小型化MEMS陀螺仪标定平台的设计
2015-07-18 11:44:47侯为萍
电子工业专用设备 2015年2期
侯为萍,孙 敏
(中国电子科技集团公司第四十五研究所,北京101601)
小型化MEMS陀螺仪标定平台的设计
侯为萍,孙 敏
(中国电子科技集团公司第四十五研究所,北京101601)
基于角速率转台体积大、结构复杂、标定范围小、移动性差等现状,设计了一种标定范围广的小型化MEMS陀螺仪标定设备,在此基础上提出了一种角速度积分标定方法,通过将陀螺仪电压信号积分值与实际转动角度进行线性拟合,从而求得陀螺的标度因数。实验表明,该系统标定原理简单可靠,并且标定精度取决于角位置精度和角位移量,降低了对角速度精度的要求,从而大大减小了设备体积和设计难度。
MEMS陀螺仪;标定设备;标度因数;伺服系统
MEMS陀螺仪由于具有体积小、可靠性高、抗冲击能力强、测量范围大的优点,在空间小、环境恶劣、角速度变化范围大、精度要求不高的场合得到广泛应用[1,2]。作为MEMS陀螺仪的主要标定设备,高精度速率转台能提供高精度的角速度、角加速度、角位置信息,但是由于体积大、结构复杂、价格高、速率范围小,限制了其在某些特殊要求场合的应用[3]。
针对以上问题,设计了一种小型化MEMS陀螺仪标定平台,并提出了一种基于该标定平台的新型标定方法,该方法的基本原理是:陀螺仪的角速度信息积分与标定平台的角位置是一致的,通过获取标定平台的角位置信息和时间,就可以对陀螺仪的标度因数进行标定,从而降低了对标定设备的转速精度要求,有利于降低标定设备的体积和成本。
1 小型化标定平台
小型化MEMS陀螺仪标定平台主要分为三部分,即底座、伺服系统和标定台,如图1所示。底座为整个系统提供支撑作用,通过通孔可以方便地固定到平台上;伺服系统是整个系统的执行机构,可以带动标定台以某一角速度转动精确的角位置;标定台上有固定尺寸的螺纹孔,为标定器件提供安装平台。
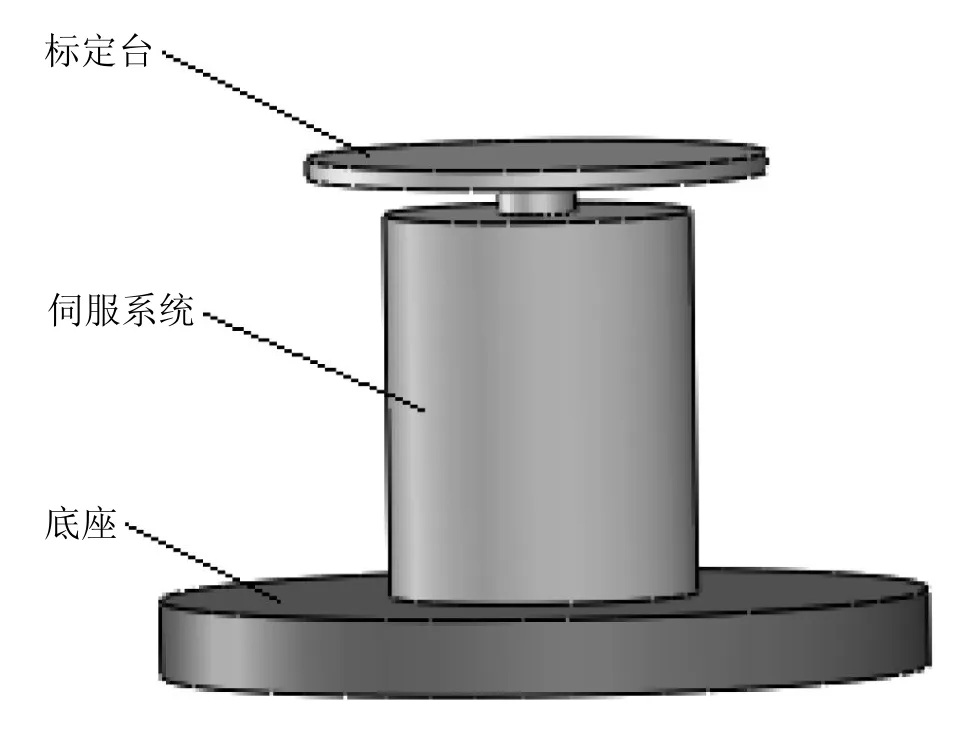
图1 平台结构图
2 平台系统组件介绍
2.1 伺服系统
该设计所用的是无刷直流伺服控制系统,其额定功率为100 W,转速精度为0.1%,位置精度为0.088°,额定转速为3000 r/min,能标定大多数量程的陀螺仪。上位机能方便控制伺服系统的运动状态,反馈实时位置和速率信息,并且可以方便的编写运动控制程序,实现自动化传感器标定。
2.2 采集存储器
