
水下生产设备的钻杆无导向安装法的计算分析
2015-07-12 17:33,,,,,
中国海洋平台 2015年1期
, , , , ,
(1.海洋石油工程股份有限公司,天津 300451;2.浙江大学, 杭州 310058;3.宝鸡石油机械有限公司, 陕西 宝鸡 721002)
水下生产设备的钻杆无导向安装法的计算分析
付剑波1,陈斌1,张凡2,方伟1,白勇2,杨红刚3
(1.海洋石油工程股份有限公司,天津300451;2.浙江大学,杭州310058;3.宝鸡石油机械有限公司,陕西宝鸡721002)
该文介绍了水下生产设施的钻杆无导向安装法,阐述了此安装方法的施工步骤。根据安装的方法步骤对水下生产设备的钻杆无导向安装法的相关计算分析进行了研究,对安装过程中水下生产设备及钻杆所受的风力、波浪力及洋流力等进行了计算,确定了不同安装阶段的载荷情况和边界条件。通过有限元法建立了水下生产设备下放安装过程中钻杆的力学分析模型,模拟计算了安装过程中钻杆各节点的偏移量、剪力、弯矩值以及所受拉力。
水下生产设施;钻杆无导向安装;有限元;力学分析;数值模拟
FU Jian-bo1, CHEN Bin1, ZHANG Fan2, FANG Wei1,BAI Yong2, YANG Hong-gang3
0 引言
随着技术水平的不断发展及当今世界对能源的需求,海洋石油的开发已经逐渐走向深海水域,目前投产的海洋油井最大作业水深已经达到极深水域(水深大于1 500 m)。随着作业水深的增加,使用传统海洋平台开发的方法在经济性及工程可行性方面会大幅下降,而近年来发展的水下生产系统加浮式平台的开采模式已成为深海油气田开发的最主要模式之一。水下生产系统一般由水下井口、采油树、生产设备、跨接管、海底管线和立管等水下生产设备组成[1,2]。水下生产系统坐放在海底进行采油作业,这种方式能避开海面的极端环境,并且可以回接至海洋平台或岸基设施进行生产,但同时也对水下生产系统的安装作业提出了挑战。海上安装过程的受力情况复杂,过程中设备会受到风力、波浪力及洋流力的影响,并且还会受到安装船舶或平台运动的影响,在这些影响下,不但要保证施工的安全和设备结构的完整性,还要保证安装精度,确保水下生产系统安装到正确的位置。安装的计算分析及施工在水下生产系统中往往占有很大比例,也是水下生产系统在设计过程中需要考虑的重要因素。因此,全面掌握水下生产设施的安装对国内海洋石油开发有着重要意义。
1 安装方法步骤
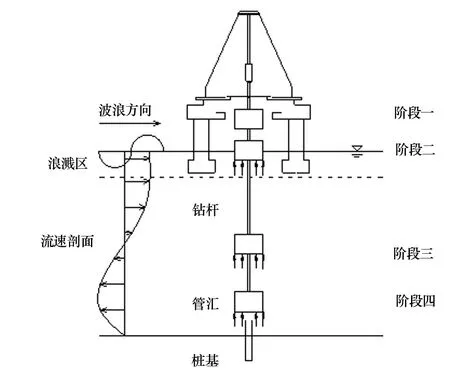
图1 安装的四个主要阶段示意图
水下生产设备的钻杆无导向安装大体分为四个阶段(如图1所示)。阶段一为水面上吊运与下放阶段,此阶段设备及钻杆只受风力作用;阶段二为设备未完全淹没阶段;阶段三为完全淹没阶段,此阶段设备及钻杆会受到波浪力和洋流力的作用;阶段四为坐放与连接阶段,此阶段除受环境因素影响外,还需要进行落地分析。由此可见,四个阶段的主要不同点在于受力情况,即结构的载荷不同,该文主要以第一阶段和第三阶段为例进行计算分析。
