TRUM相移PWM信号控制器的研究与设计
2015-07-18 12:05董砚李国庆荆锴石乐乐
河北工业大学学报 2015年6期
董砚,李国庆,荆锴,石乐乐
(1.河北工业大学控制科学与工程学院,天津 300130;2.河北工业大学河北省控制工程技术研究中心,天津 300130)
TRUM相移PWM信号控制器的研究与设计
董砚1,2,李国庆1,2,荆锴1,2,石乐乐1,2
(1.河北工业大学控制科学与工程学院,天津 300130;2.河北工业大学河北省控制工程技术研究中心,天津 300130)
针对行波型旋转超声波电机(TRUM)设计了一种用于两相H桥驱动电路的相移PWM信号控制器.控制器以CPLD和HIP4081A为核心,通过逻辑运算,辅以信号、电平处理电路,获得频率、相位可控的PWM信号,分别在硬件电路和软件设计算法中做了相应的改进,提高了软件资源利用率,实现了TRUM两相H桥驱动电路的控制.并从驱动电压能量利用率的角度,分析了PWM信号相位差与输出电压的关系,为控制器参数设置提供了理论依据.最后,通过实验验证了所设计控制器控制下的H桥驱动电路输出电压的性能,输出电压能满足电机的驱动要求.
TRUM;H桥驱动电路;HIP4081A;PWM信号控制;CPLD
0 引言
行波型旋转超声波电机(Travelling-wave Rotation Ultrasonic Motor,TRUM)是一种应用广泛的超声波电机.不同于传统的电磁电机,这类电机依靠压电陶瓷激发定子弹性体的高频微幅振动,依靠摩擦来驱动转子[1].这一类电机具有低噪声运行、转矩密度大、瞬态响应快、无电磁干扰、位置分辨率高等特点,在高端精密运动控制中应用前景广阔[2].因TRUM需要两相互差90°的高频正弦电压进行驱动,驱动电路的性能直接影响电机整体的控制性能.H桥式驱动电路在输出效率、电压谐波、机端电压线性度等方面将优于应用较为广泛的推挽式电路[3-4].但是,受电路结构的约束以及驱动电路对控制信号的要求较高,目前的H桥PWM信号控制器存在硬件电路结构较复杂及软件资源占用量大等问题,且输出电压频率、相位不易调节,影响TRUM控制的灵活性和效率[5-6].因此本文提出一种相移PWM信号控制器,将利用CPLD工作速度快,开发效率高,成本低,可靠性好的特点[7],以简单的软件逻辑结构,辅以HIP4081A为核心的信号、电平处理电路,来实现两相H桥PWM控制信号的输出及频率、相位的可控.文中还将利用能量利用率理论分析了PWM信号相位差对输出电压的影响,为控制器参数选择提供理论依据.最后,通过实验对所设计的PWM信号控制器进行测试,根据输出TRUM的驱动电压来验证控制器的性能.
1 PWM信号控制电路硬件的改进
图1所示为TRUM H桥驱动控制电路的基本结构框图,图中功率MOSFET开关器件M1~M8分2组构成2个H桥,分别对于电机的A、B两相,在8路PWM控制信号PWM 1、PWM 2、…、PWM 8的控制下,将直流电转化为互差90°的两相高频方波驱动电压u0,再通过升压变压器TA、TB升压,利用串联匹配电感和超声波电机中的容性压电陶瓷片所构成的LC谐振电路,LC谐振电路的第1个作用是滤除3次以上谐波,第2个作用是实现2次升压,并使得电机端的电压近似正弦波.
