
并联机器人在机械工程实验教学中的应用
2015-06-23 12:20:28安昭辉侯冬冬张丁龙
实验技术与管理 2015年3期
沈 刚,安昭辉,李 翔,侯冬冬,张丁龙
(中国矿业大学机电工程学院,江苏徐州 222116)
并联机器人在机械工程实验教学中的应用
沈 刚,安昭辉,李 翔,侯冬冬,张丁龙
(中国矿业大学机电工程学院,江苏徐州 222116)
在控制工程基础、机器人技术及单片机等课程教学中,充分利用六自由度并联机器人平台进行实验教学,可解决机械工程实验教学中先进机器人技术教学难的问题。结合控制工程基础、机器人技术及单片机等课程的具体教学实例,对六自由度并联机器人在机械工程实验教学中的应用进行了探索与实践。实验结果证明,该方法提高了学生对控制工程基础、机器人技术及单片机等课程的理解,培养了学生动手能力,实验教学效果良好,为控制工程基础、机器人技术以及单片机等课程的实验教学提供了一种新的方法。
实验教学;六自由度并联机器人;控制工程基础;机器人技术;单片机
高校机械工程自动化专业的控制工程基础、机器人技术以及单片机等课程作为工业自动化产业人才培养的重要基础课程,主要讲授自动化基本原理及应用[1-2]。这些课程实践性很强,理论知识的实验验证环节非常重要,但目前国内高校在机械工程的实验教学中主要还沿袭传统的教学方法,理论教学强于实验教学,学生难以充分应用所学的课程解决实际工程问题[3-4]。
六自由度并联机器人具有刚度大、承载能力强、结构比较简单、精度高、没有误差累积和易于控制等优点,广泛应用于国防和民用先进制造领域[5-6],如美国研制基于并联驱动的“大狗”平台[7-8]和基于Delta并联机器人的3D打印技术[9-10],而先进机器人技术和3D打印技术在2013年麦肯锡全球研究所列出的改变世界经济的12项颠覆性技术中分别排名第5和第9。为提高高校机械工程课程的教学质量,锻炼学生对控制工程基础、机器人技术以及单片机等课程学习中的实践应用能力,加深对这些基础课程概念和设计的理解,开发基于先进机器人技术的机械工程实验教学非常必要。
1 六自由度并联机器人工作原理及组成
六自由度并联机器人由机械部分和控制系统组成。机械部分由动平台、静平台、执行器及连接部分等构成;控制系统的上位机设定有六维坐标参考信号,控制器经过反解矩阵运算得出6个执行器应给定的长度,然后通过执行器的驱动程序控制6个执行器的位移,从而使六维坐标在动平台上得到了复现。图1为六自由度并联机器人基本原理。

图1 六自由度并联机器人基本原理
2 六自由度并联机器人系统制作
为了提高学生的实践动手能力,六自由度并联机器人采用模块化的机构组装方式,控制系统采用基于STM32F407ZET6的嵌入式控制器,利用LabVIEW编写了上位机调试界面,并通过以太网进行数据传输及命令发送,最终实现对6个步进电机丝杆滑台的控制。
搭建的六自由度并联机器人所需设备及材料见表1,外购实物平台如图2所示。
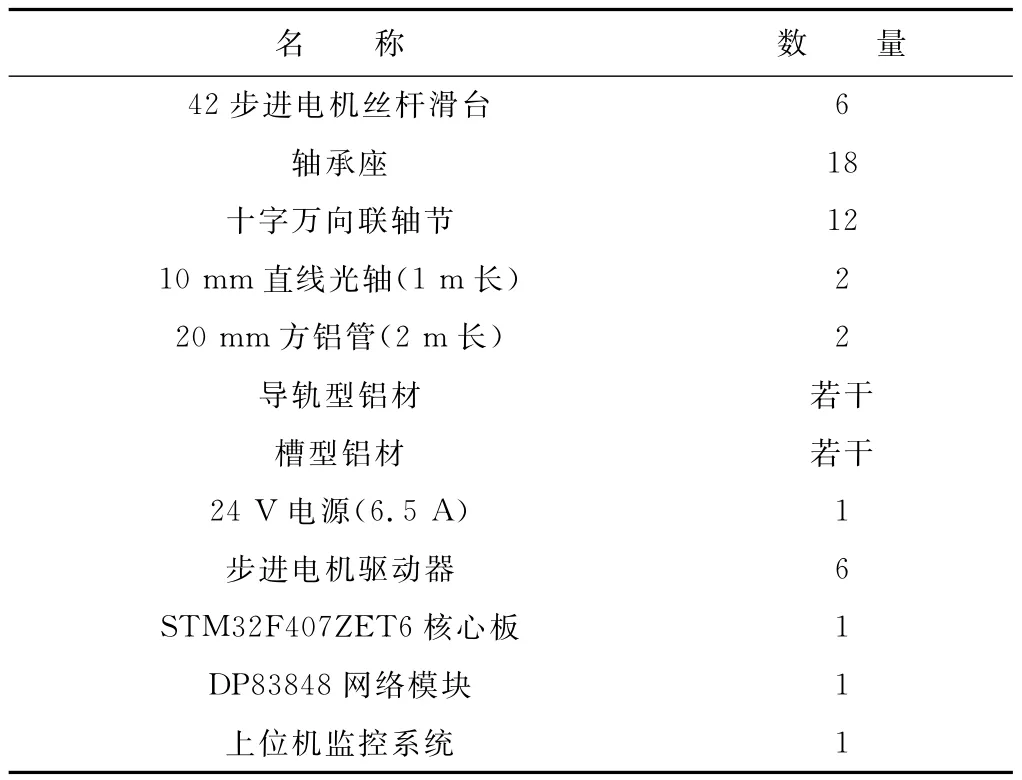
表1 设备及材料