采集存储器以TMS320F2812为控制核心,控制ADS8365进行高精度的信号采集,并将采集到的数据存入FLASH中。由于该标定平台的标定原理基于陀螺仪的精确积分,所以通过定时器将采集存储器的采样频率定为10 kHz,即采样时间为0.1 ms[4]。
3 标定原理
3.1 MEMS陀螺仪通用标定原理
将MEMS陀螺仪固定在速率转台上,设定高精度速率转台绕陀螺仪轴向方向以速率方式运行,若陀螺仪的最大量程为ωmax,则角速度可在-ωmax~ωmax范围内等间隔选取13组(组数可根据具体需求适当改变),则MEMS陀螺仪会相应的输出13组电压值,通过将转速与电压值进行直线拟合,则可求出MEMS陀螺仪的标度因数和零点电压。但是由于MEMS陀螺仪零点电压受环境(特别是温度)的影响很大,所以在实际应用中,将静止环境下MEMS陀螺仪的输出电压值作为零点电压[5-7]。
3.2 小型化标定平台标定原理
用角速度对MEMS陀螺仪进行标定的前提是标定设备能输出精确的角速度,但是由于该小型化标定平台应用的无刷直流伺服控制系统的转速精度为0.1%,达不到标定设备的精度要求,所以设计了应用陀螺仪积分信息进行标定的方法,该方法的基本原理为:
在静止环境下测量陀螺仪的零点电压值u0,设置电机以角速度ω1转动角度θ1,若耗时为t1(s),由于采集存储器的采样频率为10 kHz,采样间隔时间T为0.0001 s,则该段时间内陀螺仪的输出的离散电压值为u1,u2……ut1×10000。设定陀螺仪的标度因数为k1[V/(°/s)],则t1时间内陀螺仪测量出转过的角度θ~1满足式1。
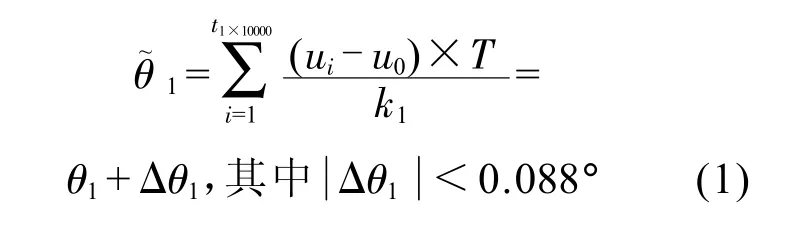
由式1可求得MEMS陀螺仪在ω1处的标度因数k1,如式2所示:
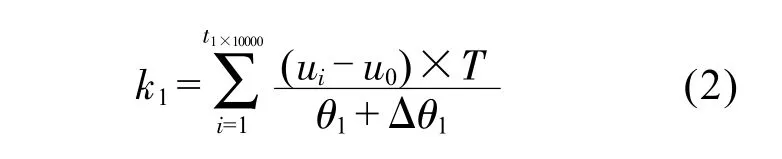
由式2可看出,标度因数k1的精度不取决于伺服系统的转速精度,只与单位时间内的角增量和伺服系统的位置精度有关。但是由于电机位置精度的限制,陀螺仪积分得到的角度值与设定的角度值之间存在角度误差Δθ1,可以通过增加转过的角度θ1(即增加转动时间t1)来减小Δθ1对标度因数的影响。
根据以上标定原理,可在 -ωmax~ωmax范围内等间隔选取13组角速度ω1,ω2……ω23,设定转过的角度依次是θ1,θ2……θ23,则可求出不同转速下的标度因数 k1,k2……k23。通过将标度因数与转速进行线性拟合便可得出陀螺仪的标度因数。
4 实验验证
