
仿鱼长鳍波动推进水下航行器研究进展与分析
2015-07-11 08:57中国科学院自动化研究所复杂系统管理与控制国家重点实验室王睿王硕魏清平
自动化博览 2015年7期
中国科学院自动化研究所复杂系统管理与控制国家重点实验室 王睿,王硕,魏清平
1 引言
浩瀚的海洋中蕴含有丰富的生物资源、矿产资源和能源,人类在水下环境中进行生产、科研等活动越来越频繁,水下任务的要求也不断提高,人工操作的方式从成本、安全性、效率上逐渐不能满足复杂水下任务的要求。近年来,一些智能的自主水下航行器被广泛应用于海洋开发、海洋研究、水下环境保护等领域。
目前多数水下航行器推进设计原理为:由螺旋桨产生推力,结合可操控的舵面产生机动控制力。这种机构设计对于推进器以巡航速度行驶于空旷平静海域的应用领域是经济有效的。但出于其机动控制力依赖于流体在操控舵面上的流动产生的升力,在低速下难以实现机动。此外这类推进器会在尾迹中产生大量大带宽的噪声,导致一些水下生态系统遭到严重破坏。因此,水下推进器在低速下的有效性、机动性以及噪声与尾迹的控制是制约当前水下航行器效能发挥的主要因素。
诸如弓鳍目、裸背鳗科和鳞纯科等鱼类,采用柔性长鳍波动的游动模式,生存于狭小恶劣的环境,具有良好的推进效率、机动性与稳定性,不仅能够远程迁徙,还具有灵活机动、抗扰动能力强的特点,尤其擅长于低速下的机动。

图1 几种采用波动鳍推进鱼类:(a)长刀鱼;(b)黄貂鱼; (c)乌贼; (d)鱿鱼
例如黑鬼长刀鱼,如图1(a)所示,并没有大多数鱼类拥有的背鳍,游动时身体保持直线,依靠柔性长臀鳍波动产生推力,避免身体摆动增加游动阻力的同时具有很强的稳定性和机动能力。另一种采用波动鳍推进方式进行游动的是黄貂鱼,如图1(b)所示,它通过波动或摆动硕大柔韧的胸鳍产生推进力,在复杂环境下也能保持很高的机动性并能很好地抑制紊流。图1(c)所示的乌贼与图1(d)所示的鱿鱼类似,它们身体后部都具有两条可以波动的鳍,可以利用这一对鳍在狭小的空间中灵活运动。
模拟利用鱼类游动的这些特点,研发高性能、高效、高机动性、对环境扰动小的智能仿生水下航行器引起了越来越多研究人员的研究兴趣。本文针对仿鱼长鳍波动推进水下航行器研究现状进行综述和分析,主要从推进机理、系统研制两个方面介绍国内外已经开展的主要工作,在此基础上,总结分析仿鱼长鳍波动推进水下航行器研究中的主要问题,希望能为开展后续工作提供参考。
2 鱼长鳍波动推进机理研究进展
目前,对鱼长鳍波动推进机理的研究主要有三种方法:对采用长鳍波动推进的鱼类进行观察分析、利用仿真工具进行数值仿真计算以及利用水动力学理论进行理论分析。
对采用长鳍波动推进的鱼类进行观察分析,主要是依靠高速摄像机、生物肌电信号测量仪、光电测量仪、数字粒子成像测速仪等设备来采集鱼类在游动过程中的姿态和外部流场特征,对获得的实验数据进行分析处理,然后建立相应的数学模型来揭示鱼类的游动机理。例如美国西北大学的Curet[1]通过观察“尼罗河黑魔鬼”在鱼缸中稳定驻留时的鳍面波特征,发现它们能利用两束向内反向传播的鳍面波来实现稳定驻留,并通过机器鱼原型机实验验证了该结论。国防科大的研究人员[2]利用高速数字摄像机对“尼罗河黑魔鬼”的游动过程进行了记录,并通过分析背鳍边缘线的特征建立了波动鳍的简易运动学模型。
