一种应用于斜视聚束模式的改进极坐标格式成像算法
2015-12-13 11:45:56李亚超李学仕邢孟道
电子与信息学报 2015年2期
邵 鹏 李亚超 李学仕 邢孟道
1 引言
合成孔径雷达(Synthetic Aperture Radar, SAR)具有全天时全天候的特点[1]且能够获得目标区域的2维高分辨图像[2],因此近几年,在军事和民用方面都得到了广泛的应用。随着对战场和目标信息的军事需求日益增加,对大斜视角和高分辨率SAR成像的需要也变得越来越迫切。由于斜视聚束成像模式兼顾了高分辨与斜视两个方面的优势[3],因此斜视聚束SAR成像算法成为国内外学者研究的热点问题[4,5]。
Omega-k及 PFA(Polar Format Algorithm)为聚束成像中最常用的插值类算法[6],其中 Omega-k算法是一种精确算法,无任何忽略及近似,作为插值类算法,Omega-k算法得到较广泛的应用,然而Omega-k算法存在两个缺点,一定程度上限制了该算法的应用:(1)Omega-k算法的运动补偿一直是在应用方面的最大限制因素,运动误差估计较为困难;(2)限制 Omega-k算法的另一个因素是频谱不能存在混叠,在条带、滑动聚束、TOPSAR等成像模式下,PRF一般是可以满足Omega-k算法应用需求的,然而在斜视聚束模式下,为了获得较高的方位分辨率,通常要求较长的方位积累时间,因此容易造成方位频谱混叠。在未进行方位频谱解模糊的情况下,Omega-k算法无法应用于低 PRF聚束模式的 SAR成像。PFA算法首先对回波数据进行了deramp,有效地避免了方位频谱混叠。相对于Omega-k算法,PFA更适用于低PRF的斜视聚束成像。PFA主要包括固定场景及沿视线两种插值方式[7],其中固定场景插值的优点在于不存在几何形变,进行2维插值后便可以获得无几何形变的图像。正是由于固定场景插值不存在几何形变的原因,数据频谱的2维耦合给频谱插值带来影响,使得固定场景插值变得复杂,只能通过构造插值滤波器进行逐点插值,因此增加了插值的运算量。