基于贝叶斯网络和多传感器的障碍物识别系统
2015-06-26 15:55张超李磊民
网络安全与数据管理 2015年19期
张超,李磊民
(1.西南科技大学信息工程学院,四川绵阳621010;2.西南科技大学国防科技学院,四川绵阳621010)
基于贝叶斯网络和多传感器的障碍物识别系统
张超1,李磊民2
(1.西南科技大学信息工程学院,四川绵阳621010;2.西南科技大学国防科技学院,四川绵阳621010)
针对无人车获得的障碍物信息的不确定性和不完整性以及贝叶斯分类器对不完整信息比较敏感等不足,选择了贝叶斯网络分类方案。该方案在构建贝叶斯网络模型时,将贝叶斯推理运用其中,提高了贝叶斯网络的识别率。该分类系统依托某研究所无人车项目,通过激光雷达和CCD传感器获取障碍物实时信息,为网络模型提供数据信息。
无人车;贝叶斯网络;障碍物;分类
0 引言
近年来,无人车技术发展迅速[1],无人车实际应用的一个又一个难题得到解决。无人车技术的关键是障碍物的检测与识别,这是无人车投入使用的基础与关键[2]。
为了准确地检测与识别这些障碍物,往往需要不同的传感器来获取车体周围的环境信息。不同的传感器返回的信息也不尽相同。
由于障碍物识别在无人车中的关键作用,使其成为一个重要的研究课题。在基于机器视觉的障碍物识别中,李宇[3]将单目视觉发展为双目视觉,克服了单目视觉的一些缺点,提高了识别率。朱晓芸[4]等为了提高识别率,采用基于神经网络的分类器,但是神经网络有一个缺点,就是识别收敛速度慢。王广君[5]等人采用激光雷达技术进行障碍物的检测与识别。沈志熙等[6]使用基于Boosting的方法识别障碍物。通过对比发现,单一的传感器无法获得让人满意的障碍物信息。为了提高识别率,采用分类器进行障碍物识别。
目前常见的分类器主要有基于决策树算法的分类器、基于贝叶斯算法的分类器[7-12]、基于支持向量机算法的分类器、基于Adaboost算法的分类器和基于神经网络算法的分类器等。
尽管贝叶斯分类器是一种非常实用的学习技术,但由于其假设条件在现实世界的学习任务中很少被满足,因而贝叶斯网络被提出。贝叶斯网络是为解决不确定性和不完整性问题而提出的一种新的基于统计理论方法的、采用简洁易懂的图解方式表达概率分布的方法。它是贝叶斯的扩展。贝叶斯网络的特性恰好满足了无人车障碍物数据信息的不确定性和不完整性,解决了因信息不完整带来的识别率低的问题。
1 障碍物信息预处理
本文采用激光雷达和CCD摄像机相结合来获得障碍物信息,克服了单一传感器信息单一化的不足。本文讨论的障碍物类型主要是人、汽车、摩托车(包括自行车)三类。但是马路上环境复杂多变,确定这些障碍物的分类的依据是激光雷达和机器视觉提供的信息。这些信息主要有以下几类:
(1)障碍物高度(height):可分为高h1(大于1.9 m),中h2(0.8~1.9 m),低h3(小于0.8 m);
(2)障碍物宽度(width):可以分为宽w1(大于1.5 m),中w2(0.6~1.5 m),低w3(低于0.6 m);
(3)障碍物厚度(thickness):厚t1(大于0.6 m);薄t2(小于0.6 m);
