
将光寻址空间光调制器应用于光学相关器
2015-07-01 07:49赵融生陈向宁薛俊诗郭连朋
兵器装备工程学报 2015年12期
赵融生,陈向宁,薛俊诗,郭连朋
(装备学院,北京 101400)
光学相关器是基于匹配空间滤波原理[1]的光学相关技术,在实时目标识别[2-3]、自动导航[4]、指纹识别[5]等模式识别领域得到广泛的研究和应用。2000年左右,加州理工大学的小车导航[4]和日本Holoplex 公司的指纹识别系统[5]都已见诸报道。斯坦福大学、IBM、清华大学等多家研究机构对光学相关器进行了深入研究。通常,光学相关器由CCD 获取目标图像,将其通过计算机加载到电寻址空间光调制器(Spatial Light Modulator,SLM)[6],激光通过电寻址空间光调制器,读取目标图像,完成后续的相关识别。这种获取目标图像的方式,参与工作的器件过多,各器件性能的不同,会严重影响激光获取的目标图像的质量和速度。
本研究提出采用光寻址空间光调制器(Optically Addressed Liquid Crystal Light Valve,OALCLV)[7-8]直接获取目标图像。它将目标图像加载到液晶层上,激光经过光寻址空间光调制器,读取目标图像。该器件省略了CCD 和计算机等器件,提高了获取目标图像的速度和目标图像的质量。使用光寻址空间光调制器,设计并构建了一台全息存储[9]与相关识别系统[10]。该系统可以将模板图像的全息图存储于晶体上,实现目标图像与模板图像的实时相关识别。
1 光学相关器的工作原理及设计
1.1 光学相关识别理论
光学相关器是基于匹配空间滤波原理[1]的光学相关技术。它是通过输入函数与参考函数傅里叶变换的乘积实现的。参考图形以参考函数傅里叶变换的共轭形式存储起来,作为空间滤波器。由于是复函数,因此可以用全息图来实现。该滤波器的作用是要与输入函数进行互相关运算,判断是否与参考函数匹配。
首先,将模板图像O(x,y)作为物光输入,经过傅里叶变换,与对应的参考光R(x,y)发生干涉,形成匹配滤波器β'O*R,并记录在全息材料里。如式(1)、式(2)、式(3)所示[11]。
物光与参考光发生干涉

