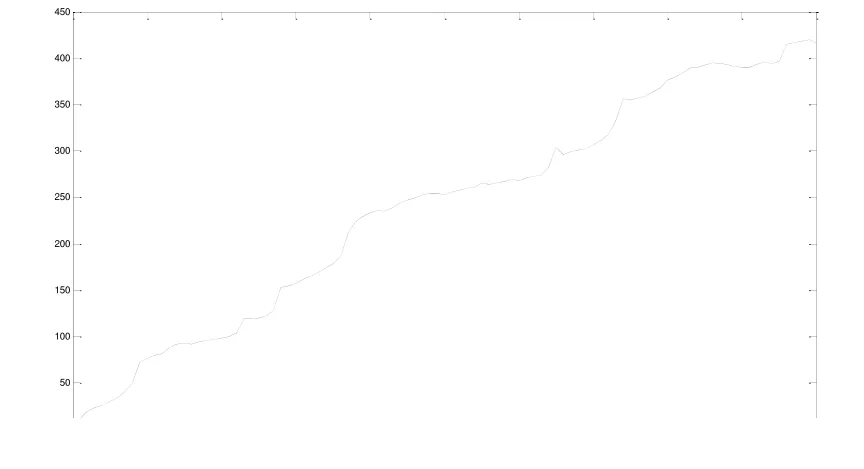
图6 滤波后的流体动态称重系统数据
对比两组实验数据,可以得到以下结论:
基于流体冲击力动量模型的逼近估计迭代算法能够有效辨识流体冲击力干扰,根据相应的滤波算法可以尽可能消除冲击力干扰,在流体动态称重系统中有一定的应用价值。
[1] 陈宝远,房国志,于晓洋.多级给料粉状物料称重系统的预测控制算法[J].电机与控制学报,2005,9(3):287-290.
[2] 顾伟.散货港口多电机传动运输系统故障诊断与容错控制[D].上海:上海海事大学,2008.
[3] 白瑞林,严新忠,李军.基于模糊神经网络技术的定量秤研究[J].计量学报,2004,25(2):127-130.
[4] 李智辉.高粘度流体动态自适应称重系统的研究[C].2009全国虚拟仪器大会论文集(二),2009.
[5] Jianxin Chu,Wei Gu.Adaptive dynamic detection of separated bulk matter in conveyor system[J].IEEE Trans. Instrument and Measurement,2006,55(3):809-813.
TP271
A
2015.03.09)
1007-757X(2015)07-0027-04
吴 刚(1988-),男,江苏无锡人,上海海事大学,硕士研究生,研究方向:船舶与港口自动化技术,工业控制,上海,201306
姚 文(1957-),男,上海人,上海海事大学,高级工程师,硕士,研究方向:工业自动化,上海,201306
猜你喜欢
能源工程(2022年2期)2022-05-23
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
大众科学(2020年7期)2020-10-26
发电设备(2020年5期)2020-10-09
VOGUE服饰与美容(2019年10期)2019-12-02
传动技术(2019年1期)2019-09-05
重型机械(2019年3期)2019-08-27
汽车与驾驶维修(维修版)(2017年4期)2017-07-18
科技资讯(2016年5期)2016-08-13
体育科研(2016年5期)2016-07-31