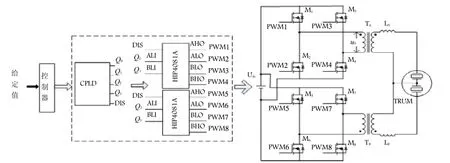
图1 TRUM H桥驱动控制电路结构图Fig.1 Structure of TRUM's control circuit drived by H bridge
输出8路PWM信号,通常直接由CPLD通过逻辑程序得到,并结合特定的驱动电路实现对H桥的控制.而本文在CPLD的基础上选用了2个HIP4081A构成两相H桥驱动辅助电路.对于每相电路,由CPLD输出2路PWM控制信号,自动产生1个H桥的4路控制信号.其中针对上桥臂由自举电路拉高栅源电压,保证上桥臂的正常开关,其内部结构还包含1组桥臂死区时间的硬件设置.于是,只需要CPLD提供Q0Q34路PWM信号即可实现对两相H桥电路的控制.
如图2,以A相H桥为例,供给HIP4081A的2路PWM信号Q0、Q1与H桥上桥臂所需信号相同,即PWM 1和PWM 3,如图2所示,为2个信号的相位差,决定了输出方波电压的占空比.B相同理,其与A相互差90°.
此外HIP4081A具有能控制所有输入的禁止端DIS,该引脚为1时为禁止,为0时为使能,可以实现电机停车的即时控制,以及与外接元器件组成保护电路.
综上所述,基于HIP4081A的改进型PWM信号控制器使得硬件结构设计简单,还减少了软件设计的复杂程度,使得资源利用率更高.
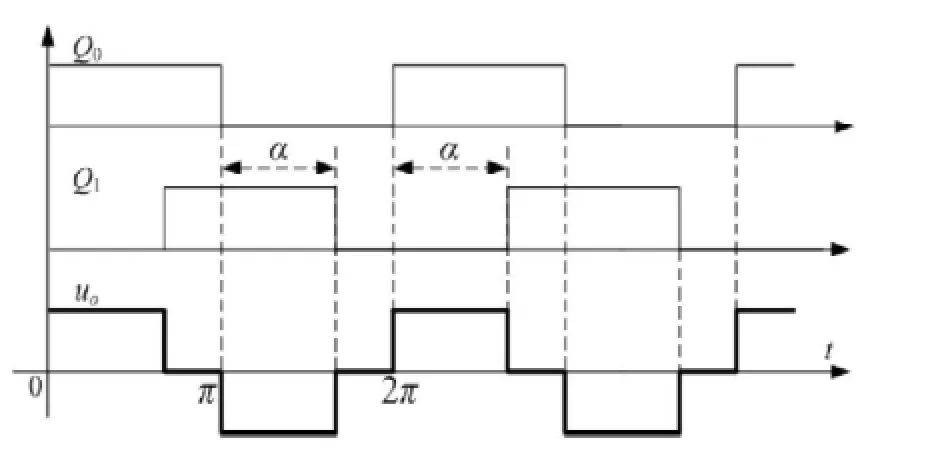
图2 相移PWM控制信号示意图Fig.2 Schematic diagram of phase shift PWM signal
2 半周期计数比较多PWM信号控制逻辑的设计
实现图1中供给HIP4081A的4路频率可控但存在相位差的PWM信号,本文将采用一种资源占用量较少的方法来实现,其CPLD结构如图3所示.
通常采用计数器和加法器来实现,计数器从0开始计数,且需要计满1个周期,计数器的值才能清零,再将计数器的计数值与偏移量作为加法器的输入,通过加法器的加法运算之后,将加法器输出的最高位(MSB)作为两相H桥4个上桥臂开关器件的PWM控制信号,又因上、下桥臂开关器件的PWM信号互补,还需要对MSB信号取非,进而得到8路PWM信号.