其强度分布
记录在全息材料上,得到的全息图的分振幅透过率

然后,将目标图像S(x,y)经过傅里叶透镜变换的频谱S(fx,fy),与匹配滤波器β'O*R 进行相关运算。若目标图像与模板图像相同,可有CCD 得到一个明亮的相关峰。若不相同,则不能得到相关峰
1.2 器件的工作原理
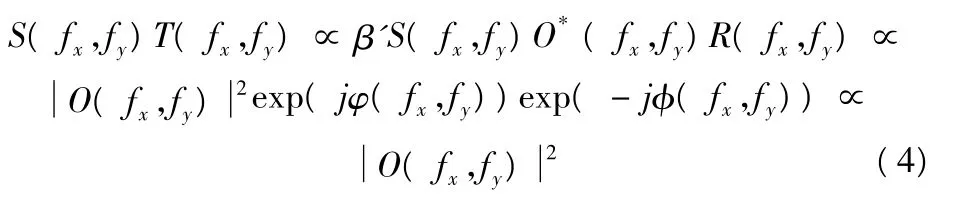
光寻址空间光调制器作为本系统的核心器件,它的作用是获取目标图像,其结构如图1 所示。该器件由玻璃衬底、透明电极、液晶分子取向膜层、垫片、光阻挡层、液晶层、光电导层、和介质反射层组成。工作原理:通电工作时,加在两透明电极上的外电压,作用在液晶层、反射膜光阻挡层和光电导层上。光电导层上光照的情况决定液晶电光效应。将目标图像成像在器件的光电导层上,作为写入光。光电导层上光照大,电阻小,外电压主要分布到液晶层上,使液晶层产生电光效应,由此在相应区域对激光产生调制作用,使激光的偏振方向相应的发生改变,输出的光束也有较大的输出。反之,光电导层上光照小,则不会对激光产生调制作用,输出的光束有较小输出。对于写入图像上其他照度区域,输出光束的相应像素的输出光强将介于最大值和最小值之间。所以激光经过器件的透明电板、液晶层和介质反射膜反射后返回,再次透过液晶层,经检偏器后只有某特定偏振方向的光出射,显示出目标图像信息。不通电工作时,器件不会改变入射光的偏振态,即反射光与入射光的偏振态相同。
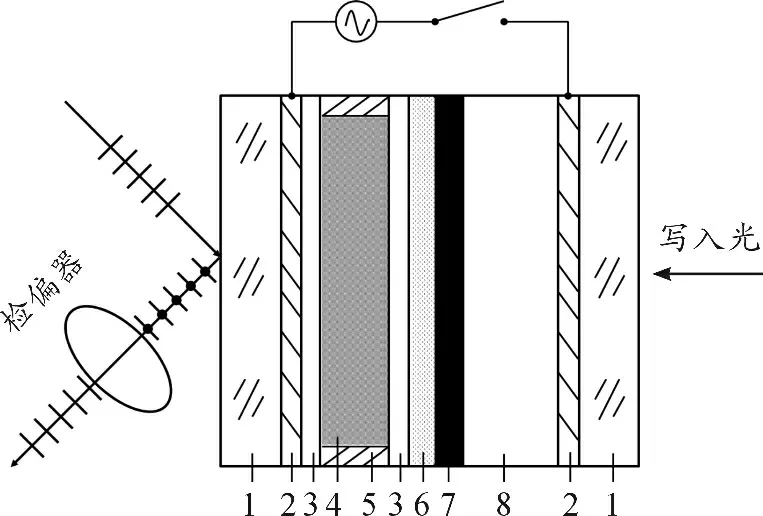
图1 光寻址空间光调制器的结构
电寻址空间光调制器是本系统的重要器件,它的作用是获取模板图像。其工作原理如图2 所示。计算机将CCD 探测到的模板图像转化为视频图像信号加载到器件的电极上,使电极对应的液晶分子产生电光效应。从而改变透射光的偏振态,使经过检偏器的光束,在接受屏上可以显示出模板图像。不工作时,不会改变透射光的偏振态。本系统使用透射式空间光调制器,分辨率1 204 ×768、像素大小26 μm。
图2 电寻址空间光调制器的工作原理
透镜的焦距均为100 mm。CCD1 用于观察通过参考光照射存储于晶体中模板图像的全息图的再现模板图像;CCD2 用于探测目标图像频谱与模板图像的全息图进行相关识别的相关峰。
1.3 光学相关器的设计
如图3 所示,该系统主要由激光器、电寻址空间光调制器(Spatial Light Modulator,SLM)、光寻址空间光调制器(Optically Addressed Liquid Crystal Light Valve,OALCLV)、存储材料[12-13](Fe:LiNbO3 晶体)、探测器、傅里叶透镜组成。
该系统分为制作滤波器和进行相关识别两部分。
1)将模板图像的全息图记录在晶体上,制作成匹配滤波器。激光器发出的激光,经准直扩束装置后,扩束成平行光束。该光束经过偏振分光棱镜,反射一束振动方向垂直于桌面的参考光光束②和透射一束振动方向平行于桌面的物光光束③。物光光束③透射过SLM,获取模板图像。经过未加电的OALCLV 反射和透射过偏振方向垂直于桌面的检偏器,与参考光光束②在晶体处发生干涉,将模板图像的全息图记录在晶体上,制作成匹配滤波器。
2)进行光学相关识别。光束③透射过未工作的SLM,获取OALCLV 上加载的目标图像,将其经过傅里叶透镜变换的频谱与存储在晶体中的全息图进行相关识别。最后由CCD2 获得相关识别的结果。
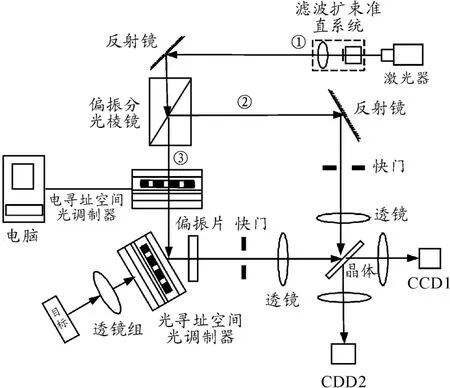
图3 系统结构
2 实验结果分析
2.1 相关识别结果分析
选择字母‘A’、‘ABCDA’、‘BCD’作为模板图像,将其全息图记录在晶体中,它们经过参考光再现的图像如图4、5、6所示。选择字母’A’作为目标图像,分别与存储在晶体中的全息图进行相关识别,相关识别结果及其相应的数值处理如图7、图8、图9 所示。

图4 模板图像A

图5 模板图像ABCDA

图6 模板图像BCD

图7 ‘A’与‘A’进行相关识别及相应的数值处理
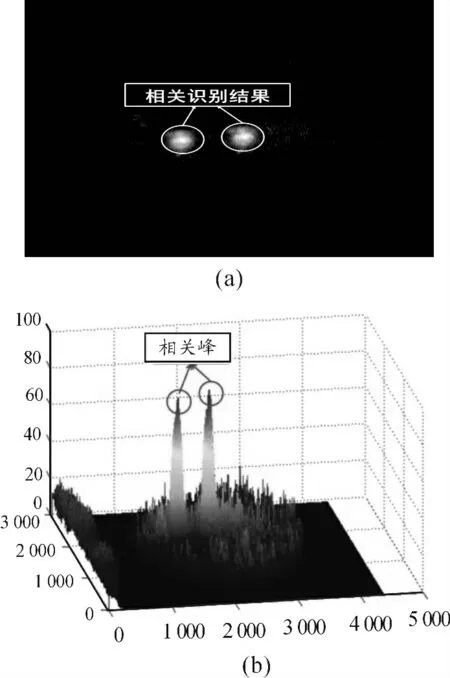
图8 ‘A’与‘ABCDA’进行相关识别及相应的数值处理