2 环境载荷计算
水下生产设备安装过程主要受到风、波浪、洋流三种环境载荷。水线面以上主要受风载荷的影响,水线面以下主要受到波浪载荷和洋流载荷的影响,并且随着水深的增加,波浪影响逐渐减小,洋流影响相对明显。由于波浪、洋流计算的相似性[3],该文将波浪、洋流一同分析,风荷载另行计算。
2.1风力的计算
当水下设备未浸入水中时,对于较大设备,风荷载对整体安装影响较大,而由于下放工具(钻杆)受力面积较小,因此受到风荷载作用可以忽略不计。当设备未浸入水中即风荷载可以直接作用于设备时,需要计算风荷载影响;当设备浸入水中后,即可忽略不计[4,5]。由风速产生的风压可按如下公式计算:
(1)
式中:ρ为空气质量密度,对干燥空气取1.225 kg/m3;νwind为在平均水位以上高度z处的平均风速。
垂直作用于构件轴线或其表面上的风力可按下式计算:

(2)
式中:C为性质系数,取值可参考文献[4];q为基本风压力,见公式(1);Ap为垂直于风力方向的构件投影面积;α为暴露的构件轴线或者表面与风向之间的夹角;φ为实体度,是垂直于风力方向上暴露实体的投影面积与框架边界所围投影面积的比值。
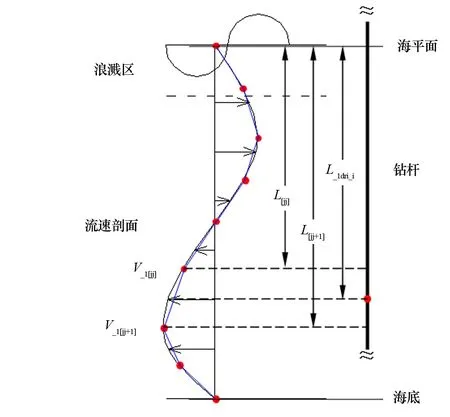
图2 洋流的数值模拟
2.2波浪及洋流载荷计算
在水下生产系统安装计算过程中,波浪、洋流对整个安装影响很大,根据参考文献[3],波浪力、洋流力作用采用莫里森方程,物体受到波浪、洋流的作用力为:
(3)
式中:FM为物体受到惯性力作用;FD为物体受到拖曳力作用。
惯性力作用于物体重心,计算如下:
(4)
式中:CM为惯性力系数;u为垂直于构件轴线的水质点与构件之间的相对速度(由波浪导致的相对于构件的速度)。
对于一般结构物,拖曳力作用于物体重心,采用下式计算:
(5)
式中:CD为垂直于构件轴线的流动拖曳力系数;Ap为在垂直于拖曳力方向上构件的投影面积;Us=u+ν,u为流体质点在垂直于构件轴线方向上相对于构件的速度(由流与波浪共同导致的相对于构件的速度),ν为垂直于构件轴线的水质点与构件之间的相对速度(由流导致的相对于构件的速度)。
对于单位长度细长结构拖曳力采用下式计算:
(6)
式中:D为细长结构横截面直径。
对于洋流的数值模拟及计算,该文采用多点线性连接法模拟真实的非线性洋流流速剖面(如图2所示)。计算过程中采用线性插值法来调用钻杆节点处的流速进行相关计算,见公式(7)。
(7)
式中:V为洋流流速;L为水深;L_dri_i为钻杆某节点处的水深。
3 安装过程中钻杆的受力分析

图3 阶段三受力分析图
对钻杆的分析采用有限元法,有限元法的基本思路是:将整体结构划分成多个单元体,单元体之间有节点相连,先求得每个节点的位移,然后根据位移和应力关系,可求得节点处应力[6]。
