
上下料机械手的液压系统设计
2015-07-16 11:18:26曾祥福张梦旖
山东工业技术 2015年18期
曾祥福,张 毅,张梦旖
(西京学院机械工程学院,西安 710123)
1 引言
工业机械手是近代机械自动控制领域中出现的一项技术,是在机械化、自动化生产过程中发展起来的一种新型装置,并已成为现代机械制造生产系统中的一个重要组成环节。机械手可以模仿人手和手臂的某些动作功能,按给定设计程序抓取、搬运工件与物品。主要由执行机构、驱动机构和控制系统三大部分组成,机械手按其用途可分为专用机械手和通用机械手两种,专用机械手的结构型式简单,无单独控制系统,只包含固定程序,适用于专机或大批量生产自动线作为自动上下料用。结合设计参数要求与实际零件生产线,设计成专用型机械手。
2 机械手的结构设计
本次机械手为固定式四自由度液压机械手,选用液压驱动系统作为动力源,主要由机身、手臂和手爪等主要部分组成。该机械手采用圆柱坐标式的坐标型式。
通过手爪的开合、手臂的升降与伸缩、机身的回转等连续姿态实现机械手的抓取/释放工件的动作,以及完成数控车床的自动上下料功能。手爪选用二指V型滑槽杠杆式结构,有利于抓取工件时对工件进行定心;手臂应用连杆形式,各连杆之间采用销钉方式进行连接;焊接支撑架是连接手臂与机械手机身的支撑环节,为手臂提供支撑作用,通过与机身进行螺钉连接的固定,机械手的一系列动作均由回转液压缸、升降液压缸、伸缩液压缸和手指液压缸来控制实现。
3 机械手总体系统的设计
考虑此次设计的机械手抓取重量较大(40kg),为得到较大的输出力和握力,同时使传动平稳,因此选用液压驱动作为机械手的控制系统。
3.1 液压系统的工作原理
液压系统以压力油液为工作介质,由电动机带动油泵输出压力油,将机械能转换成油液的压力能。压力油经管道及控制调节装置进入油缸,推动活塞杆运动,从而使机械手工作。液压机械手的其液压传动系统概括如图1。
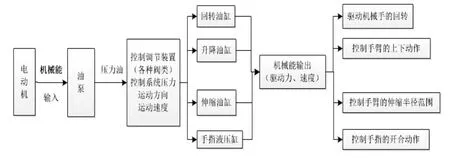
图1 液压传动系统
由图1可知,机械手液压系统由以下主要部分组成:
(1)油泵 它供给系统以压力油,将电动机的机械能转换为油液的压力能,并用以驱动整个液压系统工作;(2)执行油缸 压力油驱动运动机构对外工作部分。如:做回转运动的回转缸;(3)控制调节装置 如溢流阀、顺序阀等。在系统中控制机械手的动作与速度等功能,使机械手的手臂、手腕、手指等能够完成所需要运动;(4)辅助装置 如油箱、滤油器、蓄能器、管路和管接头以及压力表等。
3.2 液压传动机械手的特点
首先,控制精度高,上下料机械手需要对传送工件准确定位,液压传动具有体积小、惯性小等特点;其次,液压传动滞后现象小,反应灵敏,通过对液压调节,可以实现机械手的无极调速;再次,液压传动可以得到较大的输出力或力矩。
3.3 液压系统工作原理图
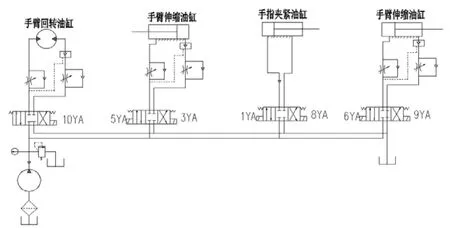
图2 液压系统工作原理图
其中,手臂伸缩油缸与手臂升降油缸在液压系统中同时动作,手臂回转油缸与手指加紧油缸依据设定程序动作,共同配合完成机械手上、下料动作。
4 机械手的动作顺序
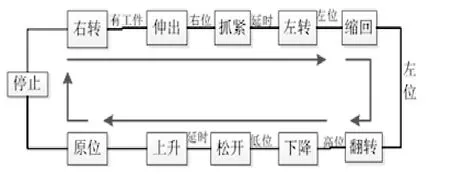
图3 工作流程简图
机械手的工作流程简图如图3。
根据机械手上述动作顺序,采用PLC电控系统控制相对应的换向电磁阀,按设计的程序逐步实现各动作。
5 总结
结合设计参数要求,在机械结构设计的基础上选择并完成机械手的液压系统设计,该系统能满足机械手的动作顺序与控制要求。
[1]姜佩东.液压与气动技术[M].北京:高等教育出版社,2009.
[2]孙恒,陈作模主编.机械原理第六版[M].高等教育出版社,2001.
[3]张钦国.基于液压驱动的四自由度机械手的运动仿真与优化[D].吉林大学,2011.
[4]夏家来,王玉斌.浅析液压系统的形式及评价[J].林业科技情报,2007(03).
[5]胡海洪.四自由度液压机械手液压系统设计[D].南昌大学.2012.
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
冶金设备(2020年2期)2020-12-28 00:15:26
今日农业(2020年14期)2020-12-14 19:47:34
重型机械(2020年2期)2020-07-24 08:16:20
金色少年(奇趣科普)(2016年8期)2016-09-21 02:07:58
我爱学(创意美术与手工)(2016年4期)2016-07-14 06:34:54
通信电源技术(2016年1期)2016-04-16 04:57:29
石油化工建设(2015年6期)2015-12-01 04:17:35
少儿科学周刊·少年版(2015年4期)2015-07-07 22:02:23
机电信息(2015年3期)2015-02-27 15:54:53
