
TM65m射电望远镜L、S、C、X频段天线性能测量∗
2015-06-27 02:09王锦清12赵融冰12虞林峰12殷海玲3劳保强14吴亚军12斌12健12蒋甬斌12博12左秀婷12苟伟12文12伍筱聪12陆雪江12刘庆会12范庆元12蒋栋荣12钱志瀚12
天文学报 2015年3期
王锦清12赵融冰12 虞林峰12 殷海玲3 劳保强14吴亚军12 李 斌12 董 健12 蒋甬斌12 夏 博12 左秀婷12苟 伟12 郭 文12 伍筱聪12 陆雪江12 刘庆会12 范庆元12蒋栋荣12 钱志瀚12
(1中国科学院上海天文台上海200030)
(2中国科学院射电天文重点实验室南京210008)
(3上海新竹园中学上海200122)
(4桂林电子科技大学桂林541004)
TM65m射电望远镜L、S、C、X频段天线性能测量∗
王锦清1,2†赵融冰1,2 虞林峰1,2 殷海玲3 劳保强1,4吴亚军1,2 李 斌1,2 董 健1,2 蒋甬斌1,2 夏 博1,2 左秀婷1,2苟 伟1,2 郭 文1,2 伍筱聪1,2 陆雪江1,2 刘庆会1,2 范庆元1,2蒋栋荣1,2 钱志瀚1,2
(1中国科学院上海天文台上海200030)
(2中国科学院射电天文重点实验室南京210008)
(3上海新竹园中学上海200122)
(4桂林电子科技大学桂林541004)
报告了上海天马65 m射电望远镜(简称TM65m)4个低频(L、S、C、X)段的天线效率、灵敏度以及系统噪声温度的性能测试情况.首先介绍了射电天文接收系统的关键指标,接着对测试方法进行了论述,并对误差进行了评估.最后给出了TM65m上4个低频段的天线效率、灵敏度以及系统噪声温度的测试情况,测试结果表明:在C和X波段,副面位置固定时,在高低俯仰角上效率和灵敏度下降剧烈,当启动副面(随动)模型后,在全仰角范围内,效率可以控制到60%以上.系统噪声温度与副面模型无关,在4个波段中C波段的灵敏度和系统噪声温度最佳.
大气效应,技术:雷达天文,宇宙背景辐射
1 概述
上海TM65m是目前国内口径最大的实面射电望远镜,其工作波段覆盖L、S、C、X、Ku、K、Ka、Q 8个波段,是目前国内波段最全的射电望远镜.该射电望远镜采用卡塞格林式天线结构,主面直径65 m,具有主动面机构,用于高频观测时补偿主面面形的重力变形.副面直径6.5 m,安装于一个6杆机构平台上,可以根据不同的俯仰角度调整副面姿态(即启动副面随动模型),以补偿由于重力和撑腿形变导致的副面相对主面的位姿变化.当前该天线已经配备了L、S、C、X低频波段4套接收机,其中S/X为双频馈源,其余均为单频馈源.
天线效率、系统噪声温度以及灵敏度是射电望远镜的3项关键指标.影响抛物面天线效率的关键因素主要有:天线口面的照明设计、天线面精度、副面和撑腿等遮挡、天线的指向误差、天线面的欧姆损耗以及周围的噪声情况.射电望远镜的系统噪声温度除了包含天馈部分和接收机的噪声外,还包含天空大气辐射噪声以及地面辐射泄漏噪声.一般情况下,天线面、馈源、极化器和接收机4者的噪声级联总和可以用来评估天线微波系统的噪声性能,因为致冷低噪声放大器(Low Noise Ampli fi er,LNA)的增益通常可达30 dB以上,后级链路的噪声将被弱化至1/1000左右,因此后级链路的影响可以忽略.在射电天文领域,天线的灵敏度通常采用系统等效流量密度(System Equivalent Flux Density,SEFD)来衡量,定义为系统噪声温度和单位流量天线温度(Degrees Per Flux Unit,DPFU)的比值.因此,灵敏度的提高可以通过降低系统噪声温度来实现,也可以通过提高单位流量天线温度来达到目的.
本文先论述了射电法测试天线效率的方法,然后对效率、系统噪声温度以及灵敏度测试过程中的若干注意点进行了阐述,最后给出了TM65m射电望远镜低频段的实际测试情况,同时测试了副面随动模型启动情况下C和X波段的性能,并对测量的性能进行了一定的分析.
2 天线效率测试方法
为了测量射电望远镜的效率,可以采用流量已知的射电源[1],对天线接收到的功率进行测量,然后与理想的抛物面收到的功率作比较,用比值表示为η(φ),其中φ为天线俯仰角.

式中各参数的定义如下:k为波尔兹曼常数(1.38065×10−23J/K);Tas为射电源引起的天线噪声温度(单位为K);S为某一历元的射电源流量密度(单位为Jy);K1为大气吸收改正因子,通过计算,其中V为常数,可由大气吸收衰减曲线查得,K1值是大气模型计算得到的大气吸收衰减值;K2为射电源角扩展修正因子,点源情况下,可以令K2=1; K3为射电源流量随时间变化的修正因子,当流量随时间恒定时,K2=1;K4为射电源的流量密度随频率变化的修正因子,当流量随频率恒定时,K4=1,否则代入修正曲线或查表;K5为射电源的偏振修正因子,偏振流量可以忽略时,K5=1;Ag为天线的几何面积(单位为m2).上式在使用过程中,包含了多种误差需要考虑,对于65 m量级的大口径射电望远镜,其波束角度范围(X波段8.4 GHz时为140′′)十分窄,比某些射电源的角径要小,以致天线波束对上这些源时,只收集了部分源流量,上述角扩展修正因子K2就是为补偿这个因素导致的损失,然而K2的确定本身有一定的误差,而且是修正项中最大的误差项[2−4],因此测量中尽量采用点源观测,以避免修正因子的影响.另外K1是跟大气、仰角相关的修正量,一般采用模型计算或查表获得,这也会贡献误差.上式使用时,假设天线具有理想的指向性能,在实际工作时,需要确认天线的指向误差,或者考虑因为指向偏差导致的效率损失.另外,源流量偏差也是导致测量误差的一个因素[1].表1给出了4个低频段效率的设计指标.

表1 低频段效率设计指标Table 1 The design indexes in lower frequency bands
3 系统噪声温度测试方法[5]
系统噪声温度为整个链路中各部件等效噪声温度的级联,简易表示如下式:

其中Tsys为整个天线系统噪声温度;Tfeed为常温下馈源网络(包含极化器)插入损耗对应的等效噪声温度;TR为致冷接收机噪声温度;Tsky为来自天空的噪声温度,主要从天线方向图的主瓣进入链路;Tgnd为地面辐射泄漏,主要从天线方向图的旁瓣和后瓣进入链路;Tant为天线欧姆损耗,主要由天线反射面损耗导致.需要指出的是,上述(2)式的表达方式并非严格,因为并未考虑级联问题,这只有当级联部件的插入损耗小于0.1 dB时可以近似使用,现有的测量资料表明这种近似算法带来的Tsys误差约为0.035 K左右.
在cm波段测量天线的系统噪声温度通常采用Y因子法,即先对系统输入一个已知噪声温度的白噪声信号,得到一个输出功率;再让系统对向冷空,得到第2个输出功率;两者的比值为Y因子,通过Y因子可以计算出系统噪声温度.但是对于cm波段,以TM65m为例,L、C、S、X的馈源口面直径尺寸依次为:1.6 m、0.66 m、0.91 m、0.91 m,常规黑体尺寸通常在0.5 m左右,在常温下可以通过多块拼接的方式进行覆盖,这在天线天顶方向可以人工操作,而在天线工作仰角上,则无法人工覆盖.对于不同的输入信号,实现手段上有所不同,当前主要采用冷热负载、空间亮温恒定区域以及定标噪声源等作为已知输入亮温进行测试.目前我们采用了定标噪声源法,一般通过在接收机LNA前端耦合入一个已知噪声温度为Tcal的噪声信号,然后再通过如下(3)式的比例式可以计算出系统噪声温度值:

其中Pb为天线指向天空背景时的功率读数;P0为接收系统零点功率读数;Pn为天线指向天空背景时开启噪声源后的功率读数,等式右侧比例项即为1/Y.