(4)障碍物速度(speed):普通障碍物为静止s1(0 m/s);人的速度一般为中等s2(10 m/s以下);车的速度一般为高s3(普通道路上10~30 m/s)。
由以上信息,结合实际生活,可以得出结论:不同的障碍物的行为特征和外形特征在某些因素上反应相对突出,另一些因素则比较模糊,或者说在某些因素达到某个值后对目标的反应比较突出。比如速度和位置,当速度在10 m/s以上时,基本上可以确定是车辆障碍物,人的速度不太可能达到,但不是绝对的。
2 贝叶斯网络的设计
贝叶斯网络(Bayesian Network,BN)是采用有向图来描述概率关系的理论,它适用于不确定性和概率性事物,应用于有条件地依赖多种控制因素的相关问题。在解决许多实际问题的过程中,需要从不完全的、不精确的或不确定的知识和信息中作出推理和推断,而BN正是一种概率推理技术,它使用概率论来处理各知识之间因条件相关性而产生的不确定性。贝叶斯网络的关键在于网络结构设计和参数的确定。
2.1 确定网络结构
一个贝叶斯网络有两个部分组成,一是网络结构G,二是网络参数θ,即:
B=<G,θ>
网络结构G是用一个有向无环图对变量进行编码,它的节点表示随机变量vi,弧表示变量之间的相互联系,节点变量则抽象成传感器返回的障碍物信息,本文中vi主要表示障碍物的长、宽、高、速度等信息。
网络参数是指为每一个变量指定的条件概率表(Conditional Probability Table,CPT)。CPT为每个变量的实例均指定了条件概率,即CPT表达了节点变量与其父节点之间的概率关系,没有任何父节点的节点的条件概率为其先验概率。
图1所示为障碍物分类的贝叶斯网络模型。
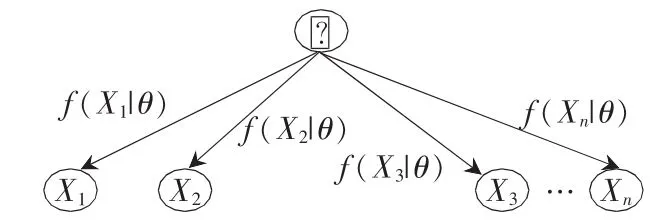
图1 障碍物分类贝叶斯网络模型
2.2 确定节点参数
当贝叶斯网络结构确定后,就应该确定已知结构中节点的参数。为了确定节点参数,通过贝叶斯统计从数据中学习来得到参数。基本步骤如下:
(1)f(θ)的选择
令θ为障碍物类型(人、车、其他障碍物),f(θ)为此类型的先验分布。由于障碍物数量多且随机,故假设先验为均匀分布。
(2)模型的选择
每个数据样本即传感器一次传回的障碍物信息用一个n维特征向量X={x1,x2,…xn}表示,分别描述对θ的n个属性的n个度量。f(x|θ)反映在给定障碍物类型的情况下x的可信度。f(x|θ)可以变形为式(1),称为似然函数,似然函数真正解释为给定参数下数据信息的概率。

(3)计算后验概率
通过选择好的模型和一定的传感器信息数据,就可以更新对X的信念。以此信念来计算后验概率f(θ|X1,…,Xn)。因此后验概率公式为:

其中,cn=∫Ln(θ)f(θ)dθ称为归一化常数。如果关心的是参数θ的不同取值之间的比较,则该常数可以被忽略。
或者,假定有m个类:θ1,θ2,…θm,给定一个未知的数据样本X(即没有判定的类),分类法将预测X属于具有最高后验概率(条件X下)的类。即朴素贝叶斯分类将未知的样本分配给类Ci,当且仅当:

