基于投影法的不确定分数阶混沌系统自适应同步
2015-07-18 12:04:47张友安余名哲耿宝亮
电子与信息学报 2015年2期
张友安 余名哲耿宝亮
(海军航空工程学院控制工程系 烟台 264001)
基于投影法的不确定分数阶混沌系统自适应同步
张友安 余名哲*耿宝亮
(海军航空工程学院控制工程系 烟台 264001)
针对一类具有未知参数、未知非线性函数及外部扰动的分数阶混沌系统,基于分数阶系统稳定性理论和Lyapunov稳定性理论,该文提出一种基于滑模自适应和投影法的同步控制策略。首先选取一类稳定的分数阶积分滑模面,运用自适应技术对不确定项进行估计,设计了同步控制器。然后对自适应设计中容易出现的增长型自适应律运用投影法进行修正,以保证参数有界,从而也保证控制输入有界。最后数值仿真证明了所设计控制器的正确性和有效性。
分数阶混沌系统;滑模自适应控制;投影法;参数有界
1 引言
自90年代初,美国海军实验室的学者Pecra和Carrol在电子线路的设计实验中实现了混沌同步[1]以来,由于其巨大的应用潜力,混沌同步的研究引起了国内外学者空前的兴趣。在过去的二十年中,混沌系统的同步研究得到了长足的发展,多种同步方法被提出来[2,3],各种先进的控制理论被人们引入混沌同步控制中,所研究的对象从理想的混沌系统模型到具有不确性的混沌模型,在理论上几乎已经完备,并且这些控制方法已在保密通信等实际工程领域得到了广泛应用,并获得了很好的效果。但是随着研究的深入,学者们也逐渐碰到一些新的问题,在很多工程领域,系统的数学模型所表现出的混沌特性不仅是整数阶的,同时也有分数阶的[4],并且分数阶系统的混沌特性要远比整数阶次时复杂,其不仅具有整数阶混沌系统固有的混沌特性同时也具有分数阶系统相关的一些特性,因此其在工程领域特别是在保密通信领域中的应用潜力更加巨大,这样就有了要对分数阶混沌系统进行同步控制的新课题。
当前,绝大多数对分数阶混沌同步进行理论研究的文献中,研究的对象模型大多精确已知,或者仅存在简单的参数未知或外部扰动的情况,在进行控制器设计的时候作者也往往要求有不确定项上界已知等种种约束条件。但是在实际控制中,系统的不确定性绝不仅仅只有未知参数那么简单,比如在保密通信[5],图像加密[6],生物工程[7]等领域,系统往往存在多种不确定性,这些不确定性将为系统的同步控制带来不可预计的影响,并且这些不确定项的上界信息绝大多数情况下是不可能为设计者所掌握的。
自适应控制对不确定性的处理有其独有的优势[8,9],但是,设计者们也常看到这样一些现象,有些设计的参数自适应律理论上虽然能够使得对象系统稳定,但在实际控制过程中由于扰动的影响却容易发生自适应参数发散,这就是通常被称之为的增长型自适应律。这种自适应律在实际控制中会随着时间导致控制量无界,而这种情况在控制设计中是令人无法接受的。例如文献[10-12]等一大类采用自适应技术实现混沌同步的控制器设计中都出现了这样的问题,而这种情况目前还并没有引起相关学者的重视。投影法[13]采用对参数设置约束集的办法,可将参数向量限制在约束集内,保证自适应参数的有界性。
本文的目的就是在运用自适应控制方法实现不确定分数阶混沌系统同步后,采用投影法对基本的自适应律进行修正,以保证参数有界,解决增长型自适应律存在的参数无界问题,以增强混沌同步方法的实用性。
2 问题描述和模型建立
考虑式(1)所示的分数阶混沌系统:

现将式(1)作为驱动系统,构建相应具有控制输入的响应系统:

