基于滑模策略的直接转矩控制研究
2015-07-18 11:08苑伟华潘峰路瑶
电气传动 2015年8期
苑伟华,潘峰,路瑶
(太原科技大学电子信息工程学院,山西太原030024)
基于滑模策略的直接转矩控制研究
苑伟华,潘峰,路瑶
(太原科技大学电子信息工程学院,山西太原030024)
针对永磁同步电机的传统直接转矩控制,存在电磁转矩脉动、磁链波动过大,逆变器开关频率难以稳定等问题,介绍了一种结合滑模变结构控制策略的永磁同步电机直接转矩控制方法。首先,分别设计转矩和磁链2个滑模控制器,取代了传统直接转矩控制中的2个滞环调节器;其次,应用Matlab/Simulink对其进行仿真研究。仿真结果表明,该控制策略能有效减小电机磁链和转矩脉动,而且对参数时变和外部扰动具有较强的鲁棒性。
直接转矩控制;永磁同步电机;滑模变结构;滞环调节器
永磁同步电机(PMSM)的优点在于其转矩控制简单,功率密度、功率因数较高等优良性能,从而受到广泛重视,普遍应用于柔性制造系统、航空航天、大规模集成电路制造等领域。目前,在高性能永磁同步电机(PMSM)控制中,直接转矩控制(DTC)已成为主流控制策略[1]。传统的DTC具有结构简单、响应速度快和鲁棒性强等优点,在电机控制问题中被广泛应用。但随着对电机性能要求的不断提高,传统DTC存在磁链及转矩脉动大、逆变器开关频率不恒定、系统低速状态时难以保证控制精度等问题,成为影响电机性能提高的主要因素[2]。DTC中转矩和磁链脉动问题严重影响了系统性能,究其原因在于逆变器的实际开关频率低于所需要的开关频率,造成在控制周期内采用的有效电压矢量无法与期望的电压矢量相吻合。
为解决传统直接转矩控制(DTC)中存在的诸多问题,很多学者对传统DTC进行了研究和改进。文献[3-4]改进了传统直接转矩控制算法中的开关表,通过增加零电压矢量,采用有效电压矢量和零电压矢量共同作用于逆变器的方式来构成新的电压矢量开关表,但这种改进方法对降低转矩脉动的效果有一定的局限性。文献[5-7]将模糊控制理论与传统DTC相结合,这种方法的优越性体现在可以减小系统转矩脉动,但基于模糊控制的DTC计算量比传统DTC大很多,不利于对系统进行实时控制。文献[8-10]引入了空间电压矢量调制技术,对逆变器部分进行了改进,目的是为了固定逆变器开关频率,从而减小转矩的脉动,但这种改进方法由于转矩和磁链PI调节器的引入使得该方法对系统参数的变化过于敏感而不利于控制。