该文主要以第三阶段为例进行计算分析,第三阶段为从生产设备顶部完全淹没水面下开始,直至生产设备坐放至海底目标点上为止。由于随着下放水深的增加,钻杆顶端承受的轴力不断增加,因此生产设备下放到最大水深时,整个水下生产设备处于安装工程较危险的阶段,阶段三受力分析如图3所示。

假定生产设备受到的环境荷载作用于水下生产设备重心处,计算生产设备受到X轴方向上的环境荷载为:
(8)
式中:FD-man-x为X方向上生产设备受到的波浪、洋流的拖曳力;FM-man-x为X方向上生产设备受到波浪、洋流的惯性力。在计算过程中,Ap,XOZ=min{(ddri,n+hman)·lman,hman·lman}为在垂直于XOZ平面上构件的投影面积。
钻杆i单元受到X轴方向上的环境荷载为:
(9)
Fdri-x,i根据公式(3)、公式(4)、公式(6)可得。
对钻杆进行XOZ平面内的力学分析:
钻杆i单元自重可简化于重心:
(10)
结点i处受到X方向作用力:
(11)
结点i处受到Z方向作用力:
(12)
钻杆顶部与张紧器固接,故顶端边界条件为:
x(0)=0
钻杆末端通过吊索与生产设备连接,故可设为铰接,钻杆底端边界条件为:
Fz,n=Ftotal,Fx,n=Fman-x,Mx,n=0
局部坐标系中:
XI(0)=0
当n足够大时,忽略钻杆单元受到的水平作用力和自重产生的弯矩效应。
在XOZ平面内局部坐标系中i节点的弯矩方程为:


式中:(EI)i为第i段钻杆的弯曲刚度。
在原点OI处钻杆挠度为零,钻杆末端的弯矩为零,即节点n处的弯矩为零,故边界条件为:
XI(0)=0,MI,x(n)=0
式(13)、式(14)组成n元一次方程组,可解得各个节点在局部坐标系中的水平位移XI(1),XI(2),XI(3),…XI(n-3),XI(n-2),XI(n-1),XI(n)。
求得钻杆各个节点的弯矩为:
(15)
求得钻杆沿z轴各个节点的挠角为:
(16)
其中,i=0,1,2,3…n-3,n-2,n-1。
整体坐标系中,各个结点在X方向的位移为:
(17)
4 计算结果
依照该文的计算方法,求得钻杆的形变如下图4所示。
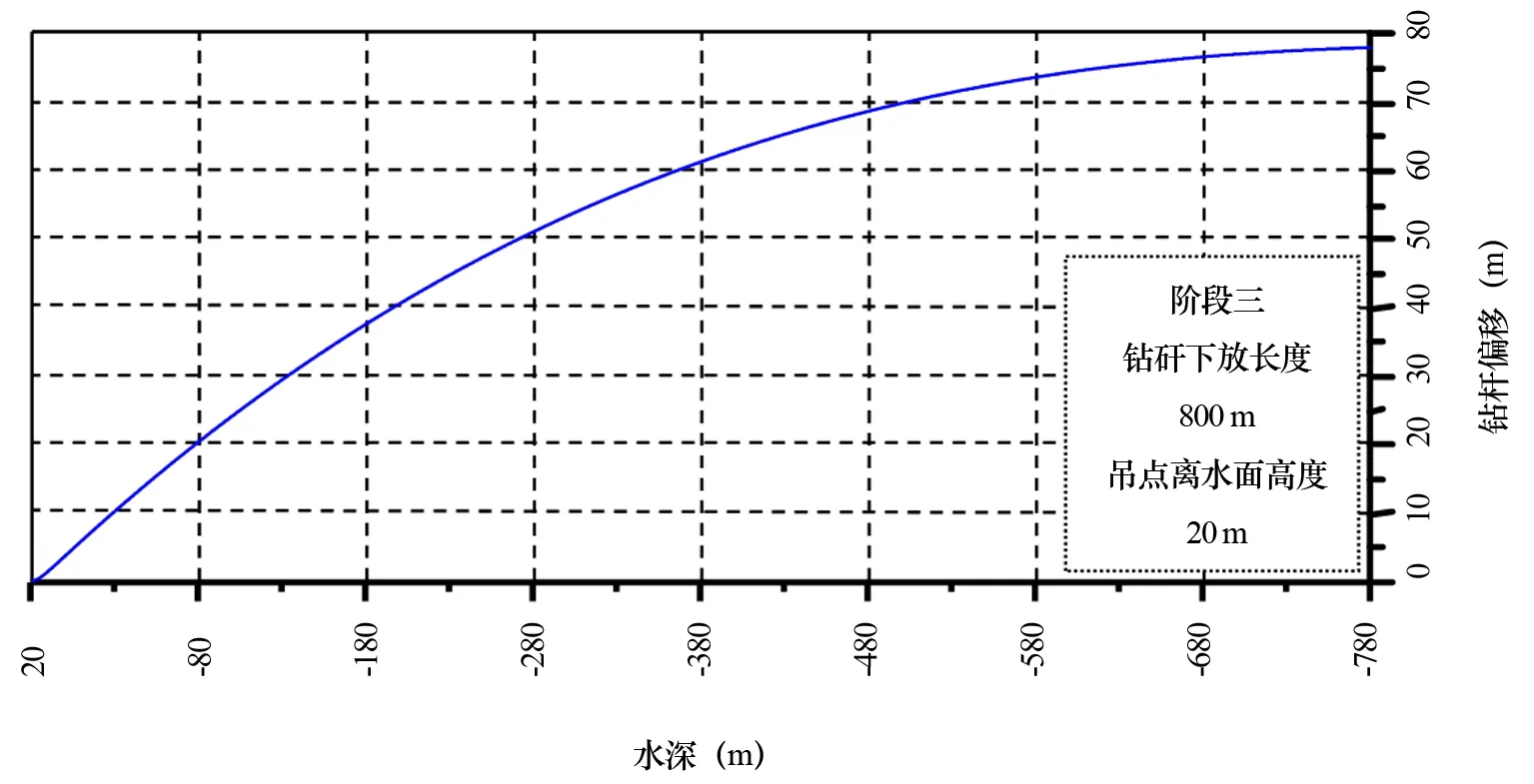
图4 钻杆在安装过程中的形变
有限元法的一个重要的性能指标是收敛性,算法的收敛性对结果的精度及计算效率有很重要的影响。在下放钻杆长度为800m的情况下把钻杆分别划分为1 000, 1 500, 2 000, 2 500, 3 000, 3 500, 4 000, 4 500, 5 000个单元,从节点计算结果中的弯矩、偏移等方面验证了此算法的收敛性。收敛性结果如图5所示。
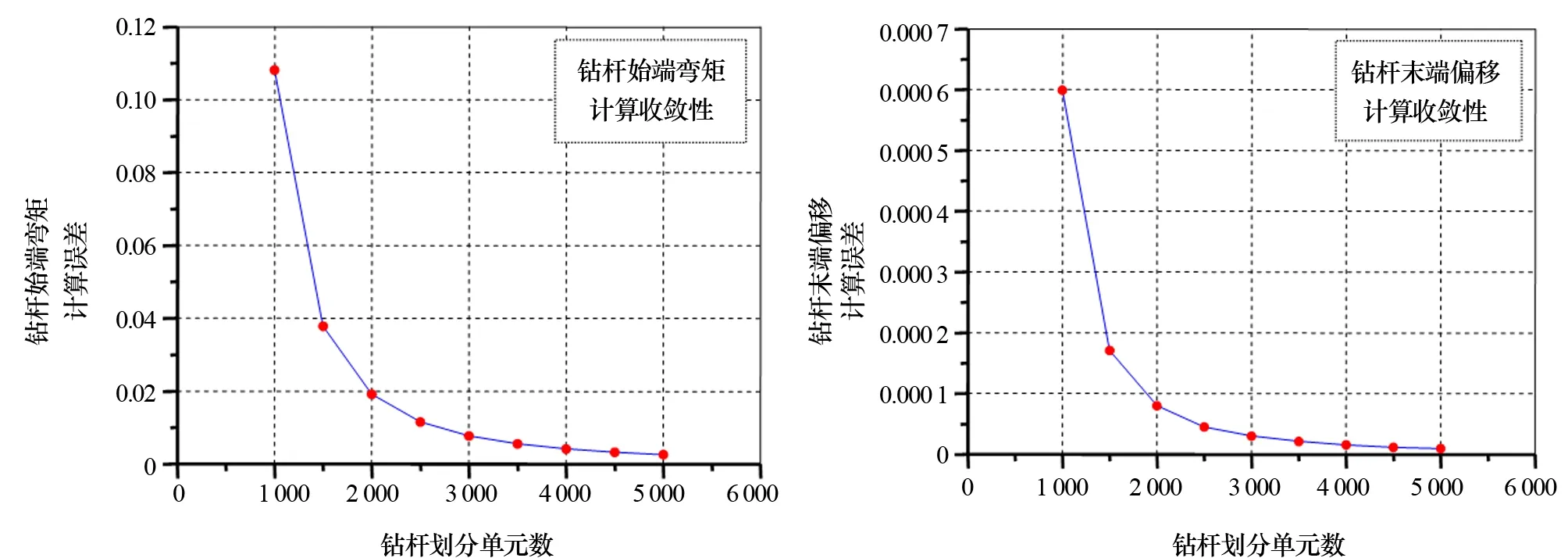
图5 有限元算法的收敛性