式中y(t)∈Rn为响应系统的状态向量;G(y,t)为适当维数函数矩阵;δ∈Rm2为未知的参数向量,g(y,t)∈Rn是已知光滑向量函数;Δg(y,t)∈Rn为未知有界的向量函数;dy(t)∈Rn为未知有界的外部扰动;u(t)为待设计的控制输入。
定义驱动系统与响应系统的误差e(t)=y(t)-x(t ),本文的目的就是设计控制器u(t),使得当t→∞时有e(t)=0,即驱动系统与响应系统达到完全同步。
考虑驱动式(1)和响应式(2),分数阶同步误差系统方程为
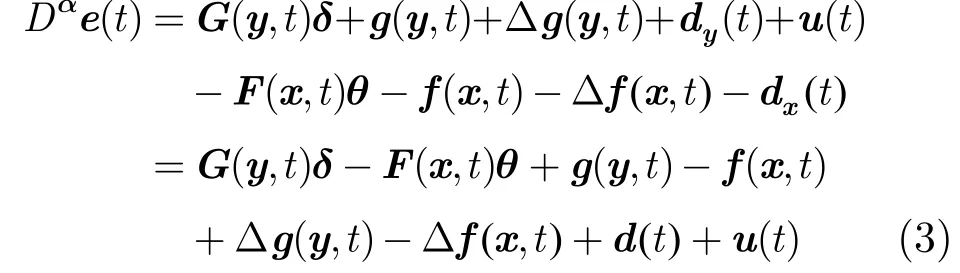
其中d(t)=dy(t)-dx(t )。
3 自适应同步控制器设计
为方便读者理解,在本节先对文献[15]所做的工作做简单的介绍。
选取如式(4)所示的滑模面:

式中s∈Rn, e∈Rn, C∈Rn×n。
对式(4)两边关于时间求导:

由滑模面开始滑模运动条件s=0和s˙=0,及分数阶系统稳定性条件[16]可知,当选取合适的矩阵C,式(5)将是渐近稳定性的,也即s=0时有e→0,并且C的选取将决定e→0的速度。
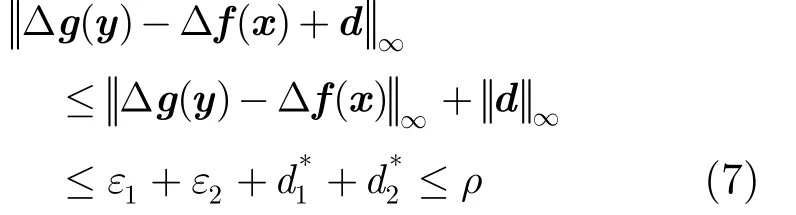
假设1 系统非线性不确定项和外部干扰均有界,且满足

式中ε1, ε2,,为非负常数,那么对任意时间t总是存在一个正常数ρ满足
假设2 未知参数向量δ和θ是定常的或是慢时变的。
设计如式(8)所示的控制律:

选取参数自适应律:
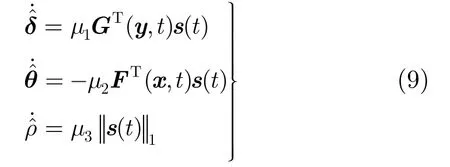
式中μ1, μ2, μ3为设计权重,且为正常数。
将式(8)代入式(3)可得误差系统方程为