近几年,滑模变结构控制(VSS)引起了人们广泛重视。它具有许多优点,如鲁棒性强、对外来干扰有强抑制作用、动态响应快等[11-12]。为改善传统DTC中转矩和磁链脉动过大的缺陷,本文将VSS应用到永磁同步电机直接转矩控制系统,使得系统具有良好的动、静态响应效果。
1 永磁同步电机的直接转矩控制
传统永磁同步电机的直接转矩控制的实现建立在两相静止坐标系下,永磁同步电动机中各坐标系之间的关系如图1所示。d轴方向即为转子磁链Ψf的方向;xy坐标系以定子磁链角速度ωs旋转,x轴即为定子磁链的方向;δ是定子磁链Ψs与转子磁链Ψf之间的夹角。
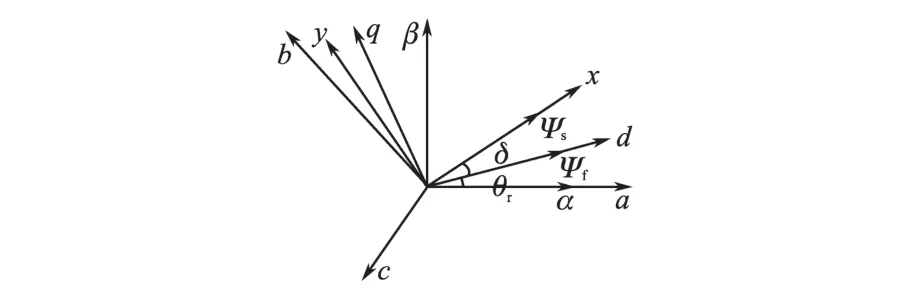
图1 永磁同步电机多种坐标系变化关系Fig.1 Multiple coordinate system of PMSM
1.1 永磁同步电机直接转矩控制原理
隐极式永磁同步电机有Ld=Lq,经过坐标转换可得xy轴上转矩为

式中:Te为电磁转矩;np为电机极对数;Ls为定子电感;δ0为转矩角变化前一时刻的初值;ωsr为定子磁链相对于转子磁链旋转角速度。
式(1)说明PMSM-DTC的基础理论为:在保持定子磁链幅值恒定的前提下,改变它旋转的速度和方向来得到不同的转矩角,改变转矩角进而控制电磁转矩的改变。整个DTC控制系统过程为:将电机定子磁链和转矩的输出值和给定值分别进行比较,然后通过2个滞环比较器得到磁链和转矩控制信号,再通过查询线外的开关表得到所需的电压空间矢量。基于以上说明,将空间电压矢量调制原理引入传统DTC,利用转矩误差和磁链误差实时合成出的最佳电压矢量作用于电机,补偿电机转矩和磁链误差,从而形成了基于空间电压矢量的直接转矩控制系统(SVM-DTC)。但是这种系统存在鲁棒性差的不足,为此本文通过将滑模变结构控制(VSS)引入到永磁同步电机SVM-DTC中,克服其缺点。
1.2 永磁同步电机数学模型
直接转矩控制是建立在两相静止参考坐标系下实现的,由于隐极式PMSM的d,q轴电感的关系为Ld=Lq=Ls,所以其数学模型形式可以写成:
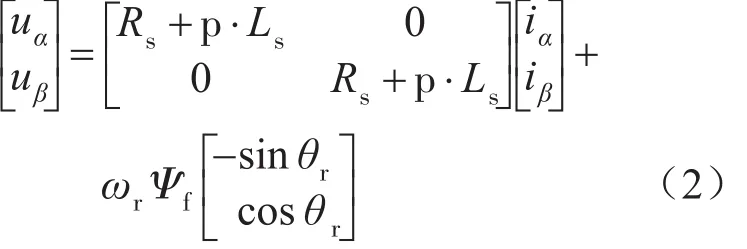
式中:uα,uβ,iα,iβ为电子电压、电流的α,β分量;Rs为定子电阻;ωr为转子电角速度;θr为α轴坐标系与d轴坐标系间的夹角;p为微分算子;Ψf为转子永磁体磁链。
α,β轴上反电势方程可记为
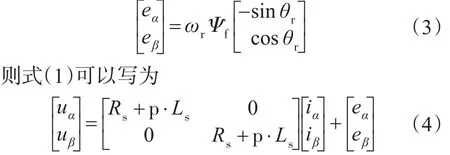
联立式(1)、式(2),则α-β坐标系下的状态方程可表示为
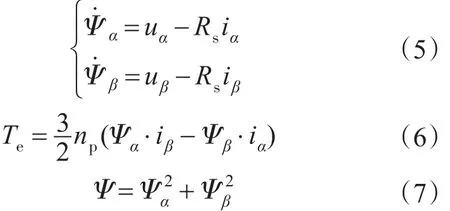
式中:Ψa,Ψβ为定子磁链Ψs在α-β坐标系下的分量。
2 基于滑模策略的DTC控制
实际DTC系统中有很多不确定的扰动因素,例如定子电阻随温度变化、电流测量误差、电压测量误差等,这些扰动会影响转矩控制的性能,这样DTC系统的鲁棒性就成为系统需要具备的性能。滑模变结构控制策略(VSS)是一种不确定非线性系统中的高频开关控制。它鲁棒性强的特点符合DTC系统的性能要求,因此本文将滑模变结构控制策略(VSS)加入PMSM-DTC控制系统中,并对其进行了仿真研究。控制系统原理如图2所示,控制系统采用转矩和磁链2个滑模控制器代替了转矩、磁链滞环比较器和开关表部分,并且结合空间电压矢量调制技术(SVM)。
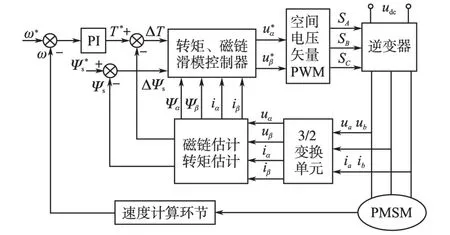
图2 引入滑模变结构的永磁同步电机直接转矩控制系统框图Fig.2System block diagram for PMSM VSS-DTC
滑模变结构需要解决3个基本问题:1)选择切换面方程s(x)=0;2)确定滑模存在的条件;3)确保系统的稳定性。
2.1 滑模面的选择
切换函数有线性切换函数、抛物线切换函数和二次型切换函数等多种形式,本文研究的控制系统是对磁链和转矩进行直接控制,故选用的切换函数为
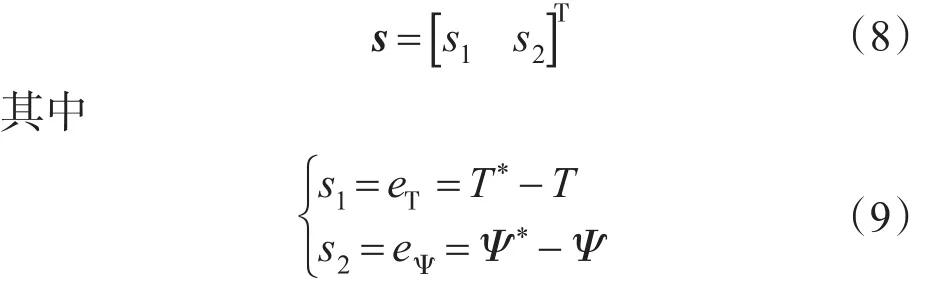
式中:T*为转矩给定;T为实时观测到的转矩;Ψ*为磁链平方给定;Ψ为实时观测到的定子磁链平方;eT为转矩给定值和估算值的误差;eΨ为磁链给定值和估算值的误差。
切换函数s对时间的导数为

对转矩和磁链分别求导如下:
1)转矩部分
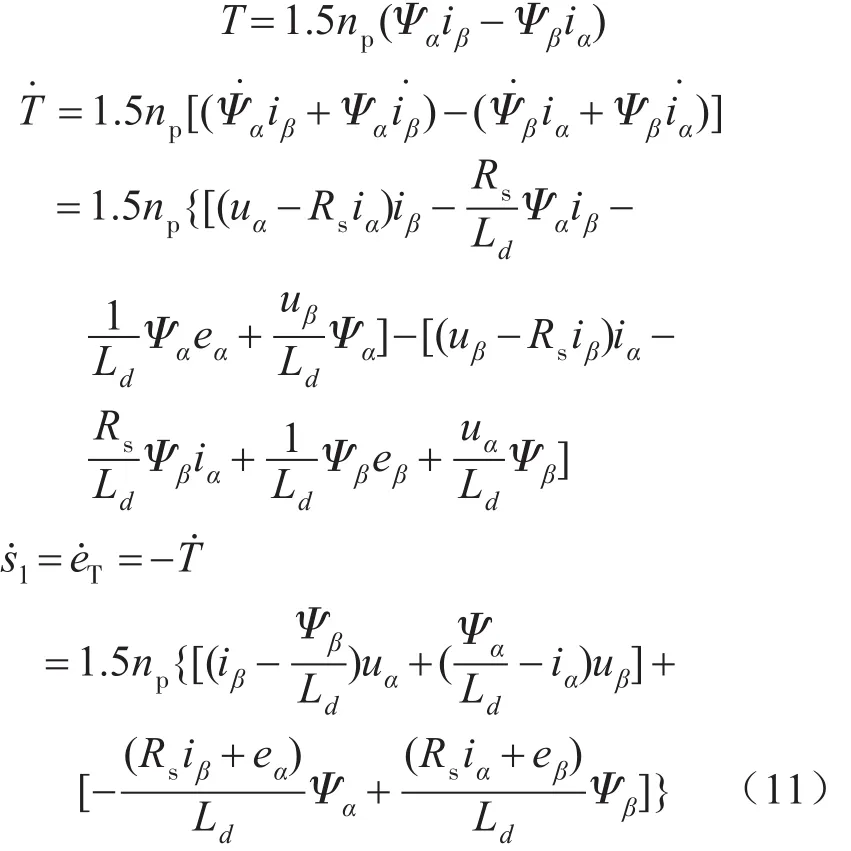