在对鱼长鳍波动推进机理的研究中,由于观察分析的方法只能获得定性结果或者较为粗糙的定量结果,为了获得更为精确的结论,一些研究人员将广泛应用于航空器流体力学分析的计算流体力学方法引入到对鱼长鳍波动推进机理的研究中,用来计算仿真分析鱼类游动过程中鱼体周围的流场和压力场,进而计算出鱼体周围的力场,并取得了一些有意义的结果。例如,2008年,美国西北大学采用计算流体力学方法对柔性波动长鳍的水动力学展开研究,将长鳍的运动理想化为正弦行波,通过数值计算获得了推进力与波长、波频、波幅以及鳍长等参数之间的关系,并得出了长鳍波动产生推进力的首要机制是长鳍运动时生成的中心射流和相应的涡环的结论[3]。国防科技大学通过计算流体力学仿真,获得了波动鳍在不同摆动幅度、频率以及不同波数下的推进力变化情况,并结合统计分析方法得到了计算推进力的无量纲表达式[4]。中国科学技术大学利用计算流体力学的方法分析了波动鳍在不同波动模式下的推进力和推进效率[5]。
目前,有三种理论用于估算波动鳍推进的推力和效率:促动盘理论、大摆幅细长体理论以及叶片元理论[6]。促动盘理论基于简单的“黑盒子”方法,是动量原理在流体动力学中的特殊应用。此方法的基本原理是把作用于流体上的推进机构简化为理想的装置(促动盘),当流体流经它时压强会增加,通过对整个促动盘面积上压强增量的积分可获得流体对其产生的推力。此方法的主要优点在于推进机构(长鳍)被视为黑盒子,因此不需要获得其详细的运动学模型。但当推进机构运动时尾迹中脱落的涡流能量不可忽略时,这种方法存在较大缺陷。1980年,Blake应用促动盘理论分析比较了弓鳍目鱼类“尼罗河魔鬼”和海马柔性长背鳍的推进性能,其把柔性长背鳍视为一张盘,并基于此模型应用贝努力方程具体分析了“尼罗河魔鬼”和海马柔性长背鳍的推进产生的推力和推进效率。大摆幅伸长体理论广泛应用于分析依靠身体与尾鳍波动推进的鳗鲡模式和鲹科模式的推进性能,由于柔性长鳍波动方式和身体与尾鳍波动方式产生的波在形式上类似,Lighthill和Blake在1990年将“大摆幅伸长体理论”应用于分析柔性长鳍波动推进的推进性能,试图洞察推进波参数和身体与鳍的相互作用对推进性能的影响。应用叶片元分析扩展的波动板理论尝试揭示推进波参数和鳍形状对推进性能的影响,但叶片元分析方法和理论目前尚不完善。
虽然波动推进的原理比较简单,但由于波动鳍在波动过程中与水的相互作用十分复杂,目前还没有一个能十分准确描述波动模型的理论。已有的鱼类推进理论大都基于势流、线性边界条件和尾迹形状固定的假设,尚不能分析流体与鱼体之间的非线性作用,也无法解决尾迹的动态变化问题,不能精确描述真实鱼类的游动过程,计算结果仅能定性地指导仿生机器鱼的设计。
3 仿鱼长鳍波动推进水下航行器系统研制现状