图9 ‘A’与‘BCD’进行相关识别及相应的数值处理
由图可知,由光寻址空间光调制器获取的目标图像可以与存储于晶体中的模板图像进行相关识别,得到相关峰值,如图7(a)、7(b)所示。由图可知相关峰能量相对集中,但是存在很多噪声,这是由于晶体散射造成的。当使用’A’与’ABCDA’进行相关识别时,由于模板图像中两个’A’的距离较近,因此得到两个明显的、峰值近似相等的相关峰,如图8(a)、8(b)所示。由图9 可知,由于模板图像’BCD’没有目标图像’A’,所以没有相关峰产生。
2.2 两种调制器性能分析
由表1 可知,光寻址空间光调制器获取目标图像的速度[8]和图像分辨率,均高于电寻址空间光调制器。而且电寻址空间光调制器需要配合CCD 进行使用,其获取图像的速度又会被延长,图像的分辨率也会受到约束。光寻址空间光调制器的靶面可以做到6inch,具有更大的视场。

表1 获取目标图像的比较
3 结论
本研究构建的光学相关器是一套实验验证光路系统,它将光寻址空间光调制器应用在光学相关识别系统中,实现了模板图像存储、获取目标图像及与模板图像相关识别,得到了相关识别结果并进行了相应的数值处理与分析,通过实验,验证了本系统可以提高获取目标图像的速度,及实现光学相关识别的可行性。
光学相关识别具有处理识别速度快,信息容量大,抗干扰能力强,结构紧凑等优点,用于成像制导,可以大大提高导弹攻击的机动性,抗干扰能力和命中率,实现导弹末制导的智能化。该光学相关器有望应用于导弹末制导[14-15]、遥感影像匹配[16]中。
[1]Vander Lught A B. SIGNAL DETECTION BY COMPLEX SPATIAL FILTERING[J]. AMERICAN JOURNAL OF PHYSICS,1963.
[2]Miller P C,Royce M,Virgo P,et al.Evaluation of an optical correlator automatic target recognition system for acquisition and tracking in densely cluttered natural scenes[J].Optical Engineering,1999,38(11):1814-1825.
[3]Hu Maohai.Algorithm of object recognition based on similarity measurement of correlation output[J].Chinese Laser,2012,39(4):0409002.
[4]Pu A. Real time vehicle navigation using a holographic memory[J].Opt.Eng.,1997,36(10):2737-2746.
[5]Psaltis D,Mok F. Holographic memories[J]. Scientific American,1995,273:70.
[6]朱成禹.电寻址空间光调制技术的研究[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所),2002.
[7]刘永军,宣丽,胡立发,等.高精度纯相位液晶空间光调制器的研究[J].光学学报,2005,25(12):1682-1686.
[8]杨忠,陈正国,张秉华.铁电液晶光寻址空间光调制器特性测试与分析[J].光电工程,1994,21(1):47-52.
[9]李建华,曹良才,谭小地,等.基于LiNbO_3 晶体的透射式共光轴体全息存储技术[J].光学学报,2012(4):76-82.
[10]曹良才,何庆声,尉昊赟,等.10Gb/cm ~3 小型化体全息数据存储及相关识别系统[J]. 科学通报,2004(23):2495-2500.
[11]Goodman J W.傅里叶光学导论[Z].2006.
[12]陆猗,刘思敏.Fe:LiNbO3 光折变晶体实时光学相关存贮研究[J].物理学报,1994 (11):1770-1775.
[13]石宏新.双掺Hf:Fe:LiNbO_3 晶体光折变性能及其光学相关识别应用研究[D].哈尔滨哈尔滨工业大学,2010.
[14]张常国. 光学相关识别制导技术[J]. 飞航导弹,1990(12):43-48.
[15]魏建中,陈先兵. 应用光学相关识别的成像制导系统[J].红外与激光工程,1995(1):60-64.
[16]赵瑱,何庆声,曹良才,等.一种用于遥感图像景象匹配的快速光电混合系统[J]. 红外与激光工程,2012,41(6):1659-1663.
猜你喜欢
科学技术创新(2021年28期)2021-10-20
建材发展导向(2021年13期)2021-07-28
导航定位学报(2021年3期)2021-06-19
合肥工业大学学报(自然科学版)(2020年7期)2020-08-05
电子制作(2019年19期)2019-11-23
电子制作(2019年15期)2019-08-27
电子制作(2017年13期)2017-12-15
商业文化(2017年28期)2017-11-01
发明与创新·中学生(2015年9期)2015-09-05
空间控制技术与应用(2015年4期)2015-06-05