图2 六自由度并联机器人实物图
3 六自由度并联机器人控制系统
主控制芯片采用了基于Cortex M4内核的STM32F407高性能微控制器,其主频高达168MHz,且集成了单周期DSP指令和浮点运算单元(floating point unit,FPU),能够满足六自由度并联机器人反解矩阵的运算,并进行实时控制[11]。
3.1 六自由度并联机器人反解算法
图3为六自由度并联机器人六维坐标α、β、γ、X、Y、Z均为0时静平台与动平台各个铰接点的初始坐标。其中α、β、γ(欧拉角)分别为上平台与x轴、y轴和z轴的夹角,X、Y、Z分别为沿上平台中心点的x方向、y方向和z方向的平移长度。给定一个六维参考坐标后,代入公式(1),计算得出动平台(上平台)各个铰接点的坐标(Xai,Yai,Zai),再根据公式(2)求静坐标与动坐标的直接距离,继而求得6个轴的长度Li[12]。
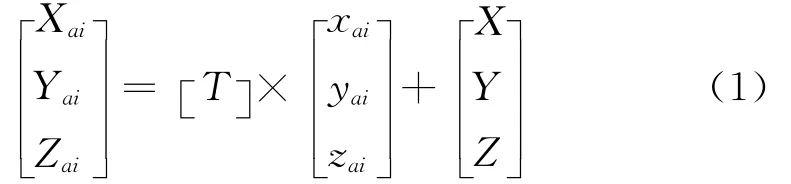
其中姿态旋转矩阵:

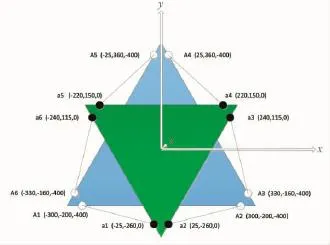
图3 六自由度并联机器人坐标系定义
3.2 人机交互驱动程序
六自由度并联机器人人机交互采用上位机加下位机的控制方式。上位机为普通计算机,开发了六自由度并联机器人的LabVIEW监控程序系统,负责接收下位机通过以太网UDP模式发送过来的当前设定位置、6个缸位移等数据,同时可以发送命令到下位机进行实时控制[13]。下位机为STM32F407主控制器,软件部分主循环进行以太网的轮询处理,而反解矩阵运算、以太网数据发送与接收、步进电机驱动程序、运动模式判定及执行均通过中断程序进行处理。
程序的总流程图如图4所示。首先对各个IO端口、以太网、定时器等进行初始化,然后进入主循环的以太网轮询处理程序,下位机和上位机开始通过以太网进行数据通信。当上位机发出运动模式命令时,1 ms中断的定时器1自动计算运动模式的六维坐标并进行设定。同时1ms中断的定时器2实时反解出6个缸的长度,定时器3通过发送脉冲和方向信号对步进电机丝杆滑台实现稳定的位置控制,最终实现运动模式的复现。

图4 六自由度并联机器人控制系统流程图
3.3 步进电机驱动程序
步进电机驱动器依靠一个脉冲信号和一个方向信号进行控制,步进电机驱动程序通过定时器中断调用。当定时器产生中断时,将给定的位置与当前位置进行比较,通过偏差的正负确定电机的正反方向,同时每发出一个脉冲,当前位置根据方向自加1或自减1。程序流程如图5所示。
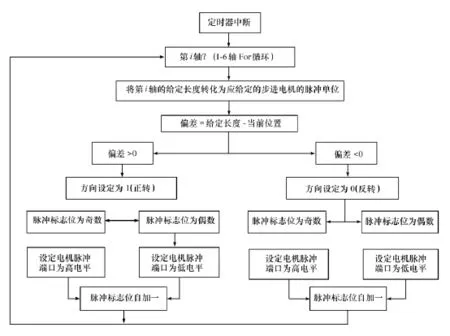
图5 步进电机驱动程序流程图
4 六自由度摇摆台运行测试
图6是六自由度并联机器人在x-y平面绕原点作半径为10mm的圆周运动和摇摆运动的实验结果,由下位机实时反馈到上位机LabVIEW界面的6个缸的长度。从实验结果可以看出:利用步进电机驱动和嵌入式控制器可以实现六自由度并联机器人较高的跟踪精度,验证了控制工程基础、机器人技术及单片机等课程在实践中的应用。