而沿视线插值很好地解决了2维频谱耦合的问题,通过沿斜视角的视线方向重新建立成像坐标系,将频谱插值分解为两个1维数据插值,从而大大缩减了插值带来的运算量。在正侧视条件下,采用沿视线插值时,成像坐标系无需进行旋转,数据方位采样在成像坐标系上是等间隔分布的,因此不需要考虑频谱方位向非均匀插值对成像聚焦的影响。在斜视情况下,数据在原始坐标系的方位采样仍然是等间隔分布的,文献[8]中提到脉冲之间的转角近似为常数,认为方位采样间隔在旋转后坐标系的投影近似相等。实际上当坐标系旋转后,方位采样间隔在新坐标系下的投影却是非均匀的,由于获得的方位频谱是非均匀采样的,因此方位聚焦范围很小,大大限制了PFA在斜视聚束成像方面的应用。文献[9]提出了解决方位非均匀采样方法,该方法是基于构造滤波器对非均匀的数据进行升采样,进而选取等间隔的数据,但利用该方法所得到的图像分辨率降低,图像信息丢失严重,从而失去了聚束成像的意义。
在斜视情况下,本文针对极坐标方位重采样的非均匀性提出新的插值方法,根据斜视聚束的几何关系确定了方位重采样的形式,从而实现对方位频谱的精确插值,解决了方位频谱的非均匀采样[10]。因为在旋转后的坐标系下插值,斜视聚束的成像模型等效为正侧视聚束模型[11],大大增加了斜视聚束模式下的成像范围。在获得等效正侧视的2维频谱后进行2维IFFT,从而实现对图像的聚焦。最终对图像进行几何形变校正,可以得到聚焦良好的斜视聚束图像。
2 斜视聚束几何模型
斜视聚束几何模型如图 1所示,平台沿x轴方向飞行。天线波束始终指向场景中心O, O点坐标为(0,Yc),当载机位于全孔径中心(Xc,0)时,天线与场景中心点O形成的斜视角为θsq。
雷达发射线性调频信号,信号载频为 fc,脉冲宽度为 Ts,信号带宽为B,调频斜率为γ。雷达回波基带信号可以表示为
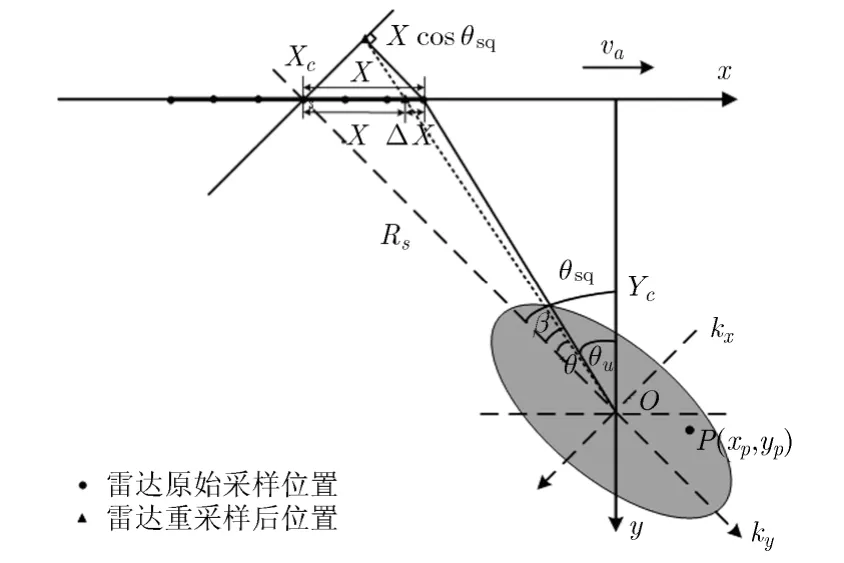
图1 斜视聚束斜距平面几何模型