2)磁链部分
由式(2)~式(12)得矩阵方程为

其中
式中:F,D为系数矩阵;U为控制律矩阵。
2.2 滑模的存在性和可达性证明
取李雅普诺夫函数:

对V求导得:

为保证滑模运动中的正常运动段具有良好的动态品质,选取指数趋近律来设计滑模控制器使V·<0,由式(13)控制律可选为

式中:K1,K′,K2,K′为指数趋近律参数。
12
将式(18)代入式(17)可得:
2.3 控制系统的稳定性和鲁棒性验证
系统在稳定运行时,切换函数会受到外界扰动和系统内部器件参数变化的干扰的影响。假设系统稳定运行时受到的干扰为H,则式(13)可写为

式中:H为各种扰动之和。
将式(22)代入式(17)可得:

当K1′>H1和K2′>H2时,,由此可推知,只要设计合理的滑模控制器参数,即可保证系统对鲁棒性的要求。
3 VSS-DTC的仿真与分析
本文在Matlab/Simulink环境下,通过编写S函数建立了加入VSS的永磁同步电机SVM-DTC控制系统的仿真模型,通过仿真来验证该改进方法在改善系统动、静态性能方面的有效性。电机参数为:Ld=Lq=0.008 5 H,Rs=2.875 Ω,Ψs=0.175 Wb,np=4,转动惯量,逆变器直流电压U=800 V。
3.1 VSS-DTC控制性能分析
为验证VSS-DTC控制性能的优越性,在相同情况下,分别采用DTC和VSS-DTC对系统进行仿真,并对磁链、转矩、转速等系统性能进行了比较分析。磁链曲线如图3所示。
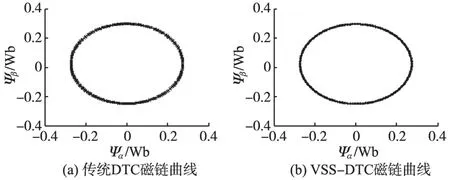
图3 DTC和VSS-DTC两种情况下磁链曲线对比Fig.3 The compare of flux responses between DTC and VSS-DTC
由图3的磁链仿真结果分析可知,VSS-DTC控制系统磁链脉动明显降低,圆形更为圆滑。
转速响应曲线如图4所示。
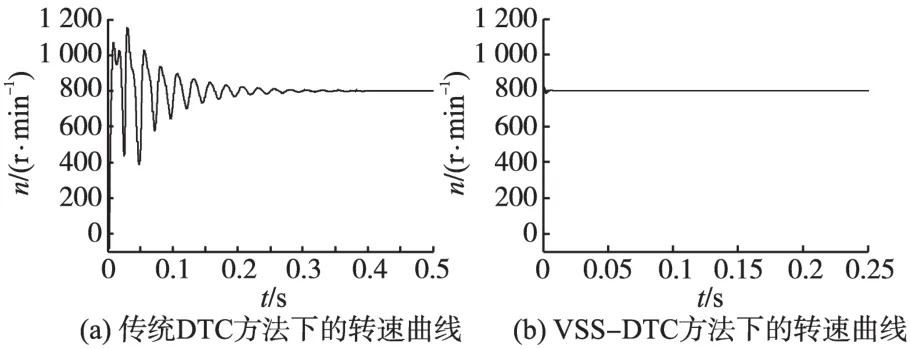
图4 DTC和VSS-DTC两种情况下的转速曲线对比Fig.4 The compare of speed responses between DTC and VSS-DTC
