CBTC系统列车识别与追踪技术研究
2015-06-28 14:52:52刘中举
铁路计算机应用 2015年7期
张 博,杨 展,刘中举
(西南交通大学 信息科学与技术学院,成都 611756)
计算机与通信信号
CBTC系统列车识别与追踪技术研究
张 博,杨 展,刘中举
(西南交通大学 信息科学与技术学院,成都 611756)
列车识别与追踪是列车运行监控的基础。本文就CBTC系统列车识别与追踪技术,通过ATS仿真平台中实际站场图例,对列车识别与追踪实现过程中需要的线路基础数据和车次号追踪的实现方法进行探讨。应用Visual C++6.0平台根据实际线路进行仿真验证。
CBTC;仿真平台;列车识别与追踪;车次号
近年来,城市化进程的不断加快对城市轨道交通信号系统提出了新的要求。基于通信的列车控制(CBTC,Communication Based Train Control)系统以其轨旁设备少、线路追踪间隔时间短、运输效率高等特点,发展迅速,逐渐成为城市轨道交通信号系统的主流。我国第一条地铁线路的成功开通,标志着城市轨道交通信号技术进入发展高峰期。本文根据项目经验,对CBTC系统列车识别与追踪技术进行探讨。
1 CBTC系统特点
CBTC是基于通信的列车控制系统,通过移动闭塞技术来缩短运行间隔,从而提高列车的运行效率和系统的灵活性。在CBTC系统中,车载控制器(VOBC)主动地进行列车的测速和定位,将列车位置信息通过无线通信发送到轨旁区域控制器(ZC),ZC负责追踪线路上所有列车并为列车计算移动授权(MA),VOBC根据ZC计算的MA命令来控制列车的安全运行,并确保在任何最不利情况下,列车不会超越目标距离和目标速度。
2 ATS系统仿真平台简介
列车自动监控(ATS,Automatic Train Supervision)系统仿真平台是对ATS系统从配置到功能的逼真模拟。本设计中的ATS系统仿真平台,主要由ATS模拟子系统、列车模拟子系统和联锁模拟子系统组成。
其中ATS模拟子系统提供ATS系统全部功能,实现列车识别与追踪、列车运行调整等。列车模拟子系统主要实现对列车的模拟运行,模拟列车在调度员的调度命令下,根据联锁模拟子系统有关信号设备状态信息控制列车运行。联锁模拟子系统是对ATS系统联锁功能的模拟,接收调度员各项联锁操作命令,控制轨旁信息设备状态变化,然后把这些状态变化信息反馈在ATS系统监控界面上。
3 列车识别与追踪概述
CBTC系统列车识别与追踪的任务是完成对系统内所有列车的实时动态跟踪。列车车次号是CBTC系统对列车进行识别与追踪的基础,对列车的识别与追踪是根据车次号实现的。一般当列车从车库或车辆段出发进入“转换轨”时,表明该列车即将进入正线投入运营,调度员需要对该列车进行有效的监控,因此系统开始对列车进行识别与追踪,直至列车到站折返或者列车回库返回车辆段,离开“转换轨”时,表明列车离开正线,退出运营。
当列车失去车次号或具有一个不正确的车次号时,CBTC系统就不可能对其进行正确的识别与追踪,就无法对列车运行监控及调度指挥。正常运行的列车都与一个特定的车次号相关联,CBTC系统根据该唯一的车次号对全线列车进行识别与追踪,车次号随着列车的运行,将沿着列车运行线路从一个区段的车次窗内传递到另一个区段的车次窗内,列车车次号在车次窗中传递的过程正是系统对列车进行识别与追踪的过程。
4 列车识别与追踪设计