由此可见,此算法具有较好的收敛性,并且在钻杆长度为800m的情况下在钻杆划分单元数达到5 000时,即单元长度为0.16m时,可得到较精确的解。
5 结论
在介绍了水下生产设施的钻杆无导向安装法的基础上,通过有限元法建立了水下生产设备下放安装过程中钻杆的力学分析模型,计算了安装过程中钻杆各节点的偏移量、剪力、弯矩及所受拉力,得到以下结论:
(1)波浪力和洋流力对水下设备安装有较大的影响;
(2)随着钻杆下放长度的增加,钻杆的重力对钻杆的形变影响逐渐增加;
(3)安装过程中钻杆的最大受力点在钻杆的顶端,最大位移点在钻杆的末端;
(4)该文提供的算法具有较好的收敛性,能提供较高的计算效率。
[1] Yong BAI,Qiang BAI.Subsea Structural Engineering Handbook[M]. Gulf Professional Publishing, 2010.
[2] Yong BAI,Qiang BAI.Subsea Pipeline Handbook[M]. Gulf Professional Publishing, 2012.
[3] WILSON J F. Offshore Structure Dynamics[M]. Translate: Yang Guojin, Guo Yi, Tang Qinman, etc. Petroleum Industry Publisher. 1991.
[4] DNV.Environmental condition and environmental loads[S].2000.
[5] CCS.Ships and offshore lifting equipment specification[S].2007.
[6] Yong BAI.Marine Structural Design[J]. Elsevier Science, 2003.
[7] DNV-RP-H103.Modeling and analysis of marine operations[S].2010.
NumericalAnalysisonInstallationofSubseaProductionFacilitybyDrillPipewithGuidelessMethod
(1. Offshore Oil Engineering Co., Ltd, Tianjin 300451, China; 2. Zhe Jiang University,
Hangzhou 310058, China; 3. CNPC Baoji Oilfield Machinery Co.,Ltd, Shanxi Baoji 721002, China)