采用该方法的最大优势是可以在任意俯仰角位置上实时测量Y因子,进而解算得到包含大气在内的系统噪声温度,而不利之处是噪声源定标值存在一定的偏差.通常定标值是在实验室采用冷(液氮温度77 K)热(常温300 K)负载法标定的,即噪声源注入关闭状态下,在馈源口分别提供常温300 K(T300)和液氮温度77 K(T77)负载.这可以通过把黑体分别置于常温和液氮中来实现上述两个温度负载,记录两个物理温度输入时对应的输出功率的比,得到Y因子测量值如下:

由此可以计算得到TR+Tfeed,然后把噪声源注入开启,重复上述测量,可以得到另外一个Y因子,并计算得到新的TR+Tfeed,让其与前面噪声源注入关闭时得到的TR+Tfeed作差,即得到了噪声注入的定标值.这种标定方法的偏差约1∼2 K,而且噪声源的定标值随着温度变化会有所变化,这在高频段的噪声源会更加明显.为了更准确地确定噪声定标值,可以在接收机安装到天线上后,采用冷空和常温负载构成的Y因子法校核实验室的噪声定标值,由于冷空的温度比77 K更低,因此该Y因子比实验室采用液氮冷负载定标时的Y因子更大,普遍可以达到10 dB左右,因此标定误差更小些.图1给出了C波段左旋噪声定标值实验室标定和天线标定的偏差情况,可以看到在4.5 GHz以下,两种标定结果符合度更好些,随着频率的升高,标定偏差逐渐增大,在6.5 GHz以后约有1 K左右的恒定偏差,而且随频率的变化趋势完全一致,C波段上我们采用了两档噪声注入,分别约为50%和5%.图中LCP-High-Tcal和LCP-Low-Tcal分别为左旋高、低噪声注入现场定标值(即采用冷空和常温负载构成的Y因子法),LCP-High-Tcal-Lab和LCP-Low-Tcal-Lab为实验室定标Tcal(即采用液氮温度77 K和常温300 K负载构成的Y因子法).在4.2∼4.4 GHz以及5.7∼5.8 GHz处由于外界存在强干扰信号,因此采用冷空和常温负载构成的Y因子法时出现了异常,其余频段与实验室测量趋势一致.
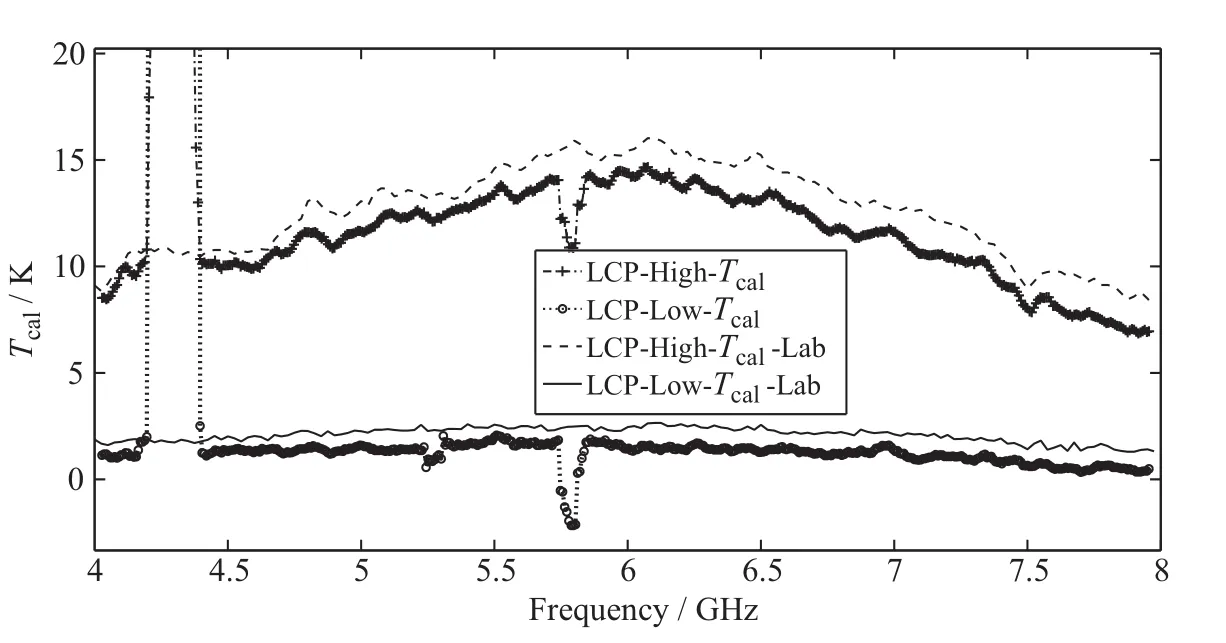
图1 Tcal实验室标定和现场标定Fig.1 Tcalcalibrated in laboratory and fi eld
采用常温T300和冷空负载两个负载获得Y因子后,包含大气的系统噪声温度可以表示如下:

其中T300为常温负载的物理温度,TR+Tfeed为接收机和馈源实验室测量值,允许带有一定的误差.图2给出了Y因子为9.5 dB、10 dB以及10.5 dB的情况下,TR+Tfeed有一定偏差时对Tsys值的影响,可以看到,在Y因子一定时,TR+Tfeed实验室测量值即使有9 K的偏差,对最终的Tsys影响也只有1 K.通常实验室的标定误差为1∼2 K左右,T300值是黑体的物理温度,采用温度计测量普遍可以精确到0.5°C以内,由此可以估算Tsys的实际测量偏差大约只有0.2 K左右,因此采用常温和冷空Y因子法测量系统噪声温度具有很高的准确度(关于系统噪声温度更为详细的研究和测量工作已经在文献[5]中展开).