而本文在CPLD中设计一个N位的可控单增计数器,计数动作以外部时钟clk上升沿触发,计数器的计数值只要达到上限值设为max就可以清零,且max可调,计数器的上限值对应PWM信号的半个周期,通过调整计数器的上限值max,可以灵活地实现调频功能;然后将计数数值cnt送入4个N位比较器,分别与设定的4个偏移量pi(i=0,1,…,3, pi<max)比较,当cnt=pi时,令输出信号Qi翻转,即逻辑“0”变换为逻辑“1”,逻辑“1”变换为逻辑“0”.这样,计数器每从0计满max,这1个周期内4路信号Qi均将在固定的计数值处执行1次翻转,如图4所示,于是产生4路占空比为50%的方波信号,其相位由偏移量以及Qi的设定初值决定,因此可以方便地调节相位差.其中Qi的频率取决于时钟频率fclk以及计数上限max:
上述可调参数,如计数上限max、4个偏移量pi以及Qi初值均由前一级控制器通过数据总线给定,存于寄存器中,或直接在CPLD中设定.如果Q3Q2Q1Q0取4'b0101,p0=p1=0,p2=p3=max/2,得到=,A相超前B相90°的输出电压;如果Q3Q2Q1Q0取4'b1001,偏移量与p1上相同,则B相超前A相,电机相对前者反向旋转,实现电机的正反转.
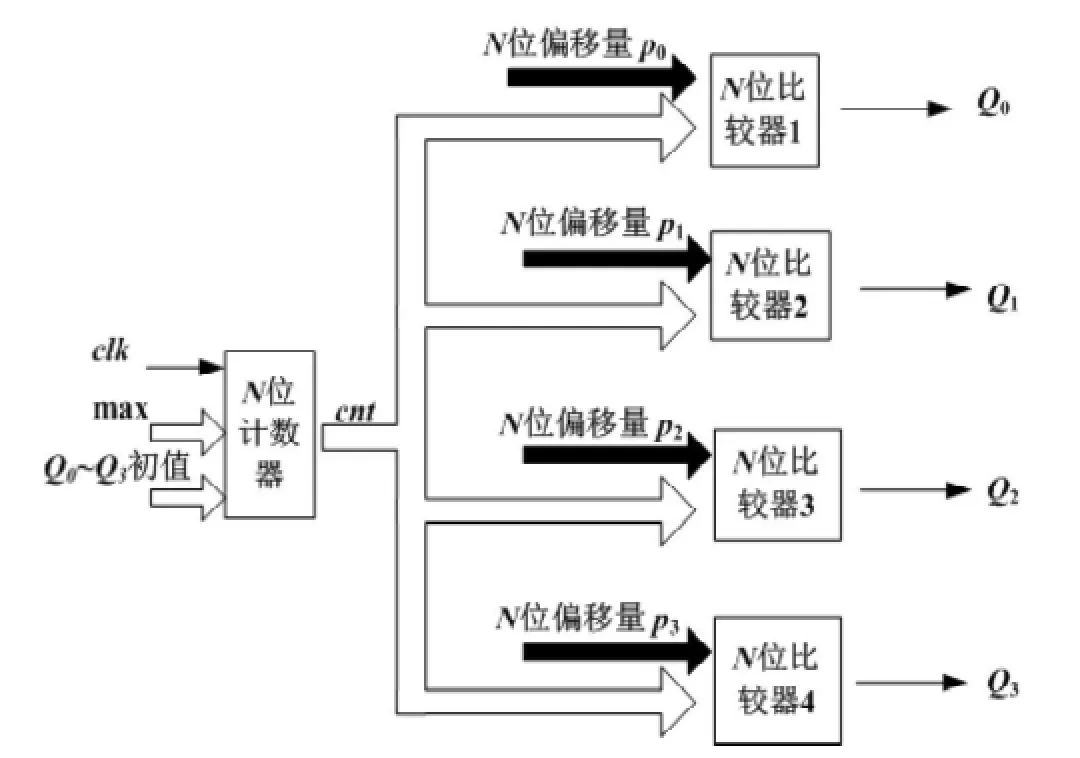