在鱼长鳍波动推进机理和水动力学研究的基础上,很多研究人员开始设计制造波动鳍推进方式的水下航行器实验装置,通过实验来验证波动推进机理以及研究具有新型推进系统的水下航行器的设计与控制方法。据现有文献,最早进行仿鱼长鳍波动推进水下航行器实验研究的是英国赫瑞瓦特大学的Sfakiotakis[7]等人,他们于2001年设计了一种长鳍驱动装置,其中包含8个并行排列的鳍条,鳍条通过柔性薄膜连接形成一条长鳍,并通过气动装置驱动鳍条实现长鳍的波动,并可通过改变行波方向来改变推力方向。水动力学实验数据表明:在一定的推进参数范围内,实验装置能够产生与频率和波动幅度近似线性关系的推力,但由于气动驱动器体积和惯性较大,产生的侧向力高达推力的数十倍,该实验装置难以应用于工程实际。
经过十多年的努力,国内外研究人员逐渐研制出了多种仿鱼长鳍波动推进水下航行器系统。例如,2002年起,日本大阪大学开始研制一种鱿鱼机器人“squid robot”[8],图2(a)是其第四代机器鱼,它两侧拥有一对波动鳍,每侧长鳍由17个伺服舵机驱动,并拥有两条尾鳍,可在水中实现转向、俯仰、盘旋、上浮、下潜等运动。图2(b)是其在水下游动的照片,与其他真实鱼类同游表明其具有良好的环境友好性。

图2 日本大阪大学仿生机器鱼
南洋理工大学的Low[9]等人模仿长刀鱼研制了一种仿鱼长鳍波动推进水下航行器,目前已经研制出三代原型机。图3(a)所示的NKF-III水下航行器的机器长鳍由8根鳍条组成,每根鳍条通过“曲杆-滑块”装置连接驱动,每根鳍条按照一定的相位差作平动,能实现前进、上升、下潜等运动模式。图3(b)、(c)是南洋理工大学研制的一种仿鳐鱼长鳍波动推进水下航行器RoMan-II[10],它能在水下执行多种模式的运动。
2003年起,美国西北大学的MacIver等人仿裸背鳗科鱼“黑魔鬼”的长臀鳍波动推进方式,研制了一系列仿鱼长鳍波动推进水下航行器[11]。图4是目前最新一代原型机,它的腹部由32根鳍条以及安装在鳍条上的鳍膜组成,靠长鳍波动能产生稳定的前向推进力,还被用来研究水下航行器的姿态保持控制。
最近,瑞士联邦理工学院的Buholzer设计了一种仿鱼长鳍波动推进水下航行器Sepios,如图5所示,它具有四条长鳍,能实现水下全方位高机动性的运动[12]。

图5 Sepios仿鱼长鳍波动推进水下航行器
国内方面,仿鱼长鳍波动推进水下航行器的研制工作与国外基本上保持同步,经过十几年的发展,也取得了不少研究成果。
2009年国防科大研制了图6(a)所示的仿鱼长鳍波动推进水下航行器,并提出一种基于迭代学习的运动控制算法来保持较高的稳态推进速度[13]。图6(b)是国防科大研制的另一款仿鱼长鳍波动推进水下航行器[14],该水下航行器由一个筒形本体、两条波动长鳍、两片尾鳍以及其他电子设备组成。两条波动长鳍对称安装于本体两侧,作为航行器的推进器,通过对这对长鳍进行协调的控制,能改变该水下航行器在水中航行的速度和方向。
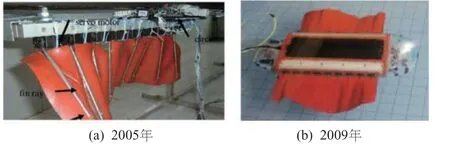
图6 国防科大仿鱼长鳍波动推进水下航行器