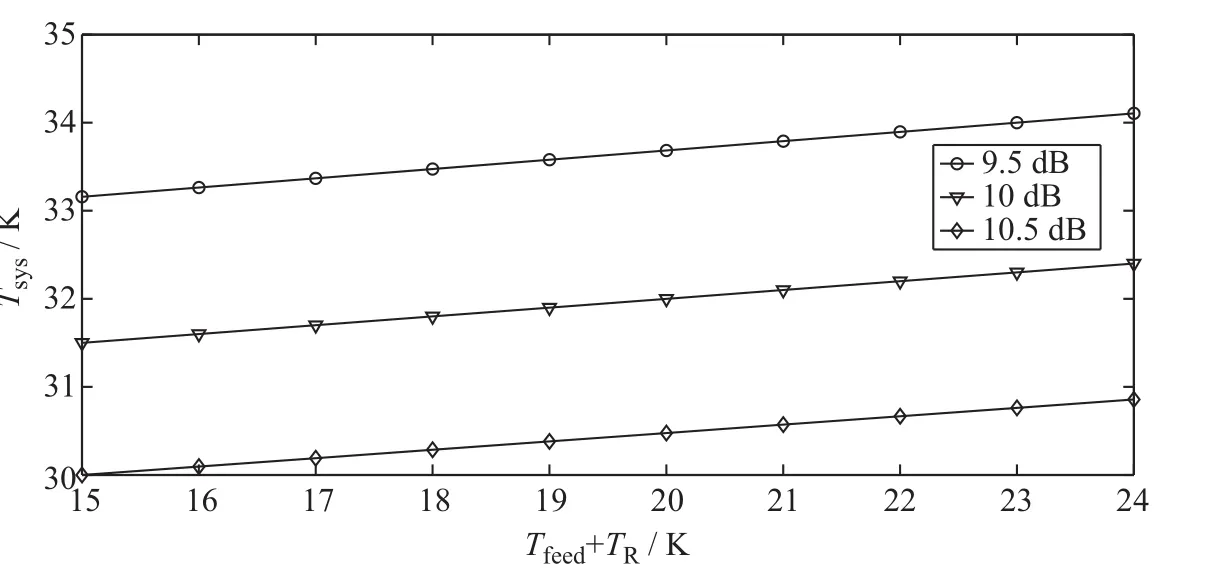
图2 接收机噪声(馈源和接收机噪声)和系统噪声温度Fig.2 The receiver noises(feed and receiver noises)and system noise temperature
4 灵敏度测试方法
射电天文经常使用系统等效流量密度SEFD作为灵敏度的评估指标,该量为系统噪声温度Tsys与单位流量天线温度(DPFU)的比值,这个值越小表明灵敏度越高.设天线直径为D,效率为η,DPFU和SEFD的计算公式如下:

其中Ae是天线有效面积,SU=1 Jy,为单位流量密度.由(7)式可知,当系统噪声温度和天线效率确定后,SEFD也就确定了.射电望远镜可以检测到的最小天线温度或流量密度可以用以下公式表示[6]:
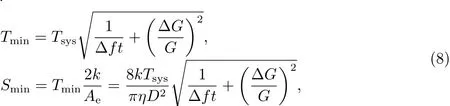
其中∆f为有效带宽;t为积分时间;G为接收机增益,∆G为增益变化量.从该式可以大致看出,接收机的增益稳定性对最小可检测流量密度影响很大,因为通过宽带观测和加长积分时间实现,项可以非常小,但是做到1/1000已经不易.目前可以通过注入周期噪声的方法,把短时的增益变化扣除,当然这对数据同步和解算增加了一定的工作量.
5 实际测试误差分析
5.1 理论分析
在测试过程中需要确定射电源流量导致的天线噪声温度Tas,这里采用定标噪声源来测量,测量步骤如下:
(a)天线指向冷空时,功率读数为Rb,对应噪声温度为TRe+Tb,TRe为接收系统等效噪声温度,Tb为天空背景噪声;则系统噪声温度其中R0为前端信号不接入时,终端的零点功率读数;RN为噪声源开启后,由终端读取的功率读数.
(b)天线指向射电源时,功率读数RS,对应噪声温度为TRe+Tb+Tas.如果噪声源在宽带的各个频率点都定标准确,则可以通过噪声定标源来计算,如下在(a)的基础上开启噪声管,功率读数RN,对应噪声温度为TRe+Tb+Tcal.利用功率读数与输入功率的线性关系,有

式中M为常数,则
(c)测量RS、Rb、RN代入上式即可算出Tas.
(d)通过测出的Tas值,根据(1)式即可算出天线效率.如果采用点源进行效率测量,则误差的主要来源为天线温度的测试误差、源流量误差、噪声源定标误差以及大气改正因子K1误差,可表示为

若以图3中右旋为例,Rb=8830,∆Rb=6,RN=15350,∆RN=9,RS=9580,∆RS=8,噪声管定标误差假设为
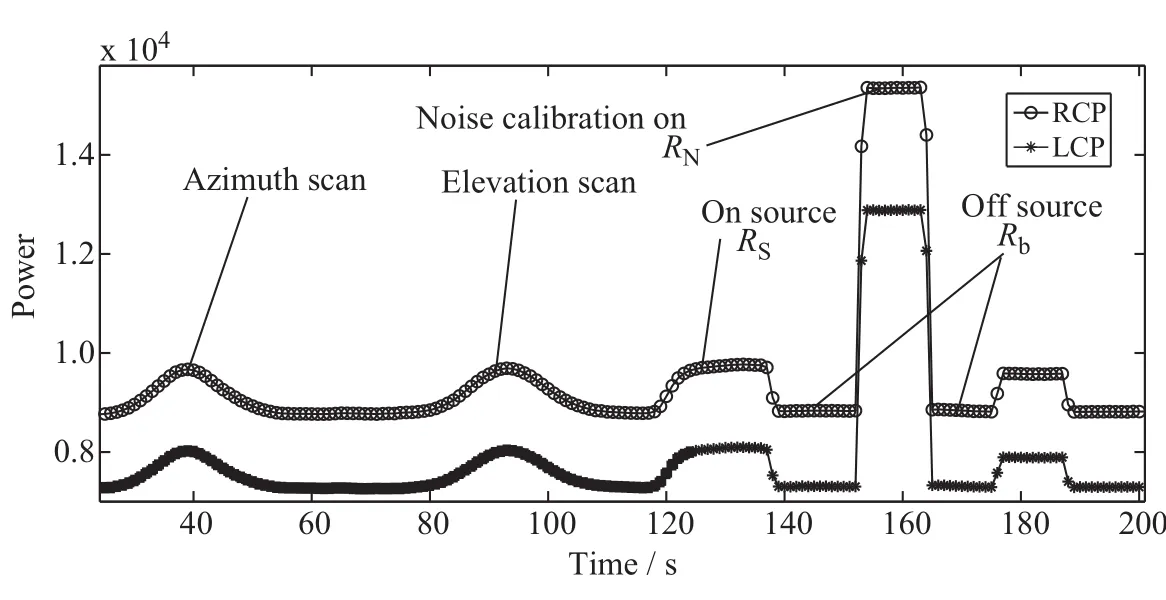
图3 3C286在8.4 GHz处带宽为20 MHz的测试记录Fig.3 The testing record of 3C286 at 8.4 GHz with 20 MHz bandwidth


5.2 天线性能测试
为了尽量避免温度等环境因素对天线性能测量的影响,我们选择在晴朗的夜晚,采用3C286、3C123等校准射电源作为测量目标,射电源的流量[7]曲线见图4.在整个俯仰角范围内对多个波段接收系统的左右旋接收链路进行了天线效率、系统噪声温度和灵敏度测量,连续测量带宽为512 MHz,谱分辨率1 MHz,一般情况下功率检波带宽采用20 MHz,积分时间1 s,而对于干扰较多的L和S波段则采用5 MHz或更窄的带宽.对于X和C波段,在整个俯仰角的多个测量角度上,分别进行副面随动和固定两种情况的测量.在每种情况下进行测量时,先采用了十字扫描法进行指向精度修正,以纠正全天区指向模型的残余误差,保证测量过程中指向误差在1/10波束宽度以内,然后控制天线指向射电源、偏开射电源、开启噪声源,此时积分后的功率值随时间变化类似于图3.此外,对于C波段4∼8 GHz的宽带接收机,我们分别测试了3个频点上的性能,以便于天文观测时效率曲线的修正.对于副面随动,我们采用的模型控制如(11)∼(12)式,分别为副面重力Y方向控制模型和聚焦Z方向的控制模型,模型的仿真、实测曲线见图5∼6,其中仿真模型采用了中电五十四所的有限元仿真模型,实测数据采用了射电源方法[8].

其中A、B、C、D为拟合系数.