图3 相移PWM信号生成的CPLD逻辑框图Fig.3 Logic block of CPLD for generating the phase shift PWM signal
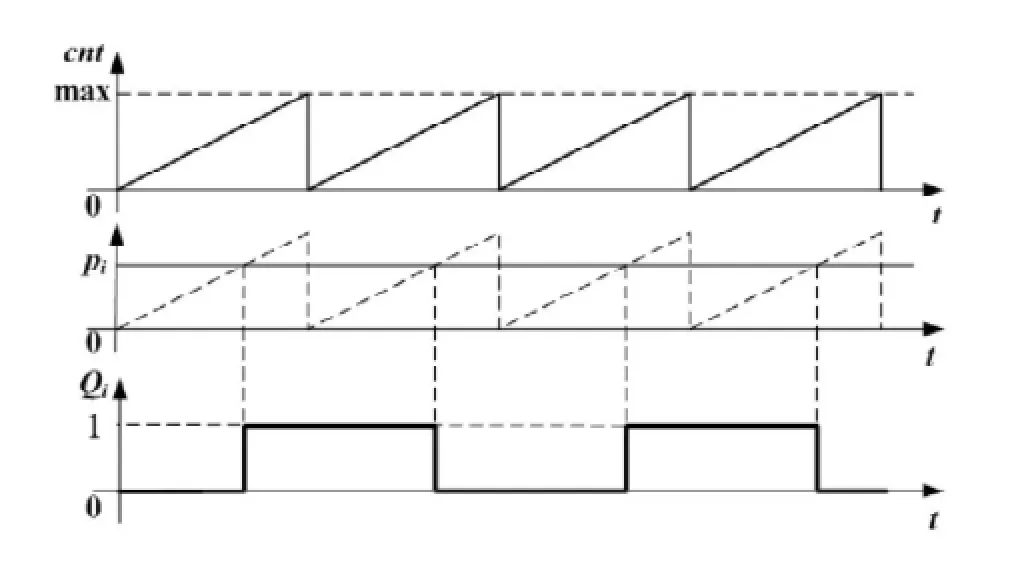
图4 信号发生器波形示意图Fig.4 Schematic of square wave generation
通过采用硬件描述语言(Verilog HDL)并在Quartus II环境下调用第3方软件Modelsim进行逻辑仿真,得到所需的4路PWM信号.
4路PWM信号仿真结果如图5所示,PWM信号频率为41.1 kHZ,当电机处于正转状态时,偏移量的设置分别为p0=0,p1=0,p2=238,p3=238,相位差为,当电机处于反转状态时,偏移量的设置分别为p0=0,p1=180,p2=243,p3=423,相位差可调节为0.8.
改进之后的算法,不仅能够灵活地实现调频调相的功能,还可以实现电机的正反转同时结合改进的硬件电路可知,只需要CPLD产生4路可调频、调相的PWM信号即可,减少了开发成本,提高了软件资源的利用率.
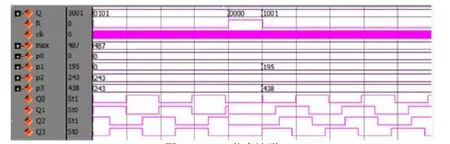
