一种用于PD体制频率捷变雷达的解模糊方法
2015-07-16 16:39张森
科技资讯 2015年6期
张森

摘 要:基于目标的径向速度不随雷达工作频率的变化而改变这一特性,提出了一种适用于体制频率捷变雷达的滑窗查表搜索解模糊方法,仿真试验结果表明该方法能在存在较大视在距离和视在速度测量误差的条件下保证较高的解模糊正确率和较低的解模糊虚警率,且能适应波束内同时含有多个目标的情况,其运算量相对固定,具有较高的工程实用价值。
关键词:频率捷变 距离解模糊 速度解模糊
中图分类号:TN958.6 文献标识码:A 文章编号:1672-3791(2015)02(c)-0004-02
现代的雷达所采用的脉冲重复频率()范围从几百赫兹到几十千赫兹,甚至更高,这将导致雷达经常出现距离模糊、速度模糊或距离和速度同时模糊,因此,要获得目标的距离和速度就要进行距离和速度双解模糊。而雷达为应对频域上的瞄准式窄带干扰或宽带阻塞式干扰,往往会采用脉组间随机或自适应的频率捷变工作模式,这将导致常用的在多普勒频域内进行速度解模糊的算法失效[1]。针对这一情况,该文基于目标的径向速度不随雷达工作频率的变化而改变提出了一种在速度域上进行解模糊的方法。
1 解距离模糊
雷达目标回波因受到发射脉冲的遮挡,会产生距离遮挡,同时由于地杂波的影响需要将回波多普勒零频附近的信号挖除,会产生速度遮挡。为了避免模糊并消除由距离和速度遮挡而产生的盲区,一般采用多重的工作方式[2]。
假设雷达共有重,一旦选定,由此确定的非模糊距离单元为:
(1)
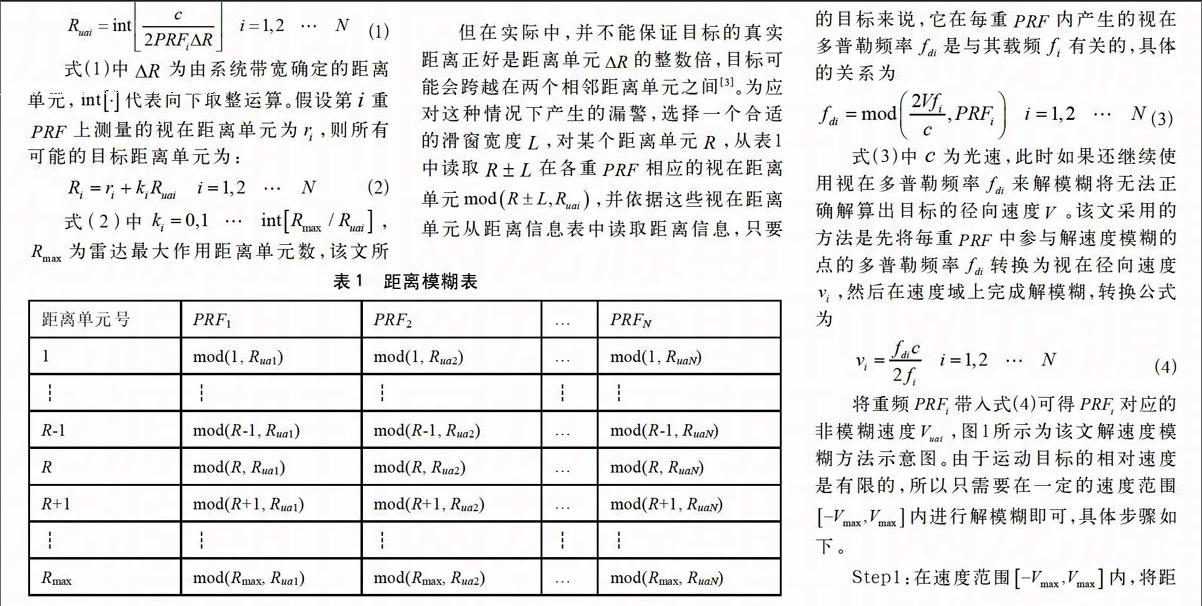
式(1)中为由系统带宽确定的距离单元,代表向下取整运算。假设第重上测量的视在距离单元为,则所有可能的目标距离单元为:
(2)
式(2)中,为雷达最大作用距离单元数,该文所述的解模糊方法为准则的滑窗查表搜索法,具体做法是先在1至之间以各重的非模糊距离单元建立距离模糊表,如表1所示。
表1中为求模运算,注意当求模运算的结果为0时,需要将0替换为相应的。将每个波位中各重恒虚警检测后过门限点的距离单元信息分别存储在一个维的距离信息表中,表中各重相应的距离单元如果有过门限的点则标记为1,反之标记为0。建表完毕后从距离单元1到依次对每个距离单元进行搜索,对某个距离单元,从表1中读取其在各重相应的视在距离单元,并依据这些视在距离单元从距离信息表中读取距离信息,将读取的结果相累加,如果累加结果达到或超过则判定当前搜索的距离单元解距离模糊成功,此时转入速度解模糊流程。当完成所有距离单元的搜索时,当前波位的距离解模糊过程即全部完成,将距离信息表清0,重复上述的解模糊过程。
但在实际中,并不能保证目标的真实距离正好是距离单元的整数倍,目标可能会跨越在两个相邻距离单元之间[3]。为应对这种情况下产生的漏警,选择一个合适的滑窗宽度,对某个距离单元,从表1中读取在各重相应的视在距离单元,并依据这些视在距离单元从距离信息表中读取距离信息,只要距离信息表每重的中有一个单元的值为1就判定该重发现目标,当发现目标的数达到或以上就判定当前搜索的距离单元解距离模糊成功。滑窗宽度的大小取决于距离单元尺寸和信噪比,因过大的会导致过多的虚警,通常只取1。该方法可能会导致同一个目标在连续个距离单元上均被解出,因此需要在搜索完所有距离单元之后对解算出的结果进行融合。具体的融合规则是对相邻距离单元的点,如果其速度差别在一定的容限内就认定为是同一个目标,此时应选择满足准则最多的点作为输出,如果满足准则数相同则选择解速度模糊时均方误差最小的点作为输出。
