
基于直角坐标机器人的注塑机的取件及嵌件治具的设计
2015-07-07 07:06郭金艳沈精虎张岐家
制造业自动化 2015年7期
郭金艳,沈精虎,张岐家
(青岛大学 机电工程学院,青岛 266071)
0 引言
在现代精工机械化生产中,机器人在自动化生产中的比重日趋增多。直角坐标机器人作为一种容易操作并趋于成熟的机型,广泛应用于注塑、钣金、包装、检测、码垛以及物流自动化等各种生活生产中[1]。
在注塑机的取件及嵌件的方面,目前的状况是由许多成型机成型后由人工上料,完成取件、嵌件的工作,每台成型机需要多名工人辅助,上料站立式工作劳动强度大、工作繁琐,容易造成疲劳、 生产效率和良品率低的状况。机器人的应用将会解决这类问题,为工厂的自动化生产提供了保证。
机械手在注塑机上的整体布局如图1所示,总体设计包括机械手、治具、注塑机、工装成品存放架等部分。机械手根据注塑机的开模、合模紧密配合生产节拍进行动作,提高工作效率,提高产量。

图1 整体布局
本文研究基于直角坐标机器人的对手机壳成品取件及螺母嵌件的治具装置的设计,利用机器实现自成型机中取件,并完成螺母嵌件及其他嵌件的安放,并对其中的连接件分析计算,利用SolidWorks Simulation软件对其进行有限元分析,为其优化及设计提供相应的理论支持。保证在生产过程中的可靠性,延长机器的寿命,提高工作效率和良品率,节省人工成本,提高自动化率,减少人员管理风险。
1 治具结构设计
治具完成取成品件和嵌螺母的动作,根据产品需要对治具进行设计,所取产品为手机外壳,所嵌件为螺母。
治具结构如图2所示。治具由双轴气缸、顶针气缸、吸盘组件、气抓连接板、特制吸嘴和定位导柱组成。
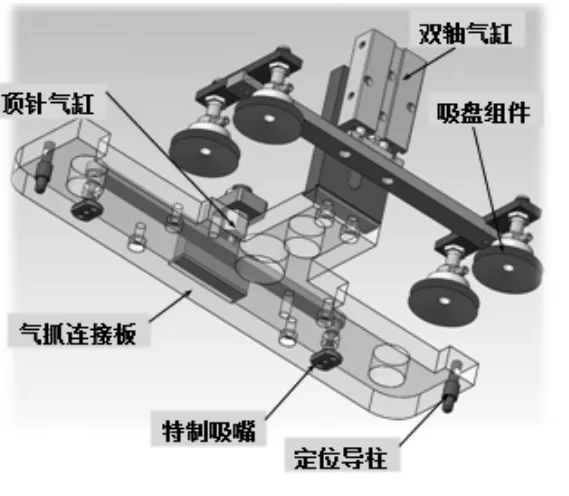
图2 治具结构
1.1 抓取产品部分设计
抓取产品部分:吸盘组件,根据表面光滑,形状规整,且质量较小的产品特性,选用吸盘方式吸取产品,能保证在注塑机内取出产品后不变形。
真空吸盘的直径计算公式为:

d:吸盘直径(mm)
M:负载重量(kg)
S:安全系数
P:真空度(-kPa)
其中,安全系数与吸取方向有关,水平吸取时取值为2,垂直吸取时取值为4,吸取方向如图3所示。

图3 吸盘吸取方向
由计算可得吸盘直径为7.8mm,取标准直径10mm。
为提高效率,每个周期完成两套产品一起抓一起放。抓取产品示意图如图4所示。

图4 抓取产品示意图
1.2 吸取螺母部分设计
吸取螺母部分:真空吸嘴吸取螺母,选用精度高,不占空间,灵活度高的顶针气缸,适用于螺母等面积、质量不大的产品。其中吸嘴上方的弹簧起柔性保护作用,气抓吸取螺母示意图如图5所示。

图5 气抓吸取螺母示意图
2 治具动作
根据任务要求,选用牛头式直角坐标机器人,完成三维坐标空间内的直线运动,并在末端设计专门的治具,实现对相应的产品进行吸取、释放的动作。保证在吸气、断气时,不会出现工件松开或脱落的状况,并且吸取、释放的位置确保正确、到位。
机械手治具依附于直角坐标机械手在注塑机上动作,治具安装在翻抓上,其总体工作流程如图6所示。因负载相对较小,因此可以采用控制简单灵活,安全可靠,设计简单,容易操作的气动方式进行抱取、吸取,实现取件、嵌件,完成规定要求动作。

图6 工作流程
3 对受力件有限元分析
治具在吸取产品时,其中铝条受力件会承受气缸推力以及压板和产品的重力,以保证结构的强度刚度满足要求[4]。利用SolidWorks Simulation软件分析主要分为以下三个步骤[2]:
1)预处理:建立几何模型,定义分析类型,添加材料属性,施加载荷及约束,划分网格,形成有限元模型。
2)求解:用指定的求解类型及求解模式计算得出所需结果。
3)后处理:查看并分析结果。
对主要受力连接件受力分析,铝条模型如图7所示,材料为6061铝合金,属性如表1所示。首先对铝条进行模态分析,前处理铝条网格划分如图8所示。

图7 铝条模型

表1 6061铝合金材料属性

图8 前处理铝条
在分析时,视铝条中间两孔为固定约束,在两端分割面处受到的外力作用,由称重可得为0.25kg。通过求解、处理得到一阶到五阶固有频率如图9所示。

图9 固有频率
由于气缸推动铝条向下吸取产品时的频率为0~600HZ,与其固有频率相差较大,因此,不会存在产生共振的可能。其一阶、二阶振型如图10、图11所示。

图10 一阶振型

图11 二阶振型
对铝条进行静力分析,可得应力应变如图12、图13所示。

图12 铝条应力图

图13 铝条变形图
由应力、变形图可知,最大应力为3.538MPa,最大变形量为0.0012mm。对结果进行分析,对于6061系铝合金,屈服强度为55Mpa,因此强度符合要求;其0.0012的变形量满足工程精度要求,可准确吸取产品[3]。
4 结束语
本文基于直角坐标机器人,选用牛头式结构,设计实现注塑机的取件及嵌件的治具工作,并对其结构的合理化进行分析计算。提高了生产效率,满足了客户的自动化需求,紧密配合生产节拍,大大减少人力,实现人机结合,为工厂的自动化生产提供了保证。
[1]张蓉,王春洁,王国栋,等.基于FMEA和FTA的三自由度直角坐标机器人系统可靠性仿真分析[J].机械科学与技术,2006.25(6):651-654.
[2]陈超祥,叶修梓.Solidworks Simulation基础教程[M].机械工业出版社,2010.
[3]刘鸿文.材料力学[M].高等教育出版社,2003.
[4]郭永刚,负超,黄荣瑛.水火成型机器人横梁有限元计算与分析[J].现代制造工程,2003(12):87-88.
猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
哈哈画报(2021年12期)2021-02-28
装备制造技术(2020年3期)2020-12-25
模具制造(2019年10期)2020-01-06
小雪花·初中高分作文(2019年8期)2019-10-07
制造技术与机床(2019年6期)2019-06-25
中国储运(2019年1期)2019-01-09
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
