尾流自导鱼雷双雷齐射的解算
2015-07-01 07:58毛俊超李长文高建亭
兵器装备工程学报 2015年10期
毛俊超,李长文,高建亭
(海军潜艇学院,山东青岛 266042)
尾流是舰艇在航行时由于舰体运动和螺旋桨转动引起的泡沫区域,与海水介质相比,尾流的声特性、热特性和磁特性均出现了异常,这种特性异常提供了发现和跟踪舰艇的可能性和途径[1,2]。在组织鱼雷射击目标时,尾流自导比声自导鱼雷有无可比拟的优点: 抗干扰能力强,更适合攻击中高速航行的水面舰艇,自导装置简单可靠[3]。但要求鱼雷以一定的角度进入尾流一定的距离范围内[4],而且由于受解算目标运动要素误差和鱼雷自身航行误差的干扰,致使潜艇在一次射击中使用单条鱼雷达成预定攻击效果十分困难,多雷齐射便成为潜艇对目标实施鱼雷攻击时常用的一种重要射击方式[5]。当目标舷角过小或者过大时,会导致命中角(即尾流进入角)过小,在文献[6]中,通过仿真试验讨论了在不同的态势条件下命中角对于射击效果的影响,并针对初始射距和目标速度这2 个要素进行相应的仿真分析。本研究对双雷齐射鱼雷的接近阶段的运动轨迹进行研究,分析鱼雷的出管顺序,计算出各枚鱼雷的射击参数,帮助提高导引段的精确制导。
1 射击三角形解算
射击三角形是直进射击要解算的元素,但也同样用于尾流自导鱼雷射击中接近段的射击诸元。如图△WMC 为射击三角形,满足鱼雷命中目标的期望条件,即目标从M 点航行至C 点所用时间与鱼雷从W 点航行至C 点所需时间相同,设该时间为t。已知:射距D,目标速度vm,目标舷角Xm,鱼雷速度v,设下面通过解算得到提前角φ(自然就得到命中角θ)。如图1 所示。
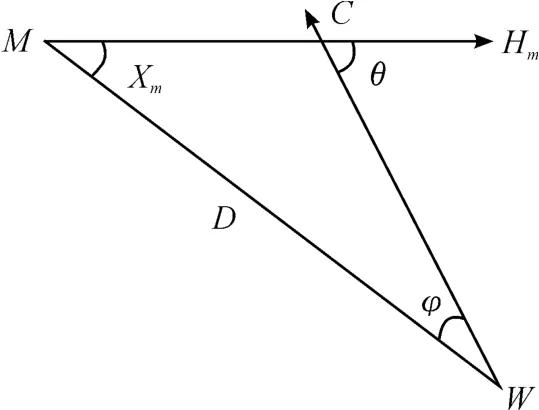
图1 射击三角形
由正弦定理得
即

由式(1)得sinφ =msinXm,从而φ =arcsin(msinXm),或者φ=π-arcsin(msinXm),而φ=π-arcsin(msinXm)不满足式(2),即不满足事实条件t >0,这是因为: 若将φ = π -arcsin(msinXm)代入式(2)得

设y= x + π - arcsin(msinx),(0≤x≤π),由y' =1 -知,y 在[0,π]上是增函数,故y≥y(0)=π,所以sin[(π -arcsin(msinXm)]≤0,而D≥0,v≥0,sinXm≥0,从而t≤0,不符合事实。所以提前角有唯一解φ=arcsin(msinXm)。
2 尾流自导鱼雷齐射原理
采用双雷齐射,总是采用平行航向齐射,即齐射的2 条鱼雷除了完成1 次转角外,还要进行2 次转角,并且通过2次转角使2 条鱼雷进入平行航向航行,其原理如图2 所示。
图2 中的虚线称为中线,是假想存在的线,假想是某个鱼雷的运动轨迹,多雷齐射时,两雷对称在该中线两侧发射。因此首先要计算中线鱼雷的转角(其原理与单雷射击相同),搜索航行段航程及命中角,在此基础上,根据确定的齐射鱼雷散角计算齐射各雷展开角、转角,各雷展开段航程及2 次转角。