分析图4中的转速响应曲线波形可看出,采用VSS的直接转矩控制系统,转速振动比传统DTC系统减小,且转速响应曲线比传统DTC快了0.02 s,在稳定阶段,VSS-DTC的转速曲线完全平滑。
两种情况下的转矩曲线对比如图5所示。比较图5中的转矩波形可知,DTC控制下的系统转矩产生了明显的脉动,而VSS-DTC控制下的系统脉动减小了,且抖振时间也比前者快0.01 s。
3.2 鲁棒性仿真验证
为了验证VSS-DTC控制鲁棒性,在0.2 s时刻,转矩给定由5N·m变为10N·m,转矩变化曲线如图6所示。
由图6可以明显看出,采用VSS-DTC方法,转矩脉动小并且很快就恢复到稳定状态,证明了其鲁棒性强的特点,系统动态性能得到明显改善,且转矩较稳定。
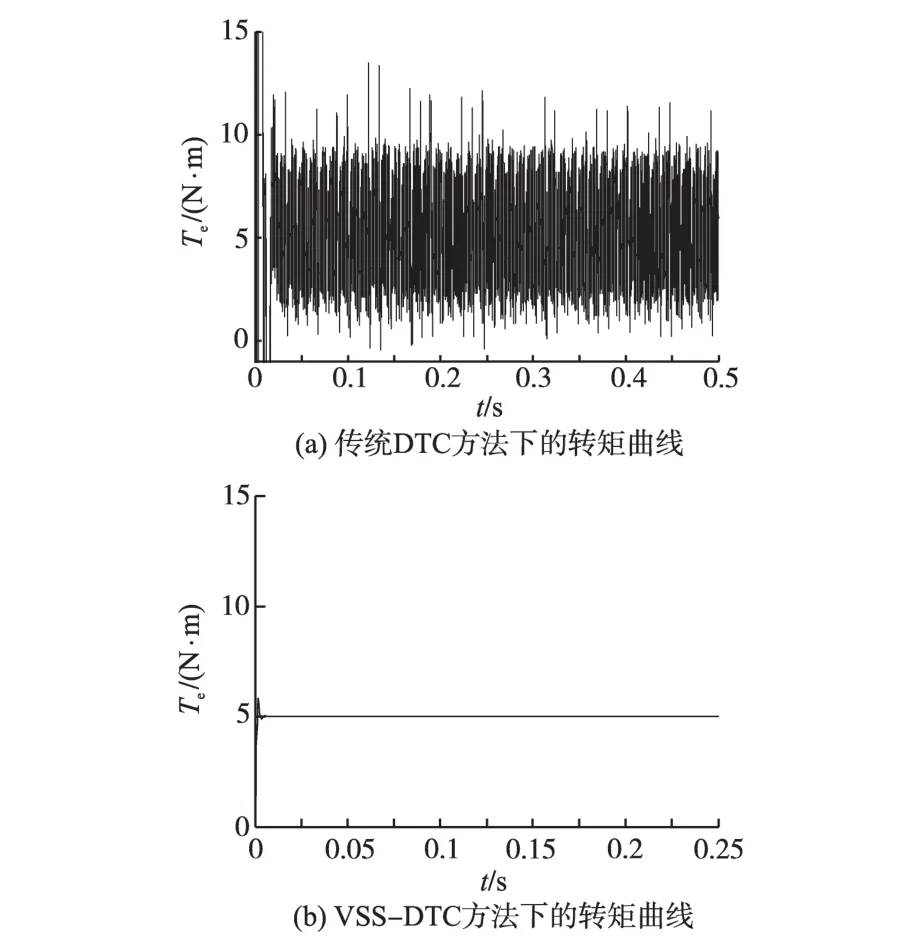
图5 DTC和VSS-DTC两种情况下的转矩曲线对比Fig.5 The compare of torque responses between DTC and VSS-DTC

图6 转矩变化后DTC和VSS-DTC控制下转矩曲线对比Fig.6 The compare of torque responses between DTC and VSS-DTC when the torque changed
4 结论
本文针对永磁同步电机直接转矩控制存在转矩、磁链波动大的问题,引入滑膜控制思想,在空间电压矢量直接转矩控制基础上,设计了滑膜变结构直接转矩控制策略(VSS-DTC)。主要结论如下:
1)根据指数趋近律来设计的滑模控制,既可加快正常运动段的趋近时间又可削弱滑模运动段的抖振,故将其引入DTC中。转矩和磁链滑模控制器的实现通过编写s函数来实现,并且加入了空间电压矢量调制方法,使逆变器开关频率得到固定。
2)VSS-DTC控制系统对DTC系统中转矩和磁链脉动大的不足有明显改善,使传统DTC转矩响应时间减少,有效改善DTC转矩的跟踪性能和稳定性能。
3)VSS-DTC具有较强的鲁棒性,滑模控制对系统自身参数和外部扰动有很强的自适应性,该方法极大地克服了各种扰动对系统运行的影响。
[1]周胜灵,刘峰.永磁同步电机直接转矩控制系统的改进及仿真[J].重庆大学学报,2013,36(11):87-92.