中国科学技术大学在2008年研制了一种仿蓝点魟原型机,图7(a)、(b)分别是波动鳍样机和整体原型机,其每一侧胸鳍均由7根鳍条和相应的鳍面组成,每根鳍条由一个独立的舵机驱动。原型机还具有重心调整机构,用于实现浮潜控制。中国科学技术大学利用该原型机分析了仿生蓝点魟鱼鳍鳍条的运动学和动力学特性,并建立了鱼鳍波动推进的运动学和动力学模型,对鱼鳍波动推进力和推进速度进行了理论推导,并实现了仿生蓝点魟模型的巡游、转弯、沉浮等基本运动模式,并使用水下红外传感器实现避障功能[15,16]。
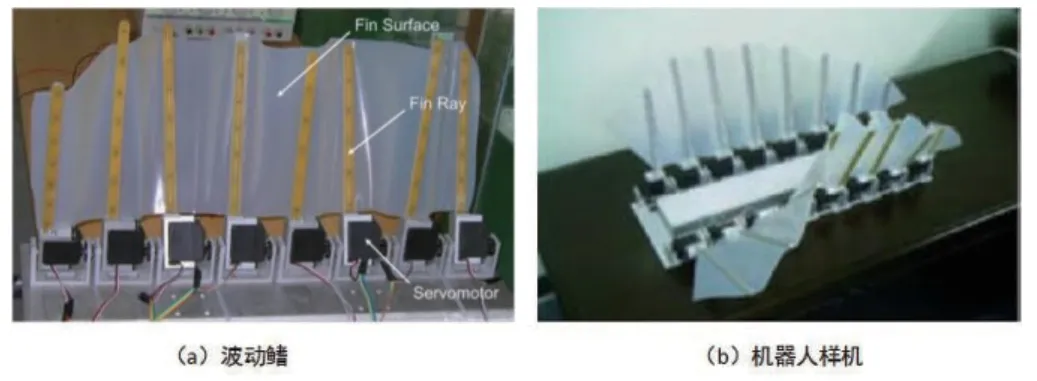
图7 中科大波动鳍推进实验装置
中国科学院自动化研究所模仿鳐鱼研制过一种靠一对波动胸鳍推进的仿生长鳍机器鱼[17,18],如图8所示,并在第二代机器鱼上实现了前进、后退等多模态运动控制,定深定向控制,路经点跟踪控制等闭环位置控制。目前正在进行第三代仿鱼长鳍波动推进水下航行器的研究工作。
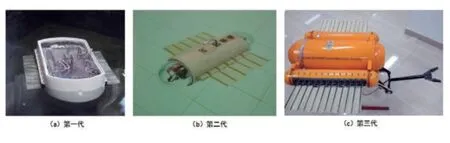
图8 中科院自动化所仿鱼长鳍波动推进水下航行器
尽管仿鱼长鳍波动推进水下航行器系统研制取得了不小的进展,现在已能完成各种运动模式控制,但大都采用开环控制方式完成波动鳍推进装置的运动控制,控制精度不高、运动能力受限,且总体上缺乏较好的上层智能控制系统,较少涉及轨迹跟踪控制、水中抗扰控制和姿态稳定控制等高层实用控制技术,目前仍难以投入实际运用。
4 仿鱼长鳍波动推进水下航行器研究存在的主要问题
目前,仿鱼长鳍波动推进水下航行器的研究已经取得良好的进展,实现了鱼长鳍波动推进机理的初步研究,一些原型机的研制以及航行器在水中的多模态运动控制及定深定向等简单闭环控制运动等功能,但仿鱼长鳍波动推进水下航行器与真实波动鳍推进鱼类游动还存在非常明显的差距。为进一步提升仿鱼长鳍波动推进水下航行器系统的性能,还应针对以下几个主要问题展开深入工作。
(1)仿鱼长鳍波动推进机理研究
推进机理研究是设计新型推进系统的基础,只有清晰地掌握了推进机理,才能设计出推进效率更高、隐蔽性更强、推进力更大的推进系统。推进系统的动力学研究对于提高波动鳍推进系统的运行品质有着至关重要的作用,但目前对于波动鳍的动力学研究还比较简单,大都将波动鳍进行简化,并只考虑特殊情况,然后利用有限元分析法求解推进力。这样获得的动力学模型对于改善实际系统的运行品质作用不大。在以后的波动鳍推进机理研究中,应合理结合使用促动盘理论、大摆幅细长体理论以及叶片元理论等理论模型,高速摄像机、DPIV等观察真实鱼类游动,CFD仿真计算这三种方法,取长补短,不断改进深化各种方法,深入研究波动鳍推进鱼类游动的推进机理,为仿鱼长鳍波动推进水下航行器系统的优化设计与控制提供依据。
(2)仿鱼长鳍波动推进水下航行器系统设计
仿鱼长鳍波动推进水下航行器系统设计包括机械结构设计和电气系统设计。机械结构方面,由于材料、驱动、加工等方面的限制,以及对鱼类某些特殊结构及其相应的功能认识还有待完善,完全模仿鱼类的外形、结构还比较困难,仿鱼长鳍波动推进水下航行器系统的结构多是对真实鱼类结构在一定程度上的近似模拟,航行器的波动鳍多采用数根鳍条通过薄膜连接而成,其优点是结构简单,可以对单根鳍条进行单独的控制,但由于鳍条数目有限,仿鱼长鳍波动推进水下航行器还不能像真实鱼类一样自然游动,推进性能受外形和结构的影响较大,因此,在推进机理研究基础上,结合虚拟样机和水动力学仿真,深入研究仿鱼长鳍波动推进水下航行器在外形、平衡、推进、浮潜等模块结构的综合设计与优化方法,从而获得良好的减阻、推进效果。