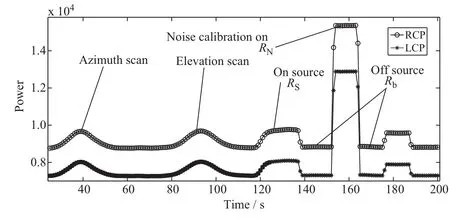
图4 校准射电源流量密度Fig.4 The fl ux densities of the calibrated radio sources
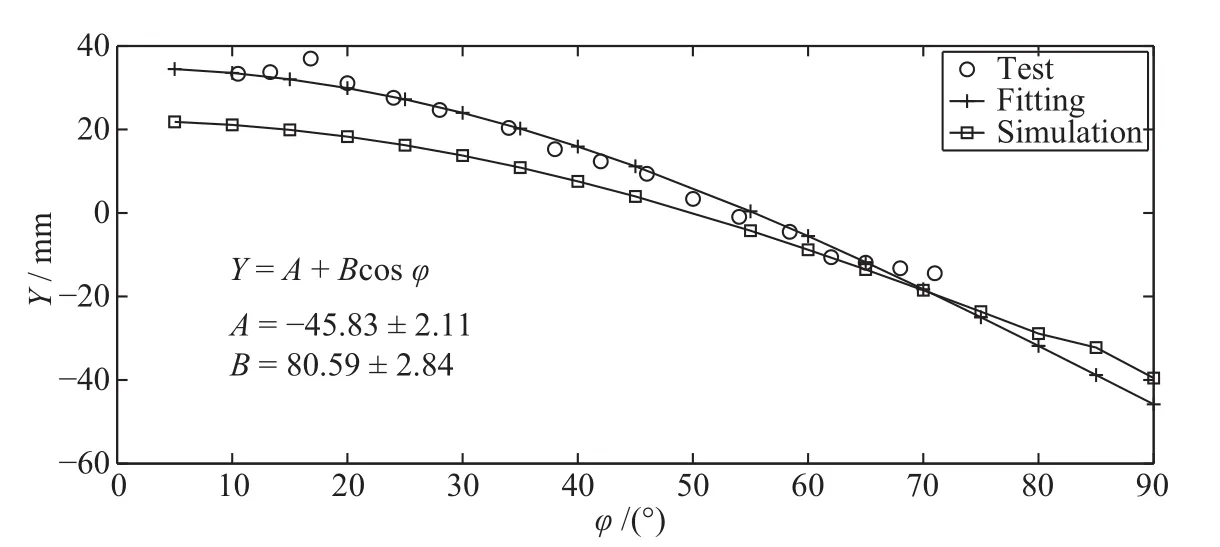
图5 Y方向副面调整模型Fig.5 The adjusted model for the sub re fl ector inYdirection
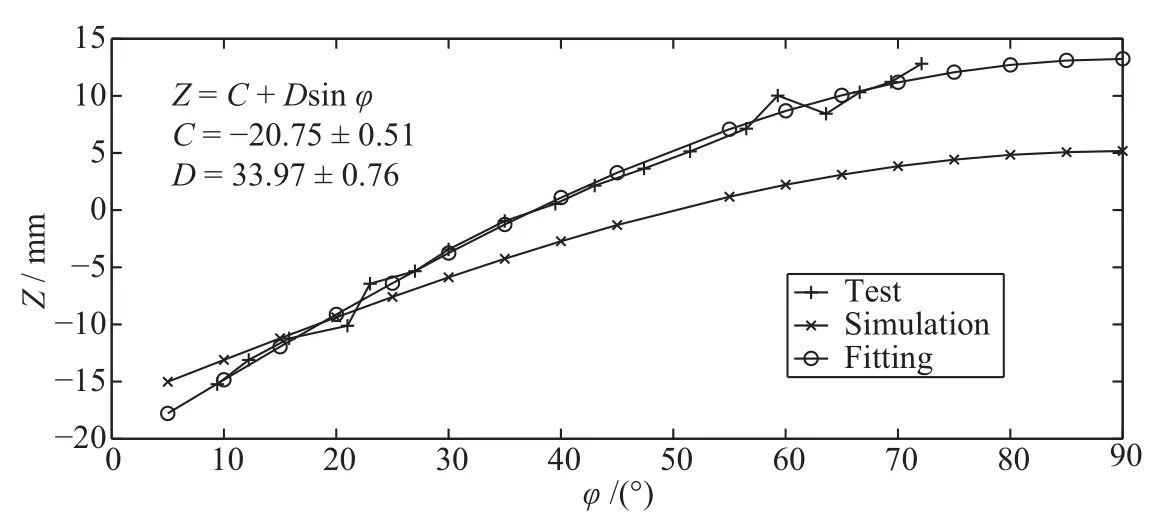
图6 Z方向副面调整模型Fig.6 The adjusted model for the sub re fl ector inZdirection
5.2.1 天线效率测量
在实际测量过程中我们选用3C48、3C147、3C286、3C295、3C138等校准射电源,这些源在L、C、S、X波段的流量密度都在3 Jy以上,致密、角径小、流量稳定且可以精确计算.为了得到整个俯仰角范围内的效率(灵敏度和系统噪声温度亦然),需要在多个仰角位置进行多次测量.表2给出了副面固定时,4个频段归一化效率曲线随俯仰角的拟合因子,表3给出了副面随动情况下C和X两个波段的归一化效率曲线的拟合因子以及最佳效率值和俯仰角.图7∼12分别给出了4个波段的效率随仰角的变化情况,图7中VP为垂直极化,HP为水平极化.可以看出,L和S波段天线效率随仰角的变化不明显,而在X波段则十分明显,这主要是因为副面支撑的变形对高频段影响更剧烈,见图9,其中LCP为左旋,RCP为右旋,LCP-SR为副面随动情况下的左旋,RCP-SR为副面随动情况下的右旋.可以看到在副面固定时,高低仰角上效率下降十分剧烈,10°和85°俯仰角时效率下降25%左右,而副面随动后,天线效率在整个俯仰角上可以控制到60%以上.图10∼12给出C波段不同频率上效率曲线的测试情况,在高低仰角处天线效率下降明显,图13∼14则给出了副面随动前后效率曲线的拟合情况.需要说明的一点是,理论上左右旋的效率曲线应当是相同的,而实际测量时由于噪声源定标的误差导致了效率曲线的差异.从图13∼14中可以看到,差异最大的是7.5 GHz处左右旋的效率曲线,约有4%的差别,从3.1节分析可知,对应的定标误差约0.5 K(在噪声定标10 K时,相对定标误差5%),而其余两个频点上的效率曲线左右旋符合都较好,效率偏差低于1%,由此估算定标偏差好于0.13 K(在噪声定标10 K时,相对定标误差好于2%),并且左右旋效率曲线随仰角的趋势变化完全相同,这可以从图13∼14中得到验证.