以7 200°/s量程的MEMS陀螺仪为例,转台分别以角速度7 200°/s、6 000°/s、4 800°/s、3 600°/s、2 400°/s、1 200°/s、0°/s、-1 200°/s、-2 400°/s、-3 600°/s、-4 800°/s、-6 000°/s、-7 200°/s带动MEMS陀螺仪转动,每个转速转动约10 s,原始电压值如图2所示。
由图中可看出,陀螺仪有13段时间处于静止状态,对这些时间段内电压值取平均值,便可得陀螺仪在当前环境下的零点电压,经过求取可得该值为2.498 340 V。根据式(2)可求得不同转速下的标度因数k1,k2……k13,标度因数随转速的变化见图3所示。
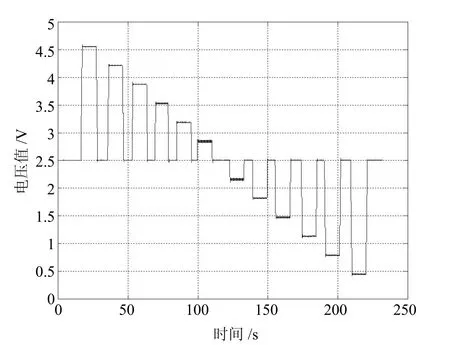
图2 原始电压值
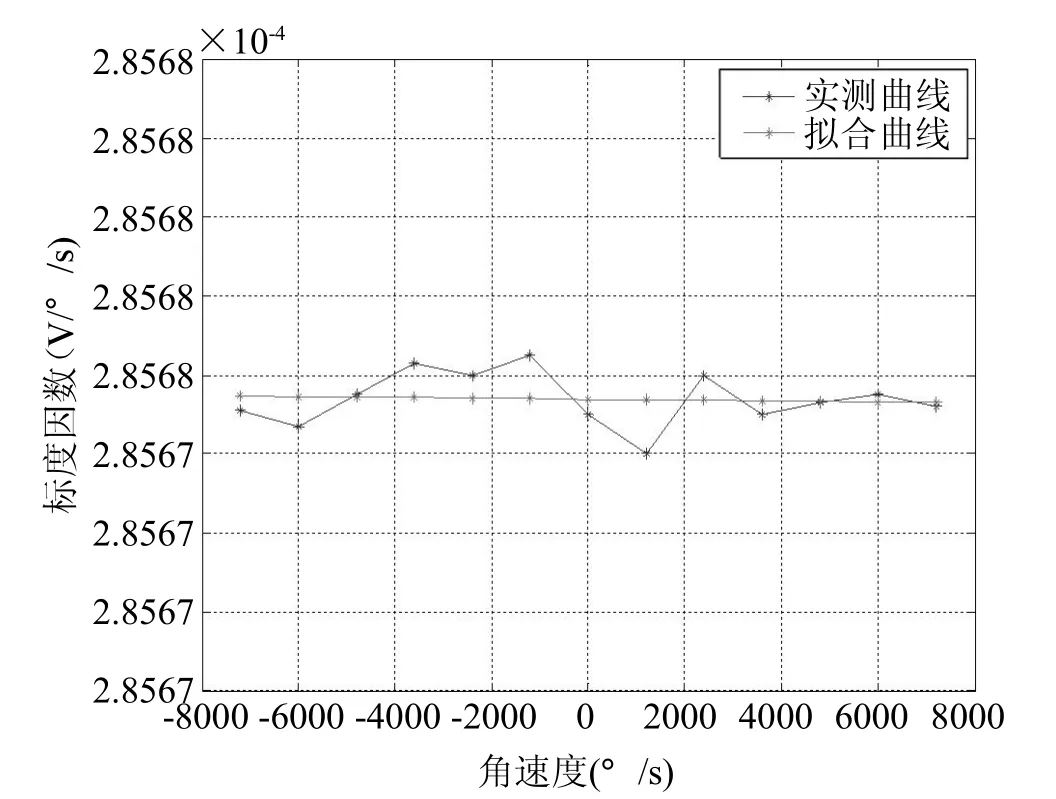
图3 标度因数随转速的变化
从图3中可看出,不同转速下的陀螺标度因数在很小的范围内存在一定的波动,即陀螺的非线性度。通过线性拟合后,求得该MEMS陀螺仪的标度因数为0.000 285 675 V/(°/s)。
5 结论
本文介绍了一种体积小,结构简单,便于移动,标定范围广,性价比高的MEMS陀螺仪标定设备,在此基础上提出了一种角速度积分标定方法,从理论分析角度验证了其正确性,并经过试验验证了该方法的可行性。该设计为MEMS陀螺仪的标定提供了新的方法,具有一定的工程应用价值。
[1] 陈旭光,杨平,陈意.MEMS陀螺仪零位误差分析与处理[J].传感技术学报,2012,25(5):628-632.
[2] 谷庆红.微机械陀螺仪的研制现状[J].中国惯性技术学报,2004,11(5):67-72.
[3] 叶辉.高平稳低速率转台测角系统的设计和研究[D].哈尔滨:哈尔滨工业大学,2006.
[4] 杨磊,崔敏,马铁华等.基于TMS320F2812的数据采集和处理的系统设计[J].电子测试,2011(9):50-53.
[5] 李杰,洪惠惠,张文栋.MEMS微惯性测量组合标定技术研究[J].传感技术学报,2008,21(7):1169-1173.
[6] 彭孝东,陈瑜,李继宇,等.MEMS三轴数字陀螺仪标定方法研究[J].传感器与微系统,2013,32(6):63-65.
[7] 党建军,罗建军,万彦辉.基于单轴速率转台的捷联惯测组合标定方法[J].航空学报,2010,31(4):1164-1168.
The Design of Miniature Calibration Platform for MEMS Gyroscope
HOU Weiping,SUN Min
(The 45thInstitute of CECT,Bejing 101601,China)
Based on the fact that rate turn table has disadvantages of big volume,complicate structure,limited range and mobility,designed a high-ranged miniature calibration device for MEMS gyroscope,and then put forward a new calibration method of rate integration,which obtains the scale factor of gyroscope by linear fitting the integral voltage value of it and the angular displacement information from turn table.Experiments show that this calibration method is simple and reliable and the calibration accuracy depends on angular position precision and angular displacement more than rate accuracy,decreasing the design requirement and volume.
MEMS gyroscope;Calibration equipment;Scale factor;Servo system
TN305
A
1004-4507(2015)02-0004-04
侯为萍(1983-),女,工程师,硕士学位,主要从事电子专用设备的软件研发工作。
2015-01-08
猜你喜欢
玉溪师范学院学报(2023年3期)2023-08-31 14:11:56
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
河北工业大学学报(2016年6期)2016-04-16 02:54:19
中国卫生(2014年7期)2014-11-10 02:33:02
技术经济(2014年10期)2014-02-28 01:30:01
汽车与新动力(2012年5期)2012-03-25 10:09:40
汽车与新动力(2012年2期)2012-03-25 10:09:28