图5 CPLD仿真波形Fig.5 Simulation waveforms of CPLD
3 能量利用率最优的相移PWM信号
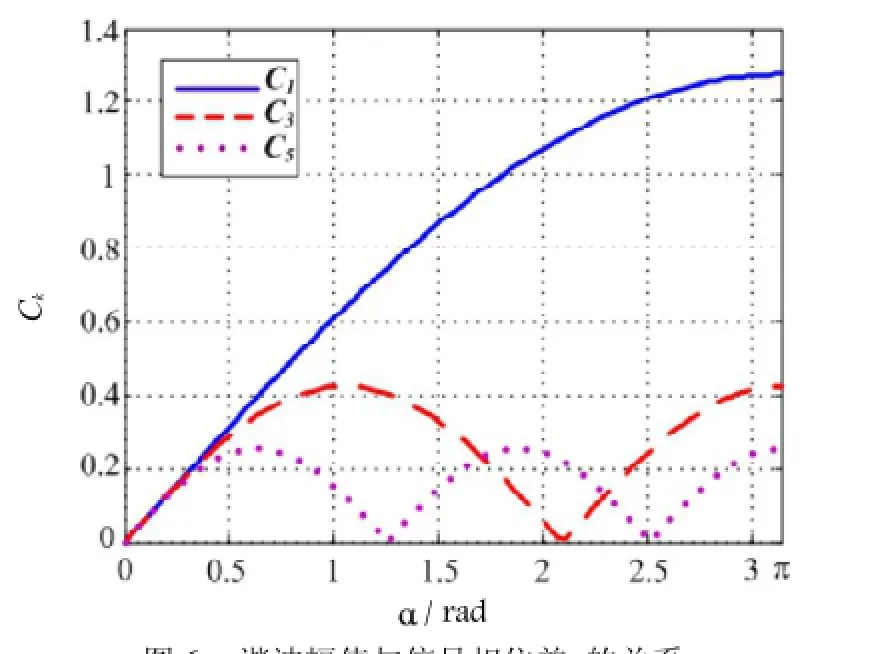
图6 谐波幅值与信号相位差的关系Fig.6 Relationship between harmonic amplitude and signal phase
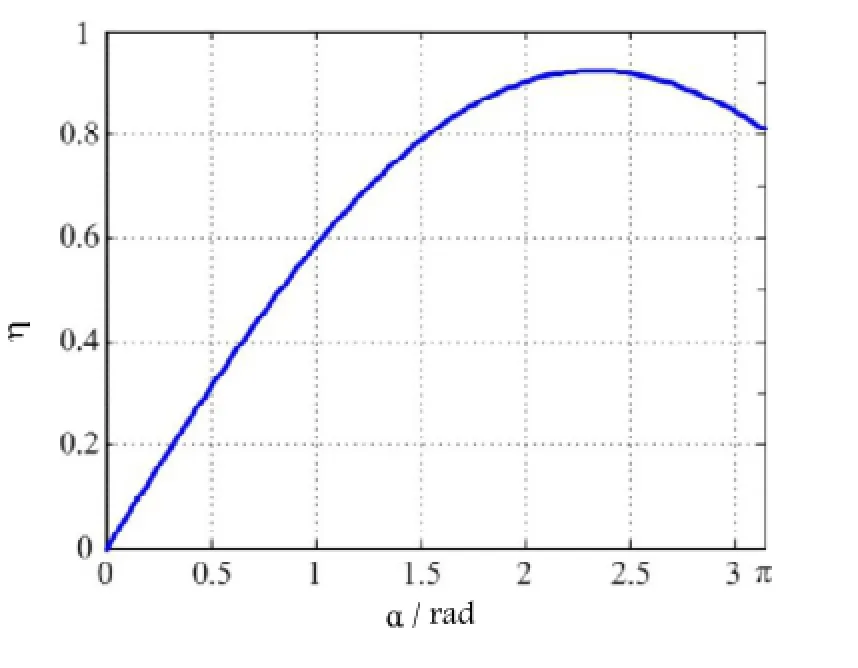
图7 能量利用率与信号相位差的关系Fig.7 Relationship between energy efficiency and signal phase
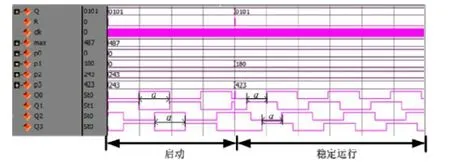
图8 CPLD仿真波形Fig.8 Simulation waveforms of CPLD



4 实验测试
本文以TRUM 60-A型行波型旋转超声波电机为对象进行了实验,PWM控制器的外部时钟40 MHz,H桥直流母线电压24 V.
图9为A相方波电压(变压器输出端)以及A相机端电压的实测波形,频率为41 kHz,变压器变比为1: 6,使电压峰值升到-144 V~144 V左右,再经LC谐振升压,得到标准的正弦波驱动电压,最大值可达240 V.