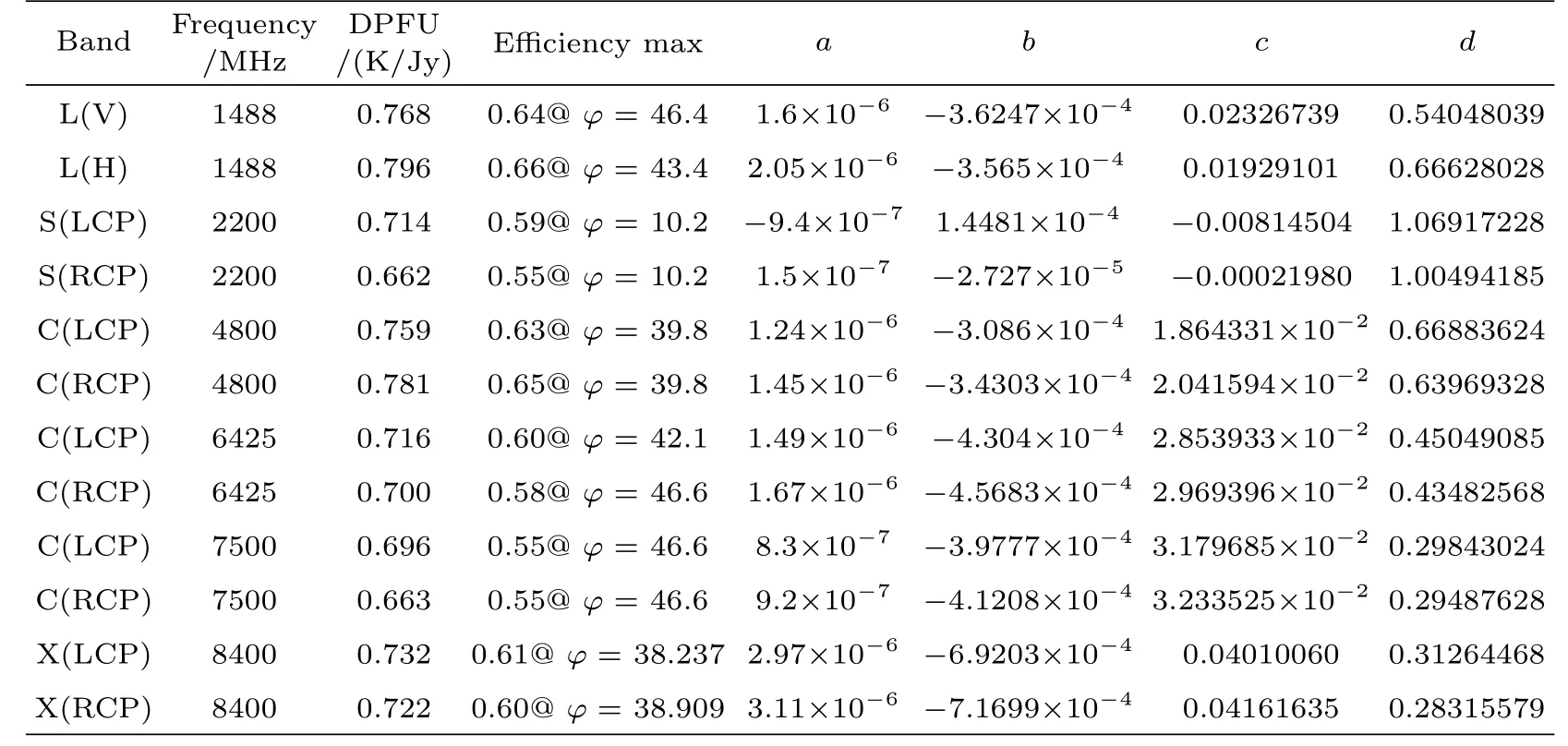
表2 4个频段在副面固定时效率曲线的测试Table 2 The tested efficiency curves in four frequency bands for a fi xed position of sub re fl ector
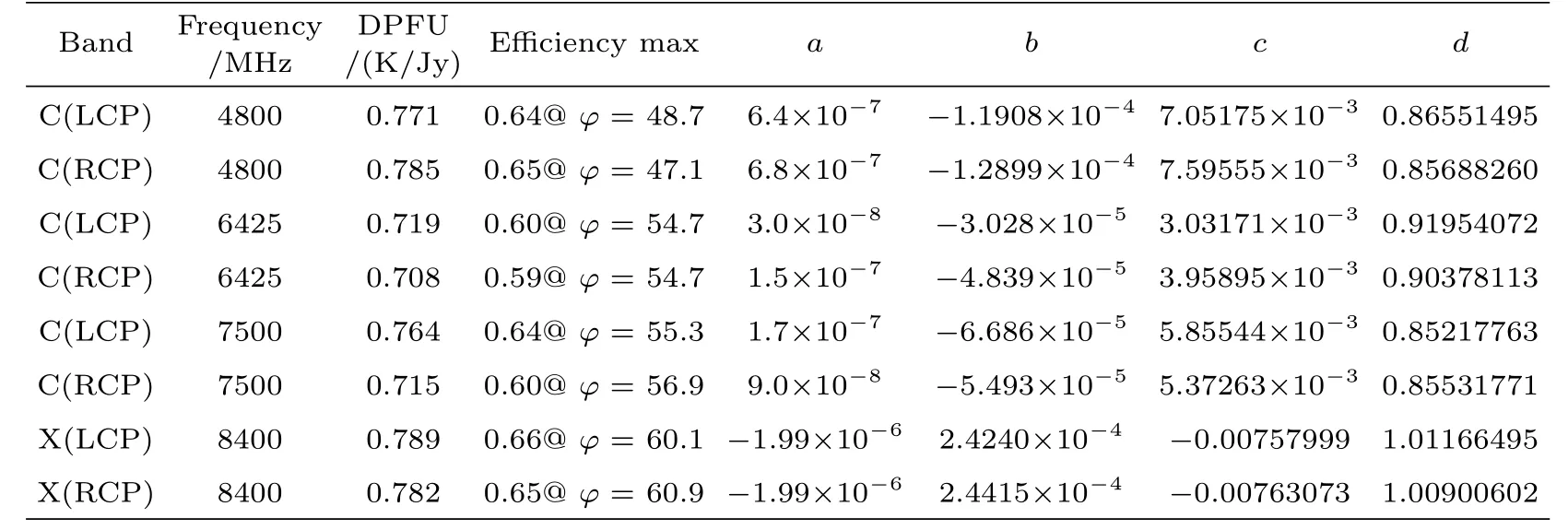
表3 C、X波段副面随动时效率曲线的测试Table 3 The tested efficiency curves in C and X frequency bands for a moving position of sub re fl ector
5.2.2 灵敏度测量
图15∼18给出了4个波段的SEFD测试情况,在低仰角处,由于系统温度的上升, SEFD将变大(即灵敏度下降);而在高仰角处,由于效率下降,同样导致了SEFD将变大.
由于SEFD的测试误差并不受制于噪声源定标误差,因此,对于频带覆盖较宽的波段,研究不同频率上的灵敏度是有必要的.图19给出了C波段3个频点4 800 MHz、6 425MHz、7 780 MHz上的右旋灵敏度情况,可以看到,随着频率的上升,在每个俯仰角上对应的灵敏度呈下降趋势,而在最佳仰角55°上SEFD则相同,都为27 Jy左右.在副面随动时,由图20可知,3个频点上灵敏度与俯仰具有一致的变化规律.在副面随动情况下,图20∼21给出了C和X两个波段的SEFD值随俯仰角的变化情况,可以看到,在高低俯仰角上副面随动后SEFD有较大的改善,X波段基本改善一倍,C波段有1/3左右的改善.