将式(10)代入式(5)可得

综合以上分析,有如下定理存在。
定理1 在同步控制律式(8)和自适应律式(9)的作用下,误差式(3)将渐近收敛到滑模面s=0上,即驱动系统式(1)和响应系统式(2)达到完全同步。
定理1的证明过程参见文献[15]。
4 参数投影法修正自适应律
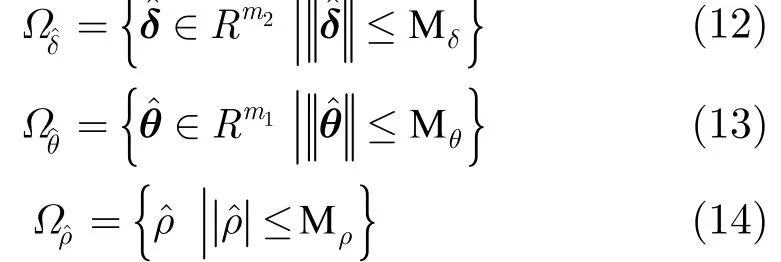
式中Mδ, Mθ, Mρ均为常数,它们的值将依据对应的不确定项的变化范围来给出。
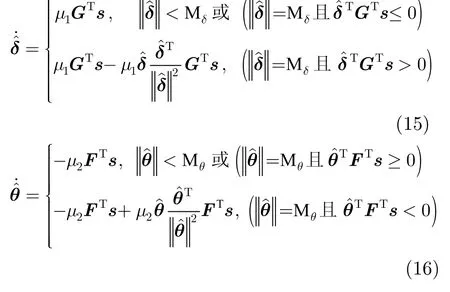

定理2[13]设约束集,和的定义由式(12)~式(14)给出。假如参数的初始值满足(0)∈和0)∈,则对任意时间t≥0,自适应律式(15)~式(17)能够保证(t)∈。
定理3 在同步控制律式(8)和修正自适应律式(15)~式(17)的作用下,驱动系统式(1)和响应系统式(2)将达到完全同步。
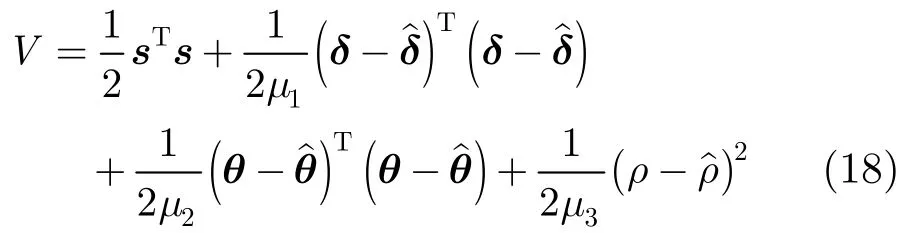
证明 选择如式(18)所示的Lyapunov函数:
对等式两边关于时间求导,并将式(11)和修正自适应律式(15)~式(17)代入可得
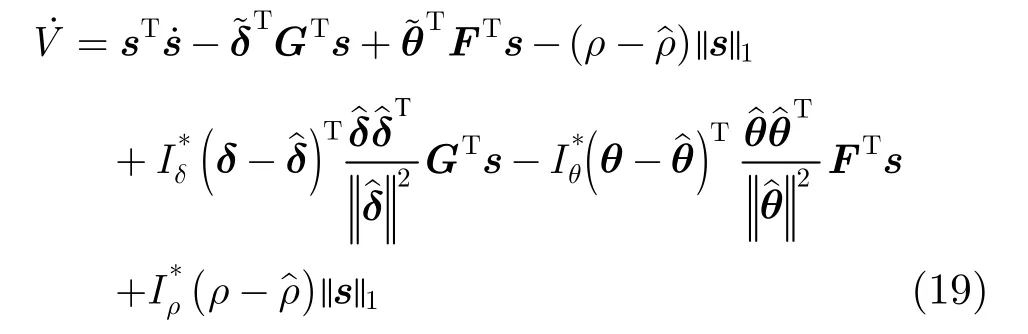

将式(11)代入式(20)可得
进一步结合文献[15]的稳定性证明,结合Barbalat引理[19]可知结论成立。 证毕
5 数值仿真与分析
本文采用如下对象模型进行仿真验证,并采用预估-校正算法进行分数阶微分方程的解析运算。
以不确定分数阶Chen系统作为驱动系统:
当αi=0.9,i=(1,2,3),未知参数a=35, b=3, c=28时,驱动系统表现出混沌状态。
选取不确定分数阶Rössler系统增加控制输入构建响应系统:

当αi=0.9,i=(1,2,3),未知参数m=0.4, p=0.2, r=10时,响应系统表现出混沌状态,其混沌相图见图1。
给定驱动系统和响应系统的初始值为(2,4,1)T和(-4,-3,2)T,为简单起见取矩阵C=I,设计参数μ1=10, μ2=20, μ3=10, k=2。根据给定的驱动系统,对不确定项取∞-范数,可以得到未知项的上界取值范围:d*≥1.4, ε1≥0.2, ε2≥0.3。预设参数估计初值为0)=(0,0,0)T,(0)=(0,0,0)T,0)=0.1,并设定不确定项ρ的约束集Mρ=1.5,参数b的约束集为Mδb=3.3。
由定理1可知,误差系统在如下的控制器作用下将稳定到零点。
控制律:
基本自适应律:

图1 不确定分数阶Rössler系统混沌吸引子(α=0.9)
由给出的模型条件,对系统进行数值仿真,仿真结果如图2~图4所示。图2为对定理3的仿真验证曲线,分析发现所设计的同步控制器可以在有限时间内实现对不确定分数阶混沌系统的同步,并且参数自适应律可以较好地逼近真实值;图3为对基本自适应律参数b和参数ρ应用投影法进行修正后的效果,可以看到,这两个参数有效地被限制在了所设定的约束集内;图4为采用投影法前后控制输入的对比较果,为了进行清楚的比较,分别绘制了控制量u1和u2,从图中可见,当未采用投影法时,随时间积累,控制量慢慢增加,并逐渐发散,采用投影法后,u1和u2被限制在一个有限范围内,为有界控制,因而控制是可实现的。
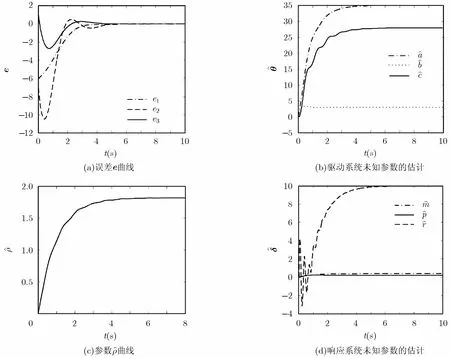
图2 采用投影法前同步仿真曲线
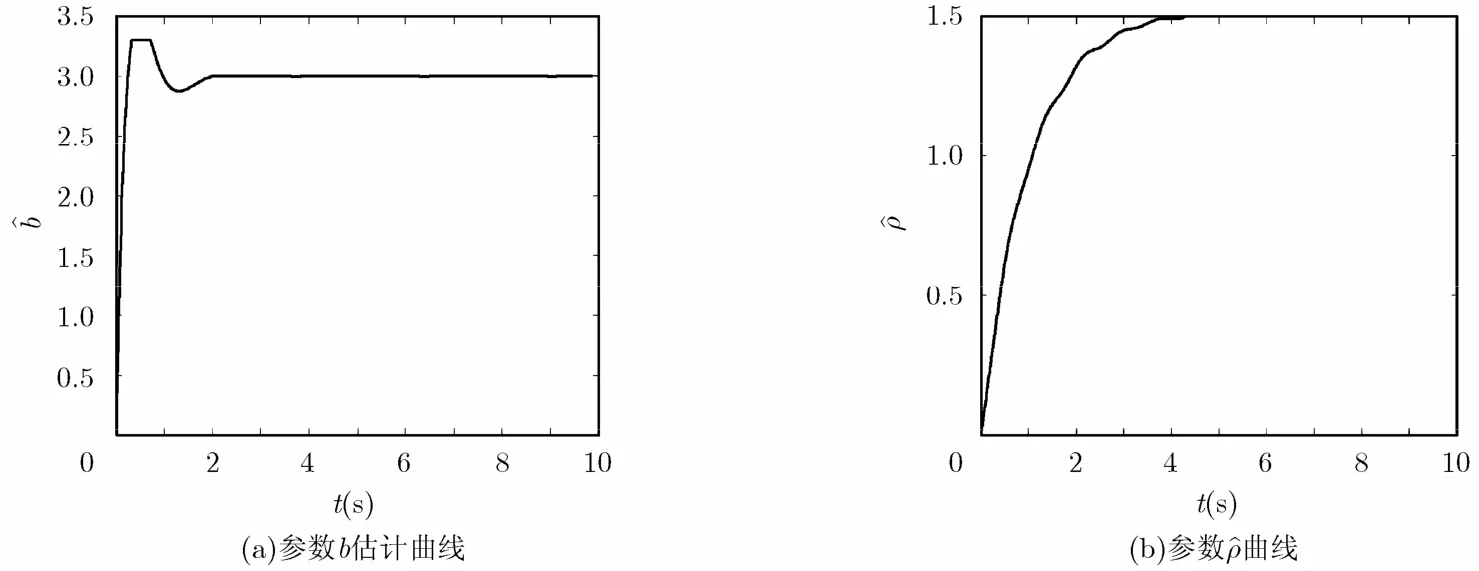
图3 采用投影法后参数辨识结果