In the present paper, the installation of subsea production facility by the drill pipe with guideless method has been introduced, and the procedure for the installation has also been presented. Furthermore, the present paper focuses on carrying out the numerical analysis on the installation of subsea production facility by drill pipe with guideless method based on the installation procedure, the wind force, the wave force and the current force during the installation are calculated herein, moreover, the loading condition and boundary condition are determined for each installation steps. The finite element method has been used for mechanical analysis of the drill pipe, the distortion, shear force, bending moment and tension force of each nodes of the drill pipe are calculated accordingly.
subsea production facility; installation by drill pipe with guideless method; finite element method (FEM); mechanical analysis; numerical simulation
2014-06-27
国家科技重大专项资助项目(2011ZX05027-004)。
付剑波(1982-),男,工程师。
1001-4500(2015)01-0014-05
P75
: A
猜你喜欢
学苑创造·A版(2022年4期)2022-06-18
煤矿安全(2022年5期)2022-05-23
当代陕西(2020年24期)2020-02-01
中国金属通报(2019年9期)2019-10-21
制造技术与机床(2019年8期)2019-09-03
儿童故事画报·自然探秘(2019年4期)2019-05-14
时代英语·高一(2019年1期)2019-03-13
中学课程辅导·教学研究(2017年21期)2017-11-14
中国航海(2014年1期)2014-05-09
钻探工程(2012年7期)2012-11-07