此外,还可研制相应的原型机并通过水动力学实验的方法对机构设计进行检验、测试和优化。电气系统方面,传统的驱动系统大都采用舵机驱动,它具有运行稳定、控制简单的优点,但也存在体积大、噪声大、精度较低的缺点。所以目前有很多研究人员已经开始使用EAP、IPMC、压电陶瓷等新型驱动材料,它们具有精度高、噪声小的优点,是未来驱动系统的研究热点。
(3)仿鱼长鳍波动推进水下航行器控制研究
仿鱼长鳍波动推进水下航行器推进系统高效、高机动运动的实现,不仅与其外形和机构设计有关,其游动过程中的运动控制方法也至关重要。现有的鱼类游动机理研究表明:真实鱼类通过身体和长鳍对水中涡流的有效控制是其高效、高机动游动和抑制外部环境扰动的直接原因。然而,目前仿鱼长鳍波动推进水下航行器还不能检测环境流场的实时变化,也不具有精确实用的控制模型,并且缺乏实时推力估算的方法,与真实鱼类的运动能力仍存在巨大的差距。当然,冰冻三尺,非一日之寒,应先研究仿鱼长鳍波动推进水下航行器如何通过惯导系统、鱼体压力、鳍面压力等传感器感知周围环境,估计流场状态、环境扰动的方法,基于状态估计与反馈设计智能控制、扰动抑制方法,进而实现波动鳍推进水下航行器精确的位置、姿态控制,并在此基础上研究波动鳍推进水下航行器路径规划、姿态保持控制等实用控制方法,最终实现接近真实鱼类的运动能力,并可在其上加装机械臂等水下作业工具,让其可以为人类带来实用价值。
5 结语
海洋中生活着种类繁多,形态各异的鱼类,经过亿万年的自然选择,进化出了非凡的运动能力,尤其是采用波动鳍方式推进的鱼类,在低速、复杂环境下具有优越的机动性和稳定性。鱼类的这些特点引起了国内外研究人员的广泛关注,并据此开展了一些研究工作,以期揭示鱼类形成这些运动特点的内在原因,并希望通过模仿这类鱼类的运动方式,研制出高效、高机动的仿鱼长鳍波动推进水下航行器系统。
[1] Curet O M, Patankar N A, Lauder G V, et al. Aquatic manoeuvering with counter - propagating waves: a novel locomotive strategy[J]. Journal of The Royal Society Interface, 2011, 8 (60) : 1041 - 1050.
[2] Hu T J, Shen L C, Lin L X, et al. Biological inspirations, kinematics modeling, mechanism design and experiments on an undulating robotic fin inspired by Gymnarchus niloticus[J]. Mechanism and Machine Theory, 2009, 44 (3) : 633 - 645.