图4 采用投影法前后控制输入对比曲线
6 结束语
本文对存在未知参数、非线性未知项和外部扰动的分数阶混沌系统做了自适应同步研究,首先选取了一类稳定的分数阶积分滑模面,然后对慢时变的未知参数和不确定上界ρ设计了相应的自适应律,接着设计了同步控制器,最后,为了防止自适应参数发散,采用投影法对自适应律进行了修正。参数是比较典型的增长型自适应律,从仿真情况来看,经修正后的自适应律完全可以保证自适应参数有界。
[1] Pecora L M and Carroll T L. Synchronization in chaotic systems[J]. Physical Review Letters, 1990, 64(8): 821-824.
[2] Sheikhan M, Shahnazi R, and Garoucy S. Synchronization of general chaotic systems using neural controllers with application to secure communication[J]. Neural Computing and Applications, 2013, 22(2): 361-373.
[3] Wang Bo, Peng Shi, Karimi H R, et al.. Robust H∞synchronization of a hyper-chaotic system with disturbance input[J]. Nonlinear Analysis: Real World Applications, 2013, 14(3): 1487-1495.
[4] Razminia A and Baleanu D. Complete synchronization of commensurate fractional order chaotic systems using sliding mode control[J]. Mechatronics, 2013, 23(7): 873-879.
[5] Luo Chao and Wang Xing-yuan. Chaos generated from the fractional-order complex Chen system and its application to digital secure communication[J] International Journal of Modem Physics C, 2013, 24(4): 25-48.
[6] Sheu L J. A speech encryption using fractional chaotic systems[J]. Nonlinear Dynamics, 2011, 65(1/2): 103-108.
[7] Park M J, Kwon O M, Park J H, et al.. Synchronization criteria for coupled stochastic neural networks with time-varying delays and leakage delay[J]. Journal of the Fracklin Institute, 2012, 349(5): 1699-1720.
[8] Aström K J and Wittenmsrk B. Adaptive Control[M]. Second Edition, Mineola, NY, US: Dover Publications Inc, 2011: 24-33.
[9] Bernardo M D, Montanaro U, and Santini S. Hybrid model reference adaptive control of piecewise affine systems[J]. IEEE Transactions on Automatic Control, 2013, 58(2): 304-316.
[10] Wang Cun-xu, Lin Sheng, Cao Fu-yi, et al.. Adaptive synchronization for a class of novel uncertain chaotic systems with channel delay and its applications to secure communications[C]. Proceedings of the 3rd IEEE International Conference on Broadband Network and Multimedia Technology (IC-BNMT), Beijing, China, 2010: 80-84.
[11] 李秀春, 徐伟, 肖玉柱. 一类受扰混沌系统的自适应滑模控制[J]. 物理学报, 2008, 57(8): 4721-4728. Li Xiu-chu, Xu Wei, and Xiao Yu-zhu. Adaptive slide mode control for a class of chaotic systems with perturbations[J]. Acta Physica Sinica, 2008, 57(8): 4721-4728.
[12] Zhang Ruo-xun and Yang Shi-ping. Robust chaos synchronization of fractional-order chaotic systems with unknown parameters and uncertain perturbations[J]. Nonlinear Dynamics, 2012, 69(3): 983-992.
[13] Luenberger D G. Optimization by Vector Space Methods[M]. Stanford University, CA, US: John Wiley & Sons, 1968: 297-299.
[14] Jankowski T. Fractional equations of Volterra type involving a Riemann–Liouville derivative[J]. Applied Mathematics Letters, 2013, 26(3): 344-350.