为了对回波信号s( t, X)进行距离匹配滤波,首先将s( t, X)距离向傅里叶变换,可以得到s( kr, X)。

其中P( kr)= F T re ct (t/ Ts)exp (jπγt2), FT[.]表示傅里叶变换, kr= krc+Δkr为距离波数, krc=4 π fc/c 为距离波数中心,Δ kr= 4 π fr/c为距离波数范围, fr∈[- Fs/2,Fs/2]为距离频率, Fs为距离向采样频率。
构造距离匹配滤波函数并以场景中心为参考点构造方位deramp函数,如式(3)所示。

将式(2)与式(3)相乘,从而完成距离向匹配滤波及方位粗聚焦,如式(4)所示。

其中 A = | P ( kr)|2为匹配滤波后信号幅度。
根据远场假设,可以将式(4)中的指数项进行泰勒级数展开为

其中 qx=- ( Xc+ X ) / Rref(X), qy=Yc/Rref(X) ,式(5)中 qx包含了目标沿航向的位置信息,qy包含了目标跨航向的位置信息。ξ (xp, yp,X)为波前弯曲项,如果只考虑波前弯曲的二次项而忽略高次项的影响,则波前弯曲项可以表示为式(6)。

从式(6)中的 ξ(xp,yp, kx) 可以看出,波前弯曲只与及目标的坐标有关,由于该项会引起图像方位向的散焦,因此 ξ(xp, yp, kx)限制了成像场景的大小。为了增大成像的范围,可以采用对波前弯曲项进行补偿[12]或是对图像进行滤波[13]的方法,进而能够减小波前弯曲对图像聚焦的影响。图像能够聚焦的条件是 ξ(xp, yp,kx)的变化小于π/4,可以得到聚焦场景为
为了进一步推导式(4)的形式,分别将 qx与 qy及Rref(X )代入式(5)及式(4)中,得到目标位置信息的表达式为
如图2所示,分别将固定区域与沿视线两种插值方式进行对比,图 2(a)所示为固定区域插值,该插值方式是在有效的频谱内选取一个矩形。图2(b)沿视线插值是沿中心视线方向选取倾斜的内接矩形,对选取区域的频谱进行插值,从而获得了均匀的频谱。根据几何关系可知,当斜视角较大时,固定区域插值选取的矩形距离向较短,方位向较宽,经过插值后,导致图像距离分辨率降低。沿视线插值始终保持选区的矩形区域不变,从而避免了图像分辨率的损失。
在进行固定区域插值时,数据频谱2维耦合在一起给频谱插值带来影响,使得固定场景插值变得复杂,只能通过构造插值滤波器进行逐点插值,从而增加了插值的运算量,固定区域插值与沿视线插值相比,运算量过大,因此固定区域插值并不是最优的选择。由于沿视线插值可以有效地解除频谱的2维耦合,可以将2维数据插值分解为两个1维数据的插值,从而大大减小了插值带来的运算量。
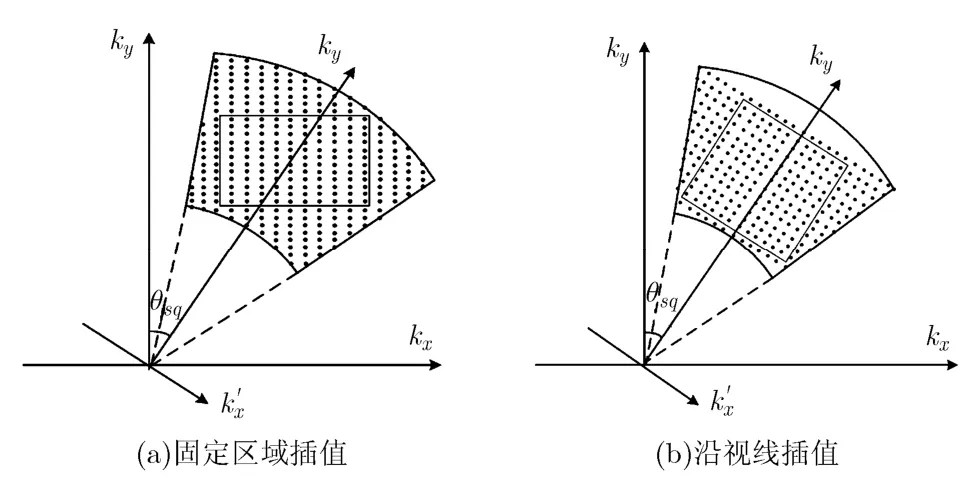
图2 视线插值与固定区域插值


由图1所示的几何关系可知坐标系旋转后,式(8)可以简写为
从式(9)可知,要实现 2维频谱解耦合需令kx=-X c os θsqky/Rs,对方位频谱进行重采样。如图1所示,当距离频谱沿视线插值之后,坐标系的 ky轴旋转了斜视角θsq。ky经过旋转之后,同样也需要将kx轴旋转θsq。在新的坐标系建立之后,根据坐标系旋转前后的几何关系可知:

其中β为天线波束与旋转之后ky轴的瞬时夹角,θu为载机与旋转之前y轴的瞬时夹角。在完成距离向插值后,由于 kx轴与 ky轴正交,所以 kx= - kytan β,将tanβ代入 kx,得到 kx= - X c os θsqky/(Rs- X sin θsq) 。由于 kx并不是X的线性函数,得到的 kx并不是等间隔采样的,如果直接按非均匀采样的 kx对 s( ky,X )进行插值,会导致方位频谱非等间隔采样,从而引起图像方位向散焦,限制了成像范围。为了得到方位向均匀的频谱,需要根据等效正侧视聚束模式下的kx=-X c os θsqky/Rs对方位频谱进行重采样。
在旋转后的坐标系下,有 kx=-X c os θsqky/Rs,根据所得的 kx映射到原始坐标系下,如图1所示。雷达重采样后的位置可以表示为X' = X - ΔX ,其中ΔX为雷达重采样位置与原始位置的变化量。