图6 六自由度并联机器人实验结果
5 结束语
本文所述基于步进电机驱动和嵌入式控制器的微型六自由度并联机器人的制作过程表明:该微型机器人费用较低、技术较先进,适合于本科学生自主制作。通过该实验项目,可以提高学生实际动手能力和分析问题的能力,同时将控制工程、机器人技术以及单片机等课程理论学习与实践紧密结合,为实验教学提供了一种新的教学方法。
(References)
[1]尚锐,王晓明,宛剑业.控制工程基础课程的实验方法研究[J].辽宁工业大学学报:社会科学版,2008,10(3):106-108.
[2]蒙艳玫,黄炳琼,严巳杰,等.机械工程控制基础课程的实验研究[J].广西大学学报:自然科学版,2006(增刊1):43-45.
[3]西格德·斯科格斯特德,伊恩·波斯尔思韦特.多变量反馈控制:分析与设计[M].韩崇昭,张爱民,刘晓风,等译.西安:西安交通大学出版社,2011.
[4]董景新,赵长德,郭美凤,等.控制工程基础[M].3版.北京:清华大学出版社,2009.
[5]吴乐彬.基于电液伺服并联六自由度机构的广义负载模拟理论和实验研究[D].杭州:浙江大学,2010.
[6]黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[7]美国研制成功“大狗”四足机器人[J].流体传动与控制,2009(3):56.
[8]新型大狗机器人“阿尔法狗”[J].机械工程师,2012(10):17.
[9]史丽红.基于Pro/E和ADAMS软件的少自由度并联机器人运动学和动力学分析[D].邯郸:河北工程大学,2010.
[10]黄海忠.DELTA并联机器人结构参数优化与运动控制研究[D].哈尔滨:哈尔滨工业大学,2013.
[11]Yiu J.ARM Cortex-M3权威指南[M].宋岩,译.北京:北京航空航天大学出版社,2009.
[12]孔宪文,黄真.3-RPS控制位置用并联机器人机构的位置反解[J].机械科学与技术,1999(3):84-86.
[13]王力.基于LabVIEW的高速数据采集系统的软硬件设计[D].南京:南京理工大学,2013.
·写作小常识·
论文中的斜体
论文中,下列场合的字母用斜体;
1.除pH外的物理量的符号(不论在文字中、还是图中、还是在表中或作为脚标);
2.脚标字母表示变动数时,或脚标字母表示坐标轴时;
3.表示变量的字母,如:x、y;
4.一般函数符号,如f(x);
5.表示几何中点、线、面、体、弧的字母;
6.表示坐标的字母,如:球坐标r、θ;
7.矢量、张量和矩阵的符号用黑斜体;
8.化学中表示旋光性、分子构型、构象、取代基位置等的符号。
《实验技术与管理》编辑部 编录
Application of parallel robot in experimental teaching of mechanical engineering
Shen Gang,An Zhaohui,Li Xiang,Hou Dongdong,Zhang Dinglong
(Mechanical and Electrical Engineering Institute,China University of Mining and Technology,Xuzhou 222116,China)
In the teaching process of Control Engineering,Robotics and SCM courses,the method of experimental teaching by making full use of six degrees of freedom parallel robot platform can solve the difficult problem effectively,which discusses the application of advanced robot technology in the experimental teaching of mechanical engineering.Based on the specific combination of teaching examples of Control Engineering,Robotics and SCM courses,some researches on the application of six degrees of freedom parallel robot in the foundation of the experimental teaching in Mechanical Engineering are made.Mass data coming out of the explorations and practices show that this method can remarkably improve the students’understanding of the basic theory of Control Engineering,Robotics and SCM courses,also training students ability to inspire a passion for learning basis theoretical effectively.A new approach has been found for the experimental teaching of Control Engineering,Robotics and SCM courses.
experimental teaching;six degrees of freedom parallel robot;control engineering foundation;robotics;SCM
TP242
A
1002-4956(2015)3-0179-04
2014-08-21 修改日期:2014-10-22
沈刚(1982—),男,安徽阜阳,工学博士,副教授,博士生导师,研究领域为电液伺服控制系统、并联机器人及工业机器人、协调加载系统
安昭辉(1992—),男,河南周口,硕士研究生,主要研究方向为嵌入式控制、并联机器人和电液伺服控制系统.
E-mail:zhaohui4849@126.com
猜你喜欢
水泥技术(2024年1期)2024-02-01 12:38:46
水泥技术(2023年4期)2023-09-07 08:52:14
机械工程与自动化(2022年5期)2022-10-28 09:57:38
中国机械工程(2022年19期)2022-10-18 12:31:38
中国机械工程(2022年18期)2022-10-08 03:28:24
机械工程与自动化(2022年4期)2022-08-23 15:08:54
装备制造技术(2020年1期)2020-12-25 05:18:20
建材发展导向(2019年11期)2019-08-24 06:35:44
电子制作(2017年24期)2017-02-02 07:14:44
电源技术(2015年7期)2015-08-22 08:48:48