CBTC系统是基于无线通信的列控系统,车-地之间信息交互不再依赖于轨道电路而是采用连续、高速、双向的无线通信技术,实现对列车实时连续的监督和控制。但是在实际工程中,当系统线路刚刚投入使用阶段,或者列车因为设备原因通信故障时,为了保证列车运行安全,绝大部分CBTC系统线路配备轨道电路(TBTC)或计轴设备作为后备系统保证列车的安全运行。所以对基于TBTC系统、CBTC系统以及TBTC系统和CBTC系统二者共存条件下的列车识别与追踪技术的研究具有一定的现实意义。
4.1 基于TBTC模式的列车追踪
基于TBTC系统的列车追踪也就是列车物理跟踪,是根据联锁信号设备状态变化按轨道电路自动跟踪列车运行位置。追踪过程如图1所示,列车从甲站驶往乙站。
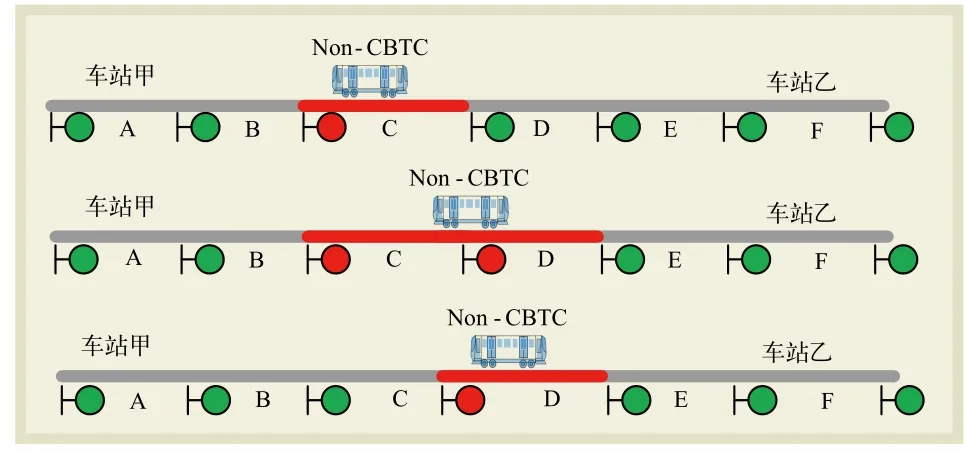
图1 列车物理追踪过程
(1)当区段C是占用状态,代表列车在C处,此时车次号显示在C所对的车次窗内;
(2)当区段C是占用状态,相邻区段D由出清变为占用,并且线路中不存在对向运行的列车时,说明列车正在从C向D移动,车次号显示在车头所在区段D的车次窗内;若考虑存在对向运行的列车,假如区段E空闲,则可以确定D是由列车从C驶向D引起的,当E也处于占用状态时,则无法确定D状态的变化是由哪一辆列车引起,需要等待轨道区段C和轨道区段E的状态变化确定车次号的移动;
(3)当区段C由占用变成出清,区段D保持占用时,代表列车已经完全越过C进入D,此时车次号仍然显示在D对应的车次窗内。
4.2 基于CBTC模式的列车追踪
在CBTC模式下,将一个物理区段划分为多个逻辑区段,每个逻辑区段都有单独的占用/出清检测,并且每个区段可进入多辆列车。当物理区段中某辆列车与地面失去通信时,该物理区段内的所有逻辑区段都要变为占用状态,此时该物理区段不允许新的列车进入。追踪过程如图2所示。
4.3 TBTC系统和CBTC系统共存时的列车追踪
由于运营需求或者通信故障等原因,线路上可能同时运行通信列车和非通信车,因此系统需要支持通信列车和非通信列车混跑追踪。对通信车可以采用CBTC模式追踪,对非通信车可以采用区段占用/出清逻辑检测追踪。追踪过程如图2所示。
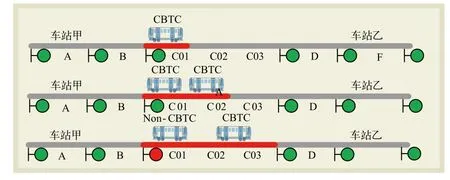
图2 逻辑追踪和列车混跑追踪过程
5 列车识别与追踪实现
CBTC系统对列车的识别与追踪是以站场线路数据的有效描述为基础实现的。本仿真系统主要以有向的线路拓扑结构图为支撑,管理列车车次号在车次窗内的显示,确定列车运行信息,实现对列车运行情况的实时监督与控制。
5.1 站场线路数据
站场线路数据是描述站场图中各信号设备的信息,主要包括信号设备的位置、信号设备之间的逻辑关系。列车在轨道线路上的运行路径是确定列车位置的基础,是实现列车识别与追踪的关键所在。为了能够更好更快地搜索列车在轨道线路上的运行路径,引入了有向无环图的概念。有向无环图(DAG,Directed Acycline Graph)是一种类似于树的数据结构,它有两个特点:(1)图中的节点通过有向边连接;(2)两个节点之间的有向路径是互斥的。
站场线路中主要有3种信号设备:信号机、轨道区段和道岔区段,列车在轨道线路上运行的路径也是由这3种设备组成的。下面以部分站场平面布置图为例进行说明。站场平面图如图3所示。

图3 举例站场平面布置图
将举例站场平面布置图中的信号机、轨道区段和道岔区段作为顶点,以连接顶点的设备为弧,以上行方向为有向无环图的方向,建立模型,如图4所示。此时搜索列车运行路径等价于在有向无环图中搜索一个顶点到另一个顶点的路径。例如信号机X2102到X2202的路径等价于D→H的路径(D→F→H)。