图2 双雷齐射原理
3 齐射扇面中线转角等射击诸元计算
在图3 所示的射击三角形中,令齐射扇面中线(鱼雷)发射出管(A 为出管距离,a 为出管直航距离)自控转向后直航至目标有效尾流中点C 的时间与目标从M'点航行至M 的时间相等。
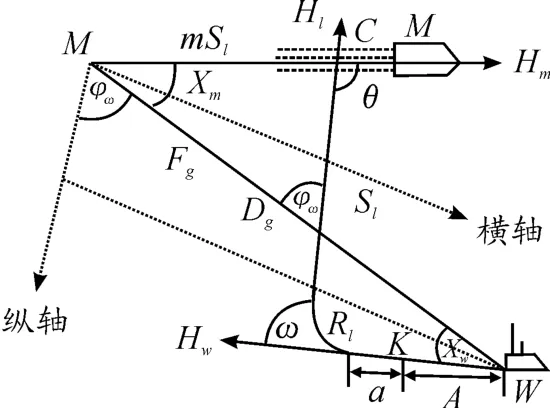
图3 鱼雷转角射击示意图
系统按式(3)计算出转角齐射扇面中线射击诸元(均为瞬时计算值)
为方便系统应用该模型进行计算,需首先进行消元变换而成为只含未知量φω的方程式。程序设计时采用直进射击提前角arcsin(msinXm)赋予φω初值。采用迭代算法即可计算出满足一定精度要求的φω值。
由于各种误差,系统按照式(4)对敌我相对位置坐标及其态势自动进行修正后,再按命中方程式计算而得到满足期望命中条件的齐射扇面中线射击诸元。

多雷齐射必须解决的2 个方面的问题:鱼雷出管顺序和各枚鱼雷射击参数的计算与装订问题。
齐射中,转角较大的鱼雷先出管。
当中线鱼雷转角ω≥0 时,鱼雷出管的顺序是先左舷发射管的鱼雷出管,后右舷发射管的鱼雷出管。即左舷鱼雷为第1 雷,右舷鱼雷为第2 条鱼雷。
反之,当中线鱼雷转角ω <0 时,鱼雷出管的顺序是先右舷发射管的鱼雷出管,后左舷发射管的鱼雷出管。即右舷鱼雷为第1 条雷,左舷鱼雷为第2 条鱼雷。
4 尾流自导双雷齐射各雷展开角及其转角计算
中线鱼雷转角:ω=Xw+φ(由转角计算公式解算)。
两雷之间散角:事先确定的参数,比如α=60°。
各雷诸元参数:
第1 条鱼雷的第1 次转角

第2 条鱼雷的第1 次转角

第1 条鱼雷的第2 次转角

第2 条鱼雷的第2 次转角

两次转角前鱼雷的直航距离

鱼雷间隔

5 结论
主要从射击三角形、齐射扇面中线转角射击诸元计算和双雷齐射各雷展开角及其转角计算三方面,对尾流自导鱼雷接近段弹道进行解算分析,为导引段提供更为精确解算数据,从而提高命中概率。
[1]欧阳光中.数学分析[M].北京:高等教育出版社,2007:195-223.
[2]石秀华,王晓娟.水中兵器概论(鱼雷分册)[M].西安:西北工业大学出版社,2005:163-165.
[3]张静远.鱼雷作战使用与作战能力分析[M].北京:国防工业出版社,2005:167-169.
[4]武志东,李祥柯.尾流自导鱼雷一次转角射击时的有效射击阵位[J].舰船电子工程,2007(3):199-202.
[5]李本昌,梁涛.尾流自导鱼雷的齐射及其建模[J].火力与指挥控制,2008(6):128-130.
[6]汪二照,孔军.尾流自导鱼雷双雷二次转角齐射[J].指挥控制与仿真,2009(3):53-57.
[7]武志东,朱伟良,张靖康. 尾流自导鱼雷双雷齐射射击诸元优化模型[J].兵工自动化,2013(7):1-5.
[8]雷震撼,袁富宇.自导鱼雷转角射击诸元简化计算[J].四川兵工学报,2014(1):41-44.
猜你喜欢
智能计算机与应用(2021年5期)2021-10-05
舰船电子工程(2021年6期)2021-06-28
科学与财富(2021年33期)2021-05-10
学生天地·小学低年级版(2018年9期)2018-12-03
——书写要点(三)
学生天地(2018年33期)2018-11-08
学生天地·小学低年级版(2018年11期)2018-01-05
军事运筹与系统工程(2017年1期)2017-07-31
雷达学报(2017年6期)2017-03-26
水下无人系统学报(2016年3期)2016-10-13
舰船科学技术(2015年8期)2015-02-27