这样,最大化P(θi|X)。其P(θi|X)最大的类θi称为最大后验假定。根据贝叶斯定理有:

由于P(X)是所有障碍物某特征的总概率,故对于所有类为同一概率,因此,只需要P(X|θi)P(θi)最大即可。
(4)修正先验概率
首先要得到点估计和区间估计。后验的均值是一个常用的点估计,这是一个L2损失下的贝叶斯规则。

为了得到贝叶斯区间估计,需找到a和b,使得:
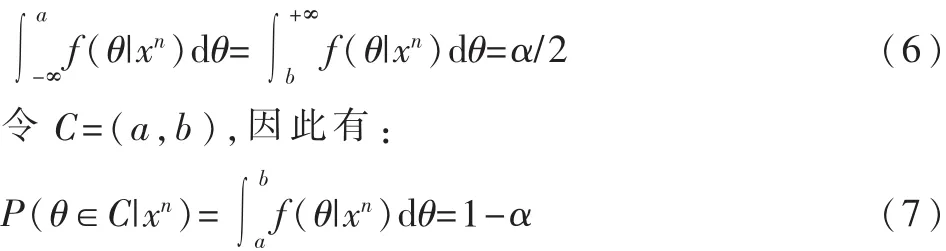
C即为1-α后验区间。
由此,可以根据C、θ¯n和分类结果对先验概率数据库进行修正和更新。图2所示即为一个典型的贝叶斯网络推理过程。
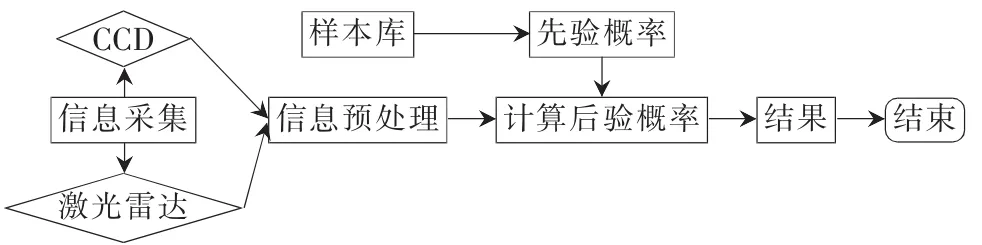
图2 一个典型的贝叶斯网络推理过程
3 实验与分析
每一次完整的数据信息都至少包括四个基本信息节点和两个辅助信息节点,如表1。这些信息都由车载CCD和激光雷达传感器在不同速度下采集。为了判断分类的正确率,通过采集的视频事先给出分类结果,将贝叶斯推理分类结果与事先给出的结果对比就可以计算出正确率。
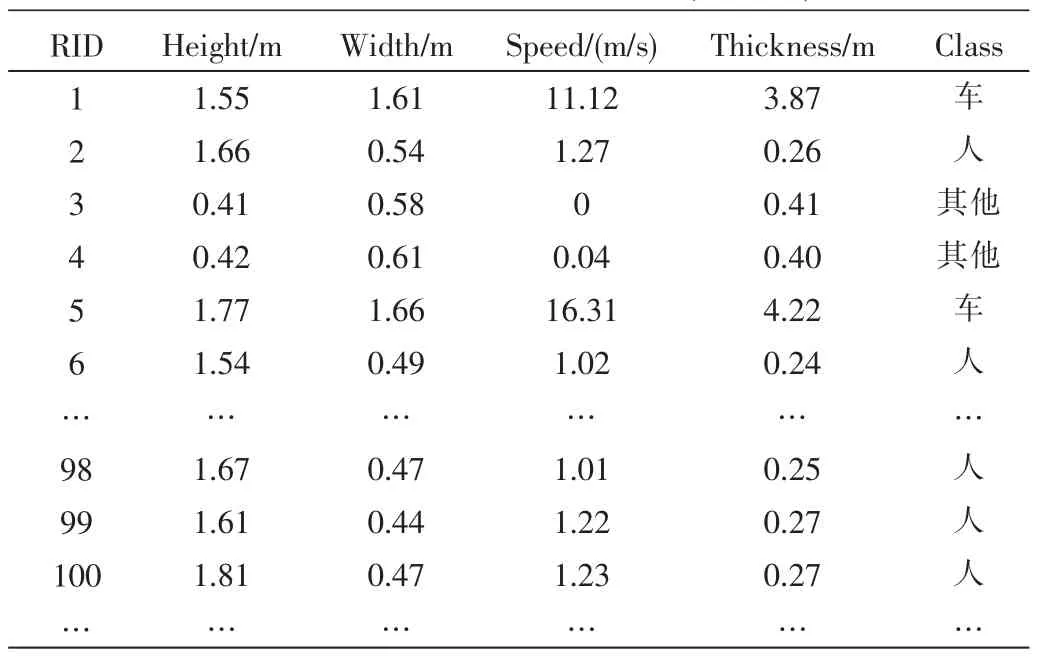
表1 障碍物基本信息(部分)
神经网络(BP)及支持向量机(SVM)是目前障碍物的分类中使用较多的两类分类算法,它们是机器算法中的基于信号处理的经典方法,其原理与贝叶斯网络不同。为了验证贝叶斯网络的性能,与神经网络及支持向量机进行对比(同样的训练样本)。
三种不同分类算法的识别率对比如图3,可以看出,贝叶斯网络的识别率相对于SVM和BP比较稳定,识别率也较高,因为贝叶斯网络是建立在随机概率之上的,且对障碍物信息的不完整性不敏感。SVM的识别率比较低,变化幅度也比较大,这与SVM的分类原理有关。SVM是基于知识库的,也就是如果训练的样本数量不足,或者样本面比较窄,就会严重影响分类识别。
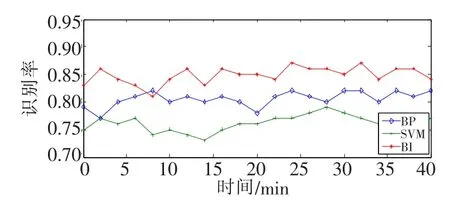
图3 不同分类器正确率对比
本系统的设计目的就是在行驶中检测感知环境,为无人车路径规划提供依据。但是在车辆行驶中产生的抖动会影响传感器采集的信息的准确度,特别是CCD摄像机。因此,为了进一步验证贝叶斯网络推理的性能,通过人工驾驶汽车进行不同速度、不间断地采集数据,进行比较,结果如图4所示。
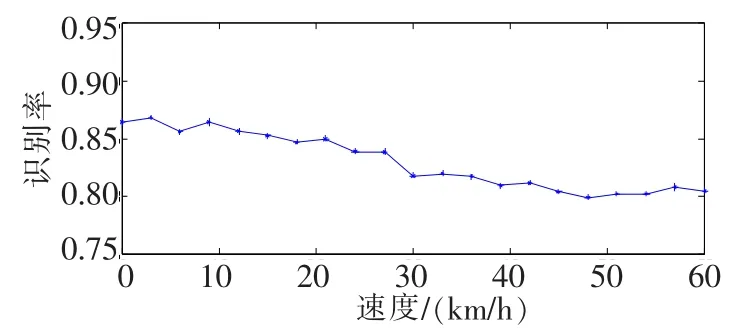
图4 不同速度下正确率对比
4 结束语
贝叶斯网络推理在障碍物分类上有很大的优势,特别是在障碍物信息存在不确定性和不完整性的时候。本文提出的贝叶斯网络分类方法把传感器返回的数据信息充分利用起来,有助于无人车准确地获得环境信息,特别是障碍物的信息。本文介绍了用于无人车障碍物检测和分类的贝叶斯网络的建立和确定节点参数的过程。最后,采用支持向量机方法和神经网络对贝叶斯网络分类过程进行对比实验,验证了所提出方法的有效性和正确性。
[1]江意.无人车来到伦敦还考驾照?!无人车来了!![J].世界博览,2015(9):62-63.