其中tanθ及tanβ可以表示为

将tanθ及tanβ代入XΔ,XΔ可以写为

将XΔ代入到X',从而得到方位重采样的位置:

其中X'是根据新坐标系下的 kx经过斜视聚束的几何关系映射到原始坐标系的方位采样位置,根据原有非等间隔采样的方位频谱,对方位频谱进行重采样,从而完成了非均匀频谱到均匀频谱的转换。从式(14)可以看出,转换之前,在新坐标系下方位采样间隔是非均匀分布的,在原始坐标系下是等间隔分布的。而转换之后方位采样间隔在新坐标系下是等间隔分布,在原始坐标系下是非均匀分布的,二者存在一一的对应关系。
将X =-kxsec θsqRs/ky代入式(9)中,可以得到

对式(15)进行2维IFFT,可以得到点目标响应函数为

根据式(16)所对应的几何关系可知,对方位频谱进行重采样,得到等效正侧视的聚束图像在新的成像坐标系下存在几何形变。由于坐标系旋转的几何关系已知,可通过几何形变将图像校正到原始坐标系下。点目标响应函数可以表示为

从式(17)可以看出,斜视情况下,通过极坐标格式插值算法,目标位置信息得到良好恢复。实测数据处理流程如图3所示。
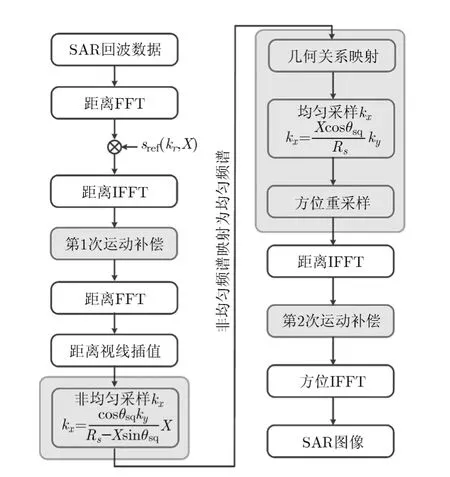
图3 算法流程图
3 实验仿真及实测数据处理
3.1 实验仿真
为了验证本文方法的有效性,根据实测数据的参数进行了实验仿真,雷达工作在X波段,雷达系统参数如表1所示。
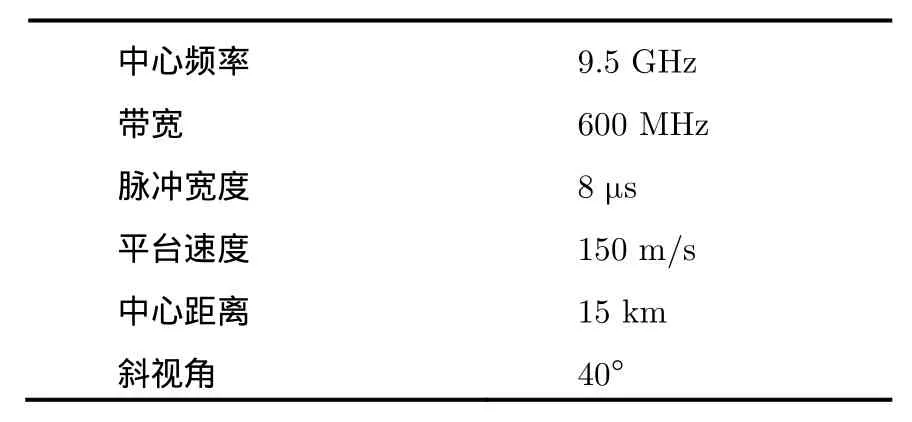
表1 雷达系统参数
处理结果如图4所示,场景为500 m×500 m的矩形方阵,目标之间进行等间隔分布,方位积累点数为16384点,距离分辨率为0.3 m,方位分辨率为0.25 m。如图4(a)所示,进行距离插值后,没有考虑方位采样间隔在新坐标系下投影的非均匀性,直接对其进行方位向插值,从图中可以看出边缘点散焦严重,中心点聚焦良好。图 4(b)考虑了坐标系旋转后方位投影对频谱的影响,根据斜视聚束的几何关系得到其精确的数学形式并对其进行插值,从而得到良好聚焦的图像。从图4的对比可以看出,本文方法与直接对方位频谱进行插值相比,增大了斜视聚束的成像范围。
分别提取图 4(a)、图 4(b)中的边缘点并给出了A, B 两个点目标的 PSLR 对比,如图 5(a), 5(b), 5(c),5(d)所示,从图中可以看出,方位频谱的非均匀性对方位聚焦的影响很大,经过对方位频谱的均匀采样后,目标得到良好的聚焦。
3.2 实测数据处理与分析
实测数据的参数与表1所给出的参数相同,利用本文方法及原有方法对斜视聚束数据进行了处理,处理结果如图6所示,方位向积累点数为16384点,距离向点数为16384点,距离分辨率0.3 m,方位分辨率0.25 m,场景距离向宽度为3072 m,方位向宽度为1040 m。
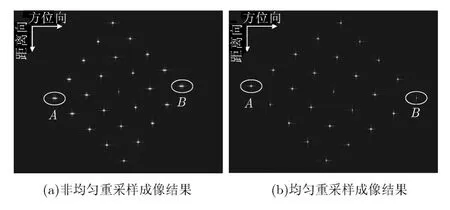
图4 斜视聚束成像仿真结果
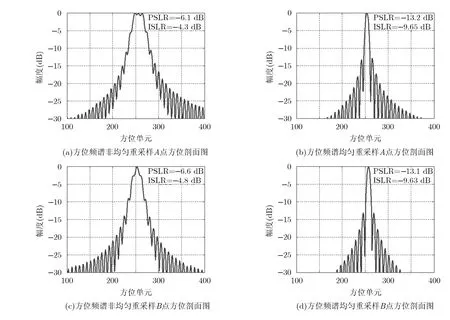
图5 点目标性能对比
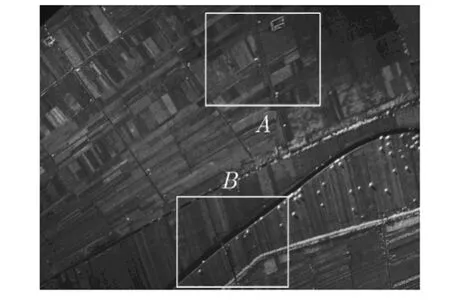
图6 斜视聚束实测数据处理结果
图6 给出了本文方法16384×16384点斜视聚束实测数据处理的结果,从图6中可以看出图像得到良好的聚焦,图7给出了局部区域A, B放大后的图像。从图 7(a)中可以看出未考虑方位频谱的非均匀性会引起图像方位向严重散焦,图 7(b)为采用本文方法所得到的图像,从图 7(a), 7(b)图像的对比来看,改进的斜视PFA算法能够很好地应用于斜视聚束模式下的SAR实测数据处理。
由于PFA对波前弯曲进行了近似,方位向聚焦受到波前弯曲的影响,因此成像范围受到一定的限制。由式(6)可知 PFA 算法存在一定的聚焦范围,分别将数据的参数代入式(6)可以得到成像场景的有效聚焦范围为