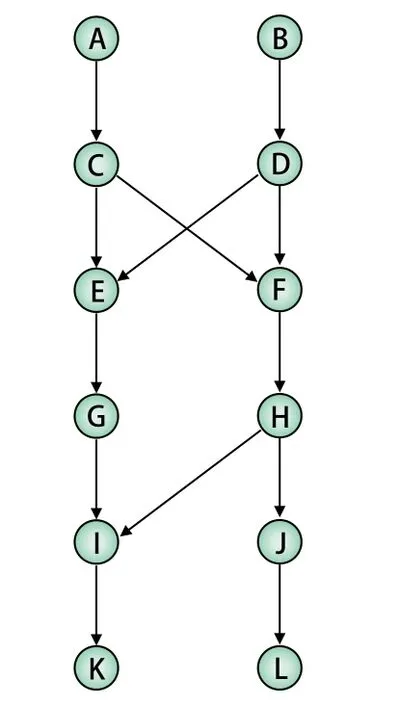
图4 站场的有向无环图
由于直接查找有向无环图中两顶点之间的路径比较复杂,但结合站场图的结构特性,发现其存在着特殊性,特殊在它的所有顶点的出度数都不大于2,这样的有向无环图与数据结构中的二叉树非常相似。所以,寻找一种能够在有向无环图中动态建立“二叉树”,然后对该“二叉树”进行遍历的方法可以实现对上述模型中两顶点之间的路径的搜索。如以顶点A为根建立二叉树,从根结点开始到叶子结点结束的路径就是信号机S2125到后续相关信号机的所有路径,如图5所示。
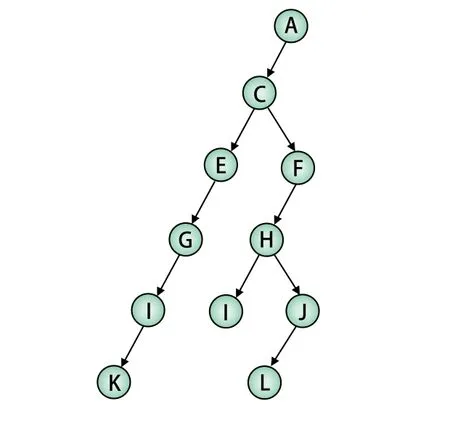
图5 以节点A为根的二叉树
采用前序遍历,节点C到节点K的路径为C→E→G→I→K,也就是信号机X2104到信号机X2304的路径,结合图3就可以得到X2104→X2304的路径经过的区段为D01、D03、G05、D05、G07,用这种方法就可以搜索站场图中的列车运行路径。
5.2 列车车次号追踪
从前面的分析,我们已经知道列车追踪分为基于TBTC的物理追踪和基于CBTC的逻辑追踪。
物理追踪的主要任务是根据轨道区段占用情况,对列车进行占用追踪和出清追踪。当轨道区段由占用变为非占用时,进行出清追踪;反之,当轨道区段由非占用变为占用时,进行占用追踪。
CBTC模式下,为了提高列车运行效率,将系统线路中的物理区段划分为多个逻辑区段,并对每个逻辑区段进行占用/出清检测,这样一个物理区段可以运行多辆列车,同时一辆列车也可以占用多个逻辑区段。当物理区段中某列车与地面通信中断时,为了防止其它新的列车进入该物理区段,防护该物理区段的信号机关闭,系统将物理区段内的所有逻辑区段都置为占用状态,失去通信的列车按照Non-CBTC模式,即TBTC模式运行,此时,系统按照Non-CBTC模式控制列车运行。
当发生CBTC模式的列车因为通信中断等原因降级为Non-CBTC模式的列车,或者是CBTC模式的列车与Non-CBTC模式的列车混跑时,其追踪过程如图6所示。

图6 CBTC模式列车和非CBTC模式列车混跑追踪
5.3 列车追踪仿真实例
鉴于篇幅限制,只对TBTC模式下的列车追踪进行仿真。
TBTC模式列车10201从轨道区段T0104到轨道区段T0108的追踪过程如图7所示。
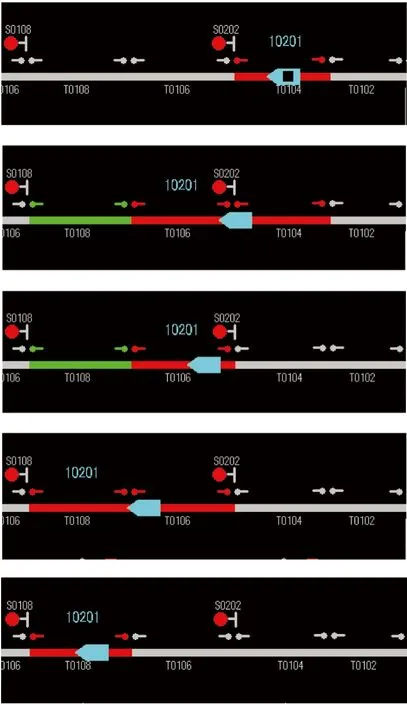
图7 TBTC模式列车追踪效果图
6 结束语
列车识别与追踪是列车运行监控的基础,是列车运行调整、列车自动进路等ATS系统功能的重要保障,正确而准确的列车识别与追踪是CBTC系统正常运行的前提。研究CBTC系统不同控制模式下的列车识别与追踪不仅为调度员准确监督列车运行,进行列车控制提供保障,同时对提高CBTC系统自动化服务水平,提高城市轨道交通信号系统的安全性、可靠性都有着深远的意义。
[1]中国交通运输协会城市轨道交通专业委员会.城市轨道交通信号系统ATS技术规范[S].北京:中国交通运输协会城市轨道交通专业委员会,2009.
[2]张德明.CBTC制式下的ATS子系统的研究[J].铁道通信信号,2009(12).
[3]IEEE Std 1474.3-2008. IEEE Recommended Practice for Communications-Based Train Control (CBTC) SystemDesign and Functional Allocations[S].IEEE vehicular Technology Society. The Institute of Electronics Engineers, Inc, 2008.