图7 3C123在1.488 GHz处带宽为2 MHz的L波段效率测试Fig.7 The measurement of L band efficiency of 3C123 at 1.488 GHz with 2 MHz bandwidth
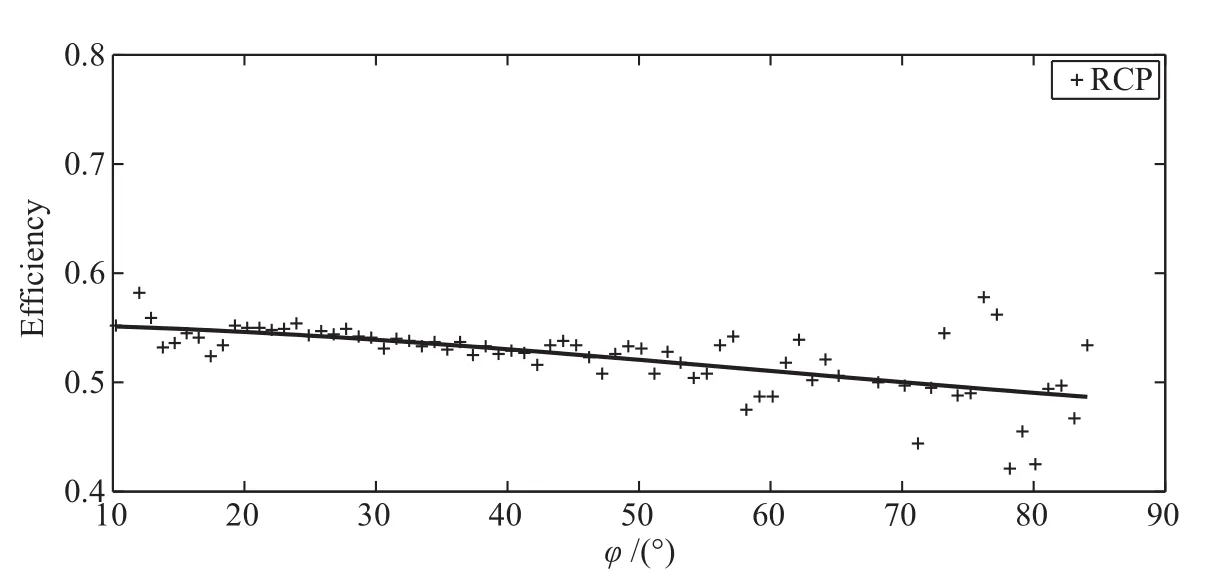
图8 3C123在2.2 GHz处带宽为20 MHz的S波段右旋效率测试Fig.8 The measurement of S band RCP efficiency of 3C123 at 2.2 GHz with 20 MHz bandwidth

图9 3C286在8.4 GHz处带宽为20 MHz的X波段左右旋效率测试Fig.9The measurement of X band LCP&RCP efficiencies of 3C286 at 8.4 GHz with 20 MHz bandwidth
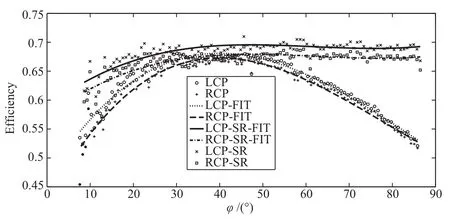
图10 3C286和3C123在4.8 GHz处带宽为20 MHz的C波段左右旋效率测试Fig.10The measurement of C band LCP&RCP efficiencies of 3C286&3C123 at 4.8 GHz with 20 MHz bandwidth
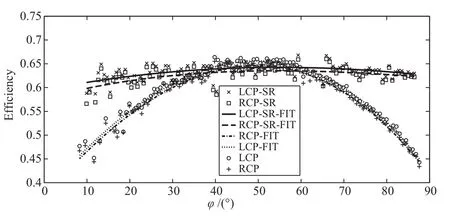
图11 3C286和3C123在6.425 GHz处带宽为20 MHz的C波段左右旋效率测试Fig.11The measurement of C band LCP&RCP efficiencies of 3C286&3C123 at 6.425 GHz with 20 MHz bandwidth
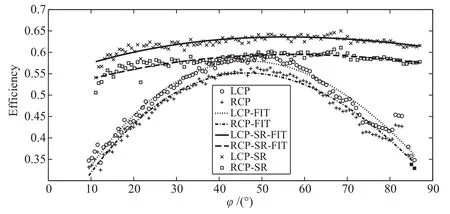
图12 3C286和3C123在7.5 GHz处带宽为20 MHz的C波段左右旋效率测试Fig.12The measurement of C band LCP&RCP efficiencies of 3C286&3C123 at 7.5 GHz with 20 MHz bandwidth
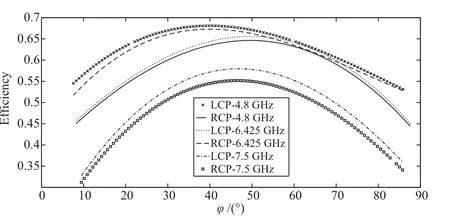
图13 副面固定时C波段左右旋效率曲线Fig.13 The curves of C band LCP&RCP efficiencies for a fi xed position of sub re fl ector
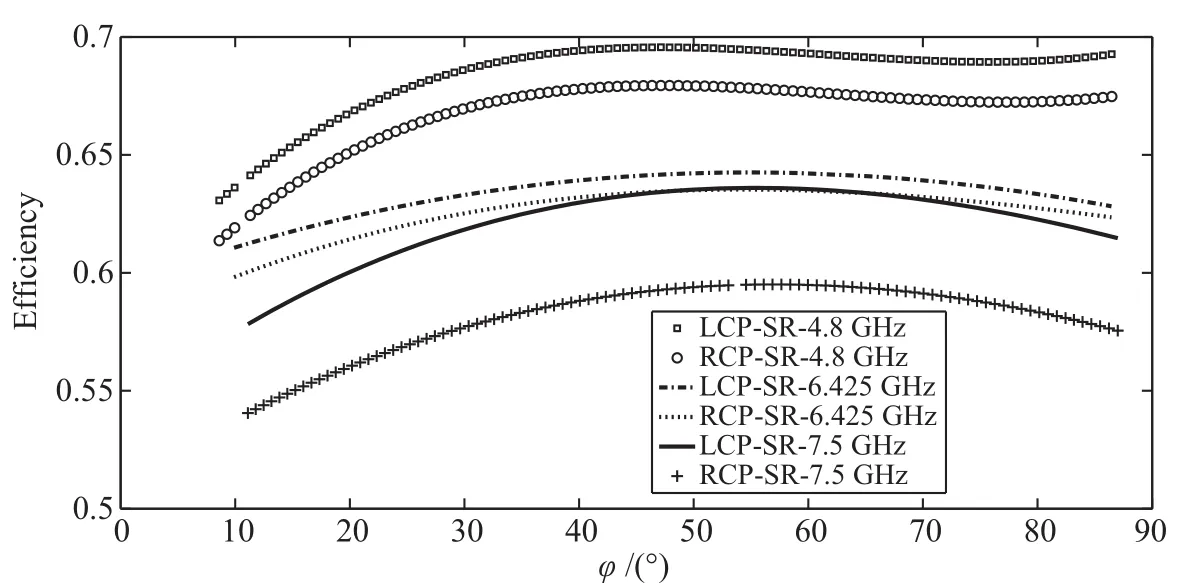
图14 副面随动时C波段左右旋效率曲线Fig.14 The curves of C band LCP&RCP efficiencies for a moving position of sub re fl ector
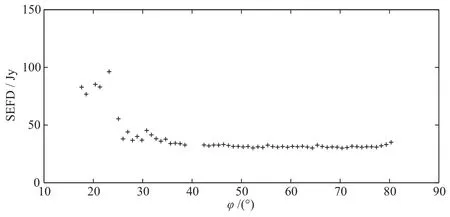
图15 3C123在1.488 GHz处带宽为2 MHz的L波段SEFD测试Fig.15 The measurement of L band SEFD of 3C123 at 1.488 GHz with 2 MHz bandwidth
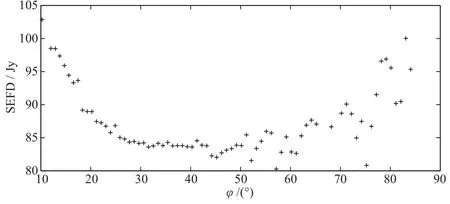
图16 3C123在2.2 GHz处带宽为20 MHz的S波段右旋SEFD测试Fig.16 The measurement of S band RCP SEFD of 3C123 at 2.2 GHz with 20 MHz bandwidth

图17 3C286在4.8 GHz处带宽为20 MHz的C波段左右旋SEFD测试Fig.17 The measurement of C band LCP&RCP SEFDs of 3C286 at 4.8 GHz with 20 MHz bandwidth
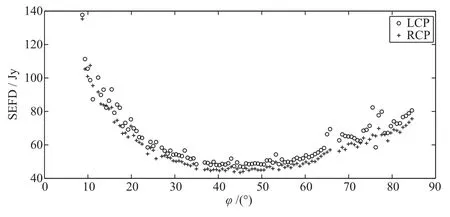
图18 3C286在8.4 GHz处带宽为20 MHz的X波段左右旋SEFD测试Fig.18 The measurement of X band LCP&RCP SEFDs of 3C286 at 8.4 GHz with 20 MHz bandwidth
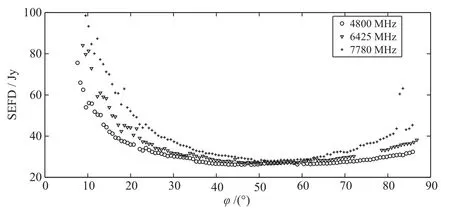
图19 C波段3个频点上右旋SEFD随俯仰变化Fig.19 The C band RCP SEFDs changing with elevation measured at 3 frequencies
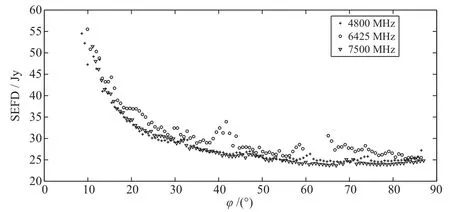
图20 副面随动时C波段3个频点上右旋SEFD随俯仰变化Fig.20The C band RCP SEFDs changing with elevation measured at 3 frequencies for a moving position of sub re fl ector