通过设置合适的4路偏移量,由CPLD输出PWM信号控制H桥电路,从而驱动电机运行.实验结果如图10为A、B两相驱动正弦电压波形,频率为41 kHz,A、B两相相位差90°,最大值均为240 V,满足驱动超声波电机的电压条件.
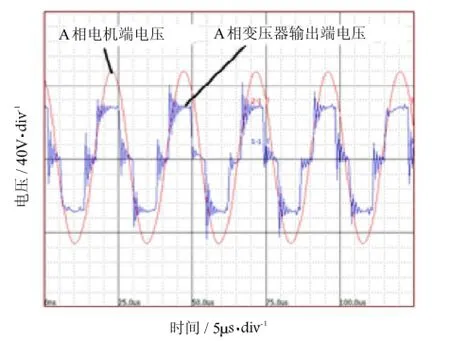
图9 A相电机端电压及A相变压器输出端实测波形Fig.9 A-phase voltage waveforms
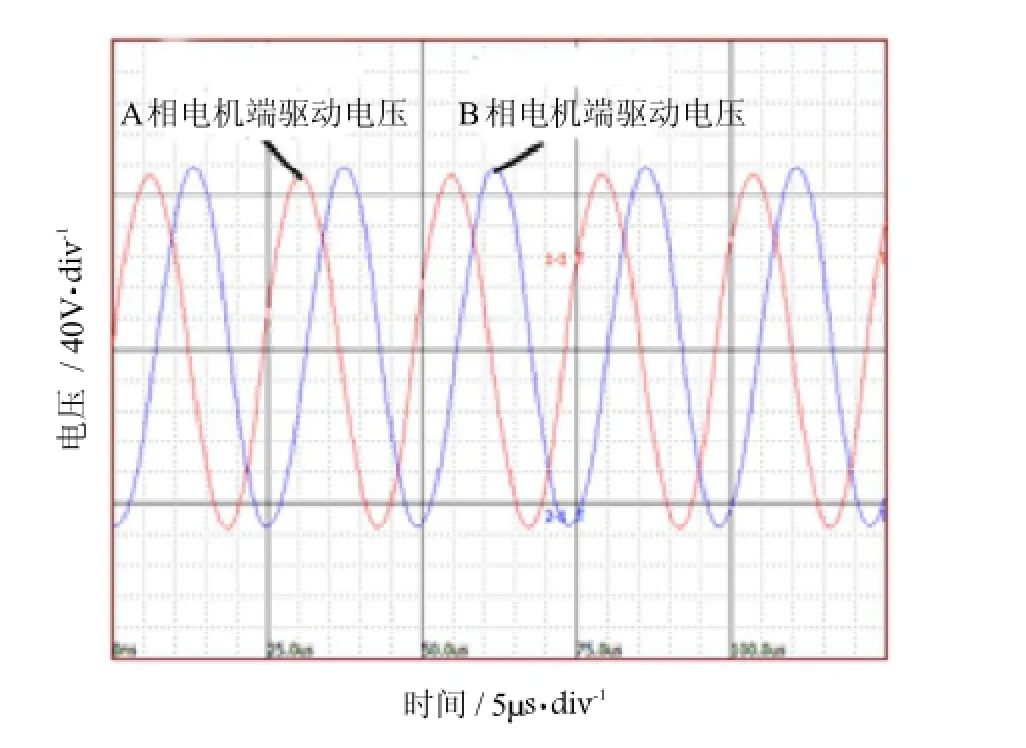
图10 两相电机端驱动电压波形Fig.10 D riving voltage waveform s of the two phases
5 结论
本文基于CPLD和HIP4081A设计了一种TRUM相移H桥PWM信号控制器,利用逻辑运算,得到频率、相位可控的PWM信号.分别在硬件电路和软件设计算法中作了相应的改进,提高了软件资源利用率,实现了TRUM两相H桥驱动电路的控制.文中还根据能量利用率分析了单相PWM信号相位差对输出驱动电压的影响,为控制器设置合适的相位差提供了依据.实验结果表明,控制器实现了对H桥输出电压的灵活控制,验证了该信号控制器的实用性.