[3] Shirgaonkar A A, Curet O M, Patankar N A, et al. The hydrodynamics of ribbon - fin propulsion during impulsive motion[J]. Journal of experimental Biology, 2008, 211 (21): 3490 - 3503.
[4] Han Z, Daibing Z, Tianjiang H, et al. Statistical hydrodynamics modeling of two - dimensional undulating fins for robotic fish[C]. IEEE International Conference on Robotics and Biomimetics. 2009: 1663 - 1668.
[5] Yong Hua Z, Lai Bing J, Shi Wu Z, et al. Computational research on modular undulating fin for biorobotic underwater propulsor[J]. Journal of Bionic Engineering, 2007, 4(1) : 25 - 32.
[6] Sfakiotakis M, Lane D M, Davies J B C. Review of fish swimming modes for aquatic locomotion[J]. Journal of Oceanic Engineering, 1999, 24(2) : 237 - 252.
[7] Sfakiotakis M, Laue D M, Davies B C. An experimental undulating-fin device using the parallel bellows actuator[C]. IEEE International Conference on Robotics and Automation. 2001: 2356 - 2362.
[8] Rahman M M, Toda Y, Miki H. Computational study on a squid - like underwater robot with two undulating side fins[J]. Journal of Bionic Engineering, 2011, 8(1): 25 - 32.
[9] Low K H, Junzhi Y. Development of modular and reconfigurable biomimetic robotic fish with undulating fin[C]. IEEE International Conference on Robotics and Biomimetics. 2007: 274 - 279.
[10] Zhou C L, Low K H. Better endurance and load capacity: an improved design of manta ray robot (RoMan-II)[J]. Journal of Bionic Engineering, 2010, 7: S137 - S144.
[11] Curet O M, Patankar N A, Lauder G V, et al. Mechanical properties of a bio-inspired robotic knifefish with an undulatory propulsor[J]. Bioinspiration & biomimetics, 2011, 6(2) : 1 - 9.
[12] Moller M P, Schappi A, Buholzer P, et al. Sepios: Riding the Wave of Progress [EB/OL] . http://sepios.org/, 2014.
[13] Chen J, Hu T J, Lin L X, et al. Learning Control for Biomimetic Undulating Fins: An Experimental Study[J]. Journal of Bionic Engineering, 2010, 7: S191 - S198.
[14] Zhou H, Hu T, Xie H, et al. Computational and experimental study on dynamic behavior of underwater robots propelled by bionic undulating fins[J]. Science China Technological Sciences, 2010, 53(11) : 2966 - 2971.
[15] 章永华. 柔性仿生波动鳍推进理论与实验研究[D]. 中国科学技术大学, 2008.
[16] Wu W G, Yan Q, Zhang S W, et al. Design and experimental research on an undulatory robotic fin[C]. IEEE International Conference on Robotics and Biomimetics. 2009: 2440 - 2444.
[17] Wei Q P, Wang S, Zhou C, et al. Course and Depth Control for a Biomimetic Underwater Vehicle - RobCutt - I[C]. International Ocean and Polar Engineering Conference. 2014.
[18] Shang L J, Wang S, Tan M, et al. Swimming locomotion modeling for biomimetic underwater vehicle with two undulating long - fins[J]. Robotica, 2012, 30: 913 - 923.
猜你喜欢
建材发展导向(2021年14期)2021-08-23
哈尔滨轴承(2021年1期)2021-07-21
小学科学(2020年11期)2020-03-04
中国煤层气(2019年2期)2019-08-27
东方法学(2017年4期)2017-07-13
中北大学学报(自然科学版)(2016年6期)2016-12-23
天津诗人(2014年4期)2014-11-14
游泳(2014年3期)2014-03-27
火炸药学报(2014年1期)2014-03-20
火炸药学报(2014年1期)2014-03-20