[2]杨建飞,胡育文.永磁同步电机最优直接转矩控制[J].中国电机工程学报,2011,31(27):109-115.
[3]Zhu H,Xiao X,Li Y D.Torque Ripple Reduction of the Torque Predictive Control Scheme for Permanent⁃magnet Syn⁃chronous Motors[J].IEEE Transactions on Industrial Elec⁃tronics,2012,59(2):871-877.
[4]李耀华,郭巧娟,吴俊,等.永磁同步电机直接转矩控制系统开关表分析[J].电气传动,2012,42(11):15-17.
[5]张果,田飞,王剑平,等.基于模糊控制的直接转矩控制系统研究[J].控制工程,2013,20(6):1023-1026.
[6]高圣伟,汪友华,蔡燕,等.基于模糊逻辑的DTC减小转矩脉动方法研究[J].河北工业大学学报,2011,40(3):62-65.
[7]张广远,刘文生,王旭阳.基于模糊神经网络的直接转矩控制系统研究[J].电气传动,2012,42(6):27-31.
[8]张华强,王新生,魏鹏飞,等.基于空间矢量调制的直接转矩控制算法研究[J].电机与控制学报,2012,16(6):13-18.
[9]陆旦宏,金龙,张仰飞,等.基于空间电压矢量细分和调制的永磁同步电机直接转矩控制[J].微电机,2012,44(12):6-9.
[10]邢岩,王旭,刘岩,等.基于空间矢量调制的永磁同步电机新型直接转矩控制策略[J].电气传动,2013,43(S1):6-10.
[11]Zhang Bitao,Pi Youguo.Enhanced Sliding⁃mode Control for Permanent Magnet Synchronous Motor Servo Drive[C]//Pro⁃ceedings of the 2011 Chinese Control and Decision Confer⁃ence(CCDC).Suzhou,China:CCDC,2011:122-126.
[12]张晓光,赵克,孙力,等.永磁同步电机滑模变结构调速系统动态品质控制[J].中国电机工程学报,2011,31(15):47-52.
Research on Direct Torque Control Based on the Sliding Mode Strategy
YUAN Wei⁃hua,PAN Feng,LU Yao
(School of Electronic Information Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,Shanxi,China)
To solve those problems associated with conventional direct torque control(DTC)of permanent magnet synchronous motor(PMSM),such as high flux and torque ripple,inverter switching frequency instability,a new direct torque control strategy of variable structure sliding mode(VSS)was proposed.First,two hysteresis regulators in the conventional DTC system were substituted by the flux and torque VSS controllers respectively.Second,a simulation experiment was carried out through the Matlab/Simulink simulation software.Simulation results show that the control strategy not only can reduce the flux and torque ripple greatly but also has stronger robust to motor parameter and disturbance.
direct torque control(DTC);permanent magnet synchronous motor(PMSM);sliding mode variable structure;hysteresis regulator
TM341
A
2014-09-25
修改稿日期:2015-02-04
苑伟华(1988-),女,在读硕士研究生,Email:yanmao168@163.com
猜你喜欢
防爆电机(2020年6期)2020-12-14
农业机械学报(2020年2期)2020-03-09
中华建设(2019年7期)2019-08-27
光学精密工程(2016年3期)2016-11-07
项目管理技术(2016年12期)2016-06-15
西南交通大学学报(2016年6期)2016-05-04
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年17期)2014-04-04