2 解速度模糊
通常的速度解模糊方法是直接在多普勒频域内进行的,但这对频率捷变体制的雷达是不可行的,因为当雷达进行频率捷变时,每重采用的载频是不同的,而对一个相对雷达波束径向速度为的目标来说,它在每重内产生的视在多普勒频率是与其载频有关的,具体的关系为
(3)
式(3)中为光速,此时如果还继续使用视在多普勒频率来解模糊将无法正确解算出目标的径向速度。该文采用的方法是先将每重中参与解速度模糊的点的多普勒频率转换为视在径向速度,然后在速度域上完成解模糊,转换公式为
(4)
将重频带入式(4)可得对应的非模糊速度,图1所示为该文解速度模糊方法示意图。由于运动目标的相对速度是有限的,所以只需要在一定的速度范围内进行解模糊即可,具体步骤如下。
Step1:在速度范围内,将距离解模糊成功后中的任意一个视在速度以进行周期拓展,得到与此视在速度对应的多个目标速度值。
(5)
式(5)中的是使在范围内的所有整数。
Step2:按顺序依次将所有分别进行求模运算,并以此为中心,以为速度误差容限检测各重内是否有在范围内的视在速度,如果有则认为该重上发现速度为的目标,当发现目标的数量达到或以上时就判定当前搜索的速度解速度模糊成功,此时应停止对剩余的再进行搜索并记录相应的均方误差。
(6)
式(6)中为重中发现目标的数量,为第重发现目标的中在范围内的视在速度。
Step3:依次将中满足距离解模糊的其他视在速度进行Step1和Step2。
Step4:依次将至分别进行Step1、Step2和Step3。
Step5:该方法会导致同一个目标的速度在多重上均被解出,因此需要在执行完以上4步之后对解算出的速度进行融合处理。具体的融合规则是如果其速度的差别在容限内就认为是同一个目标,此时应选择满足准则数最多的速度值作为输出,如果满足准则数相同则选择均方误差最小的速度值作为输出,如果均方误差也相同则选择其速度均值作为输出。
3 仿真分析
以5重为例,采用3/5准则,每重频对应的距离单元数分别取221、203、184、167、155,取75,取1,取2,取10000,取800,各的距离和速度遮挡比例分别取10%和14%,各的载频在范围3.5至3.7之间以5为间隔随机捷变频。
仿真时在各重内按10-2的虚警率加入虚假恒虚警过门限点,并在目标的视在距离和视在速度上加入服从无偏高斯分布的测量误差。图2和图3分别为波束内目标个数分别为4、8和15时采用该文方法进行200次解模糊所得的统计结果。
可以看出,在存在视在距离和视在速度测量误差的条件下,该文所述的解模糊方法能保证有较高的正确率和较低的虚警率,且能适应波束内含有多个目标的情况。
4 结语
该文详尽阐述了一种适用于体制频率捷变雷达的滑窗查表搜索解模糊方法,并进行了相应的计算机仿真。仿真结果表明该方法能在存在较大视在距离和视在速度测量误差的条件下保证较高的解模糊正确率和较低的解模糊虚警率,且能适应波束内同时含有多个目标的情况。
参考文献
[1] 吴顺君,梅晓春.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008:271-272.
[2] 王佳苗,杨菊,吴顺君.一种脉冲多普勒雷达解距离模糊的新算法[J].雷达与对抗,2005(3):38-41.
[3] Richards MA著,邢孟道等译.雷达信号处理基础[M].北京:电子工业出版社,2008:207-211.