[4]张太花.ATS列车追踪的设计与实现[D].成都:西南交通大学,2013.
[5]田晓莉.基于CBTC的ATS列车识别与跟踪技术研究[D].成都:西南交通大学,2013.
[6]Kenneth Diemunsch.Track Circuit Failures Their Impact on Conventional Signaling in CBTC Projects[J].IEEE Vehicular Technology Magazine,2013(8).
责任编辑 王 浩
Train identif i cation and tracking in CBTC system
ZHANG Bo, YANG Zhan, LIU Zhongju
( School of Information Science & Technology, Southwest Jiaotong University, Chengdu 611756, China )
Train identification and tracking were the base of train supervision. This paper mainly analyzed the technology of train identification and track, according to station graph example of the ATS simulation platform, analyzed the basic data in the designing and implementation process of the train identif i cation and the implementation method of train identif i cation number track. Finally, through the Visual C++ 6.0 platform, this theory was simulated and verif i ed based on the actual line data.
CBTC; simulation platform; train identif i cation and tracking; train number
U284.55∶TP39
A
1005-8451(2015)07-0045-04
2014-11-24
张 博,在读硕士研究生;杨 展,在读硕士研究生。
猜你喜欢
科学技术创新(2023年23期)2023-10-14 02:53:18
铁路通信信号工程技术(2022年6期)2022-06-27 08:37:52
有色设备(2021年4期)2021-03-16 05:42:32
铁道运营技术(2020年4期)2020-10-13 05:25:58
铁道通信信号(2020年1期)2020-09-21 08:55:16
铁道通信信号(2016年8期)2016-06-01 12:10:21
铁道通信信号(2016年2期)2016-06-01 12:10:18
铁路技术创新(2015年3期)2015-12-21 12:55:48
中国铁道科学(2015年6期)2015-06-21 06:54:54
铁路通信信号工程技术(2014年6期)2014-02-28 16:58:39