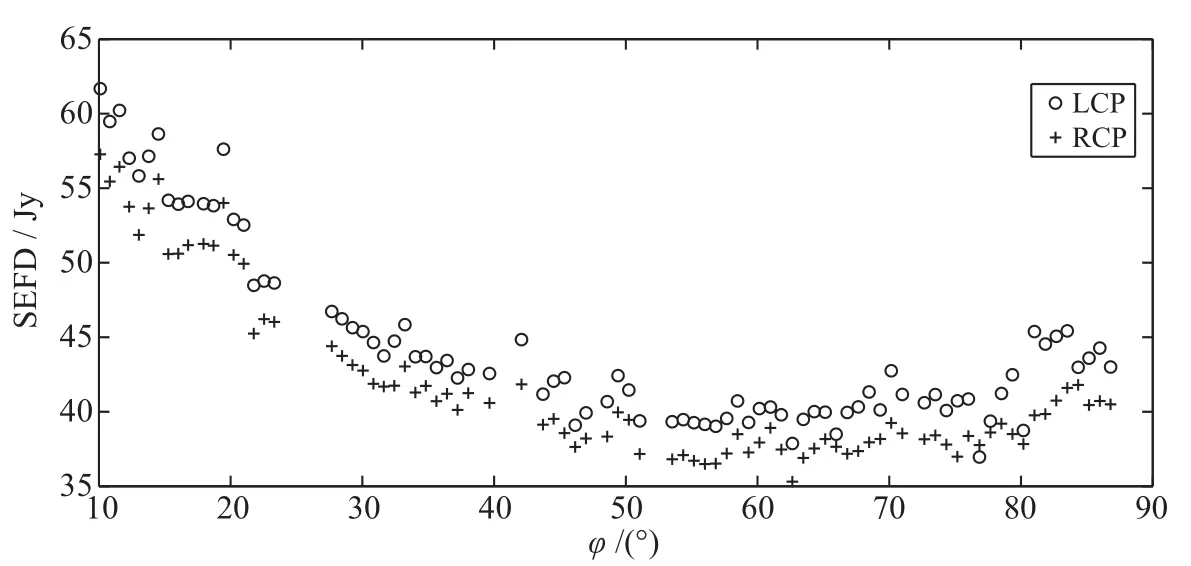
图21 副面随动时X波段左右旋SEFD随俯仰变化Fig.21 The X band LCP&RCP SEFDs changing with elevation for a moving position of sub re fl ector
5.2.3 系统噪声温度测量
图22给出了4个频段右旋系统噪声的测试情况(L波段为水平极化),X波段在高仰角上的系统噪声温度约31 K、C波段为20 K、S波段为55 K左右、L波段为25 K,S波段的系统噪声偏大主要是由于在该频段,TM65m天线所在电磁环境异常恶劣、天空噪声总体抬升导致.
图23给出了副面随动前后C波段7.5 GHz频率处的系统噪声曲线,两次测试天气都为多云天气,从中可以知道,副面随动对系统噪声影响不明显.图24为X波段8.4 GHz处副面随动前后系统噪声温度的测试情况,两次测量时天气差异较大,副面固定时观测为阴天,随动后观测时段为晴朗天气,可以看到两次测量有约2.5 K的系统偏差,这应当归因于大气条件的差异,但是左右旋之间的相对偏差依旧保持良好,相差3 K左右.由于系统噪声温度的测试与大气有较大关系,这里我们可以取同时测量的不同频率上的测量数据作比较,由于目前我们采用的数据采集终端最大带宽为500MHz,图25给出了连续500MHz带宽上,3个抽取频率点的系统噪声温度曲线,可以看到随着频率的上升,系统噪声温度也随着上升,并且系统噪声温度的抬升量与频率间隔基本呈线性比例(注意:图25中俯仰83°左右的测量点为测量异常点,此时天线扫描速度未设置良好导致,之后调整天线扫描速度到正常速度,此后84°∼86°为正常数据).
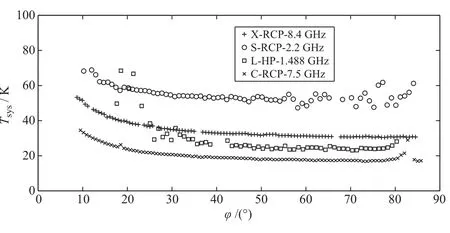
图22 4个波段系统噪声温度Fig.22 The system noise temperatures in 4 bands
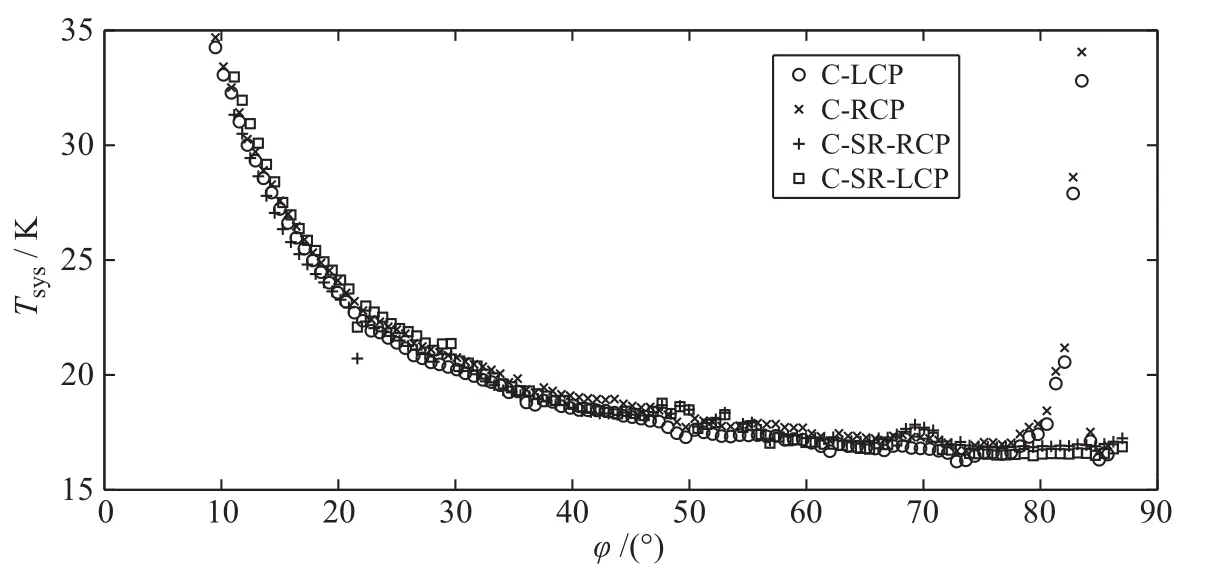
图23 C波段(7.5 GHz)副面随动前后系统噪声温度Fig.23 The C band(7.5 GHz)system noise temperature for fi xed and moving positions of sub re fl ector
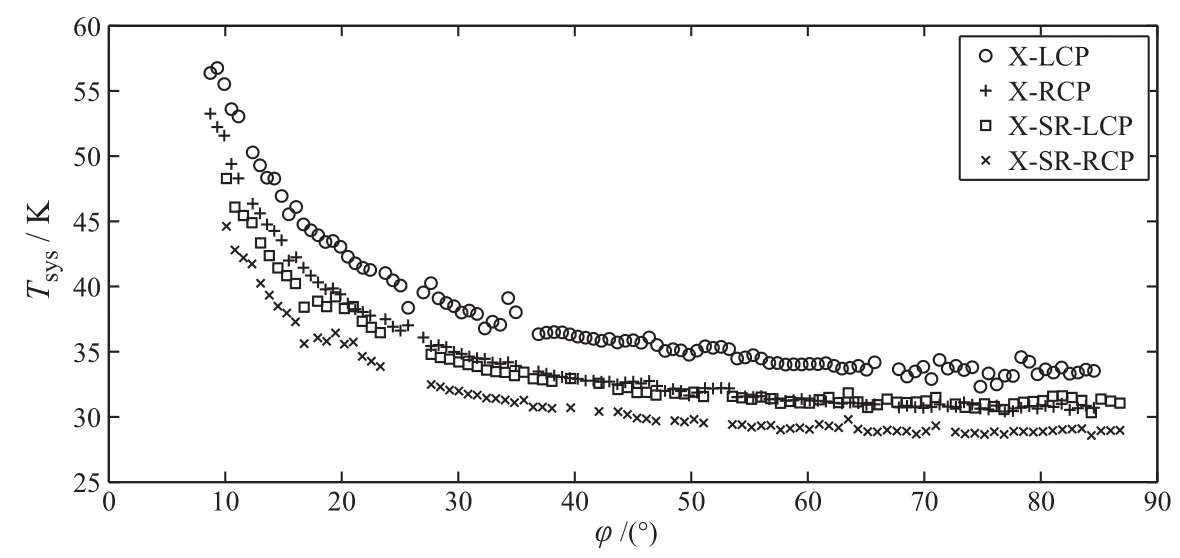
图24 X波段(8.4 GHz)副面随动前后系统噪声温度Fig.24 The C band(8.4 GHz)system noise temperature for fi xed and moving positions of sub re fl ector
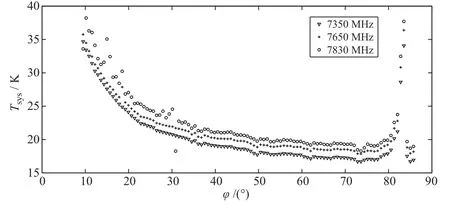
图25 C波段右旋同次测量3个频点上的系统噪声温度Fig.25 The C band RCP system noise temperature at 3 frequencies in the same measurement
6 总结
本文重点讨论了TM65m射电望远镜上4个低频接收系统的性能测试情况,对于副面随动的情况给出了C和X两个波段的测试结果.测试结果表明,在最佳仰角上L、S、C、X 4个波段的效率均可以达到60%以上,灵敏度SEFD分别为30 Jy、83 Jy、25 Jy、40 Jy左右,在副面随动模型启动后,C和X两个波段的效率在全部俯仰角上均可以达到60%以上,SEFD在高低俯仰角上约有2倍的改善;4个波段在最佳俯仰角上系统噪声温度分别约为26 K、57 K、20 K以及32 K,并且在C和X两个波段上副面随动模型的启动对系统噪声温度的影响不明显.
目前导致效率测量不确定度的关键因素还是噪声源定标有一定的误差,当前的定标误差约为2%,个别频率点上定标误差可能达到5%,但这已经比实验室定标误差提高了2倍以上.为了提高效率和系统噪声温度测量不确定度,下面3项将是值得尝试的工作:
(1)在测量过程中发现,随着天线俯仰角的变化,尤其在高低俯仰角时,方向图畸变明显,这导致了旁瓣能量的升高,主瓣能量的下降,最后表现出天线效率测量值的下降.因此需要建立方向图特征与俯仰角的关系[9];
(2)对噪声源进行良好的温度控制,以期改善噪声源的稳定度和定标偏差;
(3)面源的流量强度很大,可以有效抑制噪声,在短时间内积分就可以获得良好的信噪比,因此对测量十分有利,但是面源的波束修正因子误差比较大,从而导致的不确定度也增加.这可以通过扫描2维方向图,对整个方向图内的功率积分,并用积分后功率进行性能解算,从而避开面源的修正因子问题.
[1]Baars M,Genzel R,Pauliny K,et al.A&A,1997,61:99
[2]Klein M,Stelzried T.AJ,1976,81:1078
[3]Baars J W M.ITAP,1973,21:461
[4]Ulich B L,Haas R W.ApJS,1976,30:247