[15] 余名哲, 张友安. 一类不确定分数阶混沌系统的滑模自适应同步[OL]. http: //www. cnki.net/kcms/detail/11. 2625. V. 20131224. 0835. 005. html, 2013, 12. Yu Ming-zhe and Zhang You-an. Sliding mode adaptive synchronization for a class of fractional-order chaotic systems with uncertainties[OL]. http://www.cnki.net/kcms/detail/ 11.2625.V.20131224.0835.005.html, 2013, 12.
[16] Matignon D. Stability results for fractional differential equations with applications to control processing[C]. Proceedings of the Computational Engineering in Systems Applications, Lille, France, 1996, 2: 963-968.
[17] Luenberger D G and Ye Y. Linear and Nonlinear Programming[M]. Third Edition, Stanford University, CA, US: Springer, 2008: 330-345.
[18] Wang Li-xing. A Course in Fuzzy System and Control[M]. Upper saddle River, NJ, US: Prentice-Hall, Inc, 1997: 254-261.
[19] Wu Zhao-yan and Fu Xin-chu. Structure identification of uncertain dynamical networks coupled with complex-variable chaotic systems[J]. IET Control Theory & Applications, 2013, 7(9): 1269-1275.
张友安: 男,1963年生,博士,教授,研究方向为非线性理论,导航、制导及智能控制研究.
余名哲: 男,1982年生,博士生,研究方向为非线性理论及混沌同步研究.
耿宝亮: 男,1984年生,博士生,研究方向为智能控制及应用研究.
Adaptive Synchronization of Uncertain Fractional-order Chaotic Systems Based on Projective Method
Zhang You-an Yu Ming-zhe Geng Bao-liang
(Department of Control Engineering, Naval Aeronautical and Astronautical University, Yantai 264001, China)
Based on the stability theory of fractional-order system and Lyapunov stability theory, and using the sliding mode adaptive control and projective method, a synchronization control strategy is proposed for a class of fractional-order chaotic systems with uncertain parameters, uncertain nonlinear functions and external disturbances. A stable fractional-order integral sliding surface is selected and the adaptive laws are designed to estimate the uncertainties, consequently, the synchronization controller is obtained. Then, the projective method is introduced to modify above basic adaptive laws to prevent the adaptive parameters from diverging to infinite, thus, the boundedness of the control inputs is guaranteed. Finally, the numerical simulation result is presented to show the effectiveness and applicability of the proposed control strategy.
Fractional-order chaotic system; Sliding mode adaptive control; Projective method; Bounded parameter
TP273
A
1009-5896(2015)02-0455-06
10.11999/JEIT140514
2014-04-22 收到,2014-06-30改回
*通信作者:余名哲 18953589889@189.cn
猜你喜欢
数学物理学报(2021年1期)2021-03-29 03:14:42
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:34
学生天地·小学低年级版(2019年5期)2019-06-05 01:15:11
学生天地(2019年15期)2019-05-05 06:28:28
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
制造技术与机床(2017年2期)2017-05-04 04:17:24
舰船科学技术(2015年8期)2015-02-27 15:38:46
航天返回与遥感(2014年5期)2014-07-31 17:57:09