从最终的实测数据处理结果可以看出本文方法处理结果良好,在天线波束照射范围内的目标能够有效聚焦,因此该方法可以应用于机载斜视聚束数据处理,在图像的边缘处出现轻微的散焦是由于波前弯曲引起的,对于波前弯曲的校正,可以采用包括图像滤波及波前弯曲补偿等处理算法,本文不再对波前弯曲校正进行描述。
4 结论
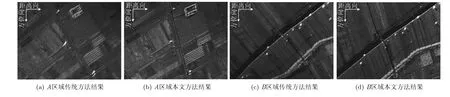
图7 传统方法与本文方法结果对比
在斜视聚束模式下,视线插值在旋转后坐标系的投影具有非均匀性,直接对频谱进行方位插值会导致成像范围变小。本文针对斜视聚束模式下方位的非均匀采样提出一种新的插值方法,该方法根据斜视聚束精确的几何模型确定了方位向插值的形式,从而获得了均匀的方位频谱,有效地增大了斜视聚束成像范围。本文利用该方法进行了实验仿真并对实测数据进行了处理与分析,仿真结果及实测数据处理结果表明该方法的有效聚焦范围比直接进行插值的有效范围大,能够有效地应用于机载斜视聚束实测数据的处理。
[1] Xiong Tao, Xing Meng-dao, et al.. New applications of omega-k algorithm for SAR data processing using effective wavelength at high squint[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(5): 3156-3169.
[2] Zhu Dai-yin and Zhu Zhao-da. Range resampling in the polar format algorithm for spotlight SAR image formation using the chirp z-transform[J]. IEEE Transactions on Signal Processing, 2007, 55(3): 1011-1023.
[3] An Dao-xiang, Huang Xiao-tao, Jin Tian, et al.. Extended two-step focusing approach for squinted spotlight SAR imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(7): 2889-2900.
[4] Zhang Lei, Qiao Zhi-jun, Xing Meng-dao, et al.. A robust motion compensation approach for UAV SAR imagery[J].IEEE Transactions on Geoscience and Remote Sensing, 2012,50(7): 1-17.
[5] Sun Guang-cai, Xing Meng-dao, et al.. Beam steering SAR data processing by a generalized PFA[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(8): 4366-4377.[6] Walker J L. Range-Doppler imaging of rotating objects[J].IEEE Transactions on Aerospace and Electronic Systems,1980, 16(1): 23-51.
[7] Yang Lei, Xing Meng-dao, Wang Yong, et al.. Compensation for the NsRCM and phase error after polar format resampling for airborne spotlight SAR raw data of high resolution[J].IEEE Geoscience and Remote Sensing Letter, 2013, 10(1):165-169.