[5]王锦清,虞林峰,赵融冰,等.天文学报,2015,56:63
[6]钱志翰,李金岭.甚长基线干涉测量技术在深空探测中的应用.北京:中国科学技术出版社,2014:33
[7]Ott M,Witzel A,Quirrenbach A,et al.A&A,1994,284:331
[8]王锦清,虞林峰,赵融冰,等.中国科学G辑,2014,44:1232
[9]Smith P.ITAP,1966,14:6
Antenna Performance Measurements in L,S,C,and X Bands for TM65m Radio Telescope
WANG Jin-qing1,2ZHAO Rong-bing1,2YU Lin-feng1,2YIN Hai-ling3LAO Bao-qiang1,4WU Ya-jun1,2LI Bin1,2DONG Jian1,2JIANG Yong-bin1,2XIA Bo1,2ZUO Xiu-ting1,2GOU Wei1,2GUO Wen1,2WU Xiao-cong1,2LU Xue-jiang1,2LIU Qing-hui1,2FAN Qing-yuan1,2JIANG Dong-rong1,2QIAN Zhi-han1,2
(1 Shanghai Astronomical Observatory,Chinese Academy of Sciences,Shanghai 200030)
(2 Key Laboratory of Radio Astronomy,Chinese Academy of Sciences,Nanjing 210008)
(3 Shanghai XinZhuYuan Middle School,Shanghai 200122)
(4 Guilin University of Electronic Technology,Guilin 541004)
The measured results of the antenna efficiency,sensitivity,and system noise temperature for TM65m telescope are reported in this paper.The key parameters describing a radio astronomy receiving system are introduced fi rstly.Then the measurement methods are discussed,and the errors are assessed.Finally,the measurements of the antenna efficiency,sensitivity,and system temperature performances are given.The results show that the efficiency and SEFD(System Equivalent Flux Density)decrease dramatically at both low and high elevations when the position of the sub-re fl ector is fi xed.The antenna efficiency in C and X bands reaches more than 60% over the entire elevation range if a sub-re fl ector model is applied.The system noise temperatures are independent of the sub-re fl ector model.The sensitivity and system noise temperature of the C band has the best performance among the four bands.
atmospheric e ff ects,techniques:radar astronomy,cosmic background radiation
P111;
A
10.15940/j.cnki.0001-5245.2015.03.008
2014-09-24收到原稿,2014-11-28收到修改稿∗国家自然科学基金项目(11303076)资助
†jqwang@shao.ac.cn
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
航天返回与遥感(2022年2期)2022-05-12
今日农业(2021年19期)2022-01-12
空间科学学报(2020年1期)2021-01-14
雷达学报(2018年3期)2018-07-18
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
中国交通信息化(2017年10期)2017-06-06
电子制作(2017年8期)2017-06-05
电子制作(2016年1期)2016-11-07