[2]刘霞.无人驾驶汽车的驾驶能力首次超过赛车专家[N].科技日报,2015-02-16(2).
[3]李宇.基于双目视觉的障碍物识别研究[D].武汉:武汉理工大学,2007.
[4]朱晓芸,杨建刚,何志钧.神经网络的多传感器数据融合基于新算法在障碍物识别中的应用[J].机器人,1997(3):7-13.
[5]王广君,田金文,柳健.激光成像雷达前视成像仿真及障碍物识别方法研究[J].红外与激光工程,2001,30(6):462-465.
[6]沈志熙,黄席樾,杨镇宇,等.基于Boosting的智能车辆多类障碍物识别[J].计算机工程,2009,35(14):241-242,246.
[7]史建国,高晓光,李相民.连续动态贝叶斯网络实现多传感器融合跟踪[J].火力与指挥控制,2005,30(8):16-19.
[8]Cai Zhiqiang,Si Shubin,Sun Shudong,et al.Learning Bayesiannetworkstructurewithimmunealgorithm[J]. Journal of Systems Engineering and Electronics,2015,26(2):282-291.
[9]ANGEL L,VLADIMIR I,EDUARDO M.Dynamic obstacle avoidance using Bayesian occupancy filter and approximate inference[J].SENSORS,2013,13(3):2929-2944.
[10]Li Yanying,Yang Youlong,Zhu Xiaofeng,et al.Towards fast and efficient algorithm for learning Bayesian network[J]. Wuhan University Journal of Natural Sciences,2015,20(3):214-220.
[11]Zhang Zhengdao,Zhu Jinlin,Pan Feng.Fault detection and diagnosis for data incomplete industrial systems with new Bayesian network approach[J].Journal of Systems Engineering and Electronics,2013,24(3):500-511.
[12]徐小力,刘秀丽,蒋章雷,等.基于主观贝叶斯推理的多传感器分布式故障检测融合方法[J].机械工程学报,2015(7):91-98.
Obstacle recognition system based on Bayesian network and multi-sensor
Zhang Chao1,Li Leimin2
(1.School of Information Engineering,Southwest University of Science and Technology,Mianyang 621010,China;2.School of National Defense Science and Technology,Southwest University of Science and Technology,Mianyang 621010,China)
Because of the obstacle information′s uncertainty,incompleteness and the short of Bayesian classifier that it is sensitive for incomplete information,the paper selects a Bayesian network classification scheme.When building the Bayesian network model,this program using Bayesian inference which can improve the adaptability of the Bayesian network.The classification system relies on a research institute unmanned vehicle project.Real-time information is obtained via laser radar and CCD sensor that provides data to the network model.
unmanned vehicle;Bayesian network;obstacle;classification
TP319
A
1674-7720(2015)19-0080-03
2015-06-09)
张超(1988-),男,硕士研究生,主要研究方向:图像处理。
张超,李磊民.基于贝叶斯网络和多传感器的障碍物识别系统[J].微型机与应用,2015,34(19):80-82,85.
猜你喜欢
法律方法(2021年4期)2021-03-16
动漫界·幼教365(中班)(2020年3期)2020-04-20
计算机工程(2020年3期)2020-03-19
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
中国听力语言康复科学杂志(2019年3期)2019-06-24
中国交通信息化(2018年3期)2018-06-13
中国交通信息化(2016年2期)2016-06-06
铁道通信信号(2016年6期)2016-06-01
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27