[1]胡敏强,金龙,顾菊萍.超声波电机原理与设计[M].北京:科学出版社,2007:161-200.
[2]夏长亮,郑尧,史婷娜.行波接触型超声波电机定子振动有限元分析[J].中国电机工程学报,2001,21(2):26-32.
[3]Zhang Chunyang,Shi Jingzhuo,Liu Bo.Analysis of the push convertor used in ultrasonic motor drive[C]//Industrial Electronics,2009.ISIE 2009.IEEE International Symposium on,2009:843-846.
[4]W ang Guangqing,Bao Peng.Development of the driving circuit for traveling wave rotary ultrasonic paper[C]//Control Engineering and CommunicationTechnonlgy(ICECT),2012 International Conference on.IEEE,2012:512-515.
[5]颜佳佳,阮新波,李华峰.超声电机的软开关驱动电路[J].中国电机工程学报,2009,29(3):109-114.
[6]M cGrath B P,Holmes D G,Kong W Y.A decentralized controller architecture for a cascaded H-bridge multilevel converter[J].IEEE transactions on industrial electronics,2014,61(3):1169-1178.
[7]张长勇,孙毅刚,李志刚.基于DSP+CPLD的多路PWM发生器的设计[J].河北工业大学学报,2009,38(1):61-66.
[8]李华峰,赵淳生.基于复杂可编程逻辑器件的超声电机小型电源[J].中国电机工程学报,2005,25(7):115-118.
A research and design of phase-shifting PWM signal controller for TRUM
DONG Yan1,2,LI Guoqing1,2,JING Kai1,2,SHI Lele1,2
(1.School of Control Science and Engineering,Hebei University of Technology,Tianjin 300130,China;2.Hebei Control Engineering Technology Research Center,Hebei University of Technology,Tianjin 300130,China)
In this paper,a new phase-shift pulse-width modulation(PWM)controller for two-phase H-bridge driving circuit of the traveling w ave type rotary ultrasonic motor(TRUM)has been designed.The controller,w hich is based on com plex programmable logic device(CPLD)and HIP4081A,w ill generate the PWM signals w ith controllable frequency and phase for the two-phase H-bridge of TRUM,which is designed through simp le signal logic operation and supp lemented by signal processing and level translating peripheral circuit.The software resource utilization is improved by modified hardw are circuit and control algorithm.The relationship between phase difference of the PWM signal and the output voltage of the H-bridge has been analyzed to be a theoretical basis for parameter setting by energy efficiency. Finally,under the control of the designed controller,the output voltage of the H-bridge driving circuit is verified by experiments,which meets the demands of the motor driving.
TRUM;H-bridge driving circuit;HIP4081A;PWM signal control;CPLD
TM 921.51
A
1007-2373(2015)06-0007-05
10.14081/j.cnki.hgdxb.2015.06.002
2015-03-15
河北省重大科技成果转化项目(13041709Z);河北省自然科学基金(E2013202108);河北省发改委项目(2013)
董砚(1973-),女(汉族),教授,博士生导师.
数字出版日期:2015-11-24数字出版网址:http://www.cnki.net/kcms/detail/13.1208.T.20151124.0905.006.htm l
猜你喜欢
地理空间信息(2022年3期)2022-04-01
煤气与热力(2022年2期)2022-03-09
湖北师范大学学报(自然科学版)(2020年2期)2020-06-30
中国煤炭(2020年2期)2020-01-21
中国化肥信息(2019年6期)2019-01-19
自然资源遥感(2018年3期)2018-09-04
消费导刊(2017年24期)2018-01-31
制造技术与机床(2017年7期)2018-01-19
湖南工业职业技术学院学报(2017年3期)2017-07-18
科技创新与应用(2016年7期)2016-10-21