[8] Carrara W G, Goodman R S, and Ronald M M. Spotlight Synthetic Aperture Radar Signal Processing Algorthms[M].Boston&London: Artech House, 1995: 157-198.
[9] 孙进平, 袁运能, 王俊, 等. CZT在聚束SAR极坐标格式成像算法中的应用[J]. 系统工程与电子技术, 2002, 24(10): 4-7.Sun Jin-ping, Yuan Yun-neng, Wang Jun, et al.. Application of CZT in polar format algorithm of spotlight SAR[J].Systems Engineering and Electronics, 2002, 24(10): 4-7.
[10] Jin T, Bo C, et al.. Image-domain estimation of wall parameters for autofocusing of through-the-wall SAR imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(3): 1836-1843.
[11] Xu Wei, Huang Ping-ping, et al.. Processing of multichannel sliding spotlight and TOPS synthetic aperture radar data[J].IEEE Transactions on Geoscience and Remote Sensing, 2013,51(8): 4417-4429.
[12] Preiss M, Gray D, and Stacy N. Space variant filtering of polar format spotlight SAR images for wavefront curvature correction and interferometric processing[C]. Proceedings of IEEE Geoscience and Remote Sensing Symposium, Toronto,Canada, 2002: 179-181.
[13] 唐禹,邢孟道,保铮,等. 基于重叠子孔径极坐标算法的波前弯曲效应的补偿[J]. 电子学报, 2008, 36(6): 1108-1113.Tang Yu, Xing Meng-dao, Bao Zheng, et al.. Wavefront curvature compensation based on overlapped subaperture polar format algorithm [J]. Acta Electronica Sinica, 2008,36(6): 1108-1113.
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
西南石油大学学报(自然科学版)(2019年1期)2019-01-28 09:33:52
电测与仪表(2016年10期)2016-04-12 00:26:24
电测与仪表(2016年14期)2016-04-11 12:32:48
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
中国卫生标准管理(2015年8期)2016-01-15 03:58:44
中国当代医药(2015年29期)2015-03-01 02:07:48
雷达学报(2014年4期)2014-04-23 07:43:09