
健康体检机器人应用软件开发与实现
2015-06-23 12:20:28陈容红郑发跃
实验技术与管理 2015年3期
陈容红,郑发跃
(北京电子科技职业学院自动化工程学院,北京 100176)
健康体检机器人应用软件开发与实现
陈容红,郑发跃
(北京电子科技职业学院自动化工程学院,北京 100176)
介绍了用ARM单片机NUC140设计并实现的健康体检机器人控制系统,给出了设计流程和实验所得数据。健康体检机器人能够对身高、体重、血压、血糖、心电图、运动能耗、血氧饱和度等人体生物医学信号进行准确测量和记录,为健康体检机器人的进一步研究打下了基础。
健康体检机器人;应用软件;软件开发
医用机器人是机器人技术、计算机网络控制技术、数字图像处理技术、虚拟现实技术等的结合,可以辅助外科手术、康复医疗、健康体检和医院服务等功能。从20世纪90年代起,国际先进机器人计划(IARP)已召开过多届医用机器人研讨会。医用机器人技术是一个新兴的、多学科交叉的研究领域,对它的研究不仅能促进传统医疗技术的变革,而且也会对这些相关技术的发展产生积极的推动作用,具有重要的临床意义[1]。
健康体检机器人的主要功能是运用电子学技术来检测、放大、处理、显示、记录人体各生物医学信号,如身高、体重、血压、血糖、心电图、运动能耗、血氧饱和度等。本文介绍以32位内嵌式ARM单片机NuMicro NUC140为控制核心研制的健康体检机器人,主要讨论机器人控制系统以及软件的设计。
1 机器人控制系统设计
健康体检机器人由ARM主控板、身份识别模块、身高测量模块、体重测量模块、心电图测量模块、血氧浓度测量模块、能耗测量模块等组成[2-3]。以ARM单片机NuMicro NUC140设计的主控制板是控制核心,控制系统结构如图1所示。
RFID模块用于身份识别,由RFID电子标签和RFID读卡器两部分组成。RFID电子标签就是体检人员的ID卡,内置集成电路智能卡芯片和天线。RFID读卡器用来实现对RFID电子标签的数据读写和存储,由控制单元、通信智能模块和天线组成[4-6]。
身高模块的主要部分是超声波传感器,它包含超声波的产生和接收装置,用来进行身高测量和显示。
体重模块利用力传感器完成。
心电图模块用来进行心电图的测量,通过对心肌收缩时释放的生物电信号进行采集、处理和显示。
血氧饱和度是指人体血液中氧合血红蛋白占全血的百分数。该模块将传感器夹在手指尖部,指盖侧为发光器件,指肚侧为接收器件,利用氧合血红蛋白和非氧合血红蛋白对不同波长入射光有不同的吸收率的特性,把透过血液的光变化转换为电信号,再通过数据处理后进行数值显示。
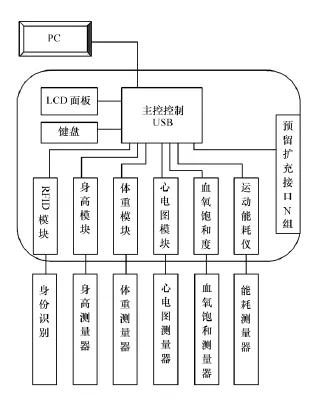
图1 控制系统结构框图
运动能耗模块采用三轴加速度技术监测人体运动能量消耗。
2 系统流程设计
系统软件开始运行时,首先要判断健康体检装置是否存在,然后进行系统连接,接着读取体检人员的ID卡,进行身份识别。身份识别程序流程见图2。
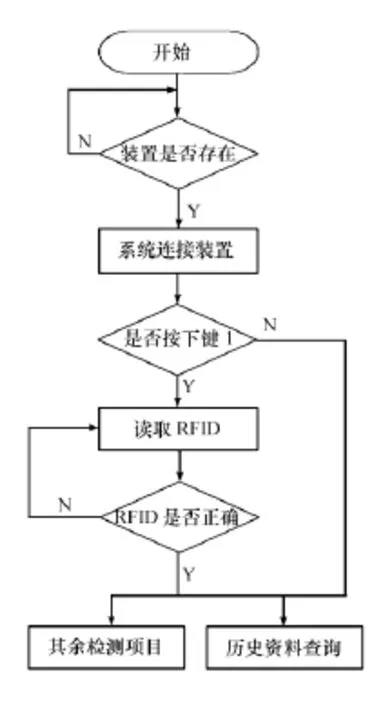
图2 身份识别程序流程图
健康体检机器人对体检人进行身份识别后,进入其历史资料的查询,并显示出该体检人在健康体检机器人中存储过的历史资料。历史资料查询程序流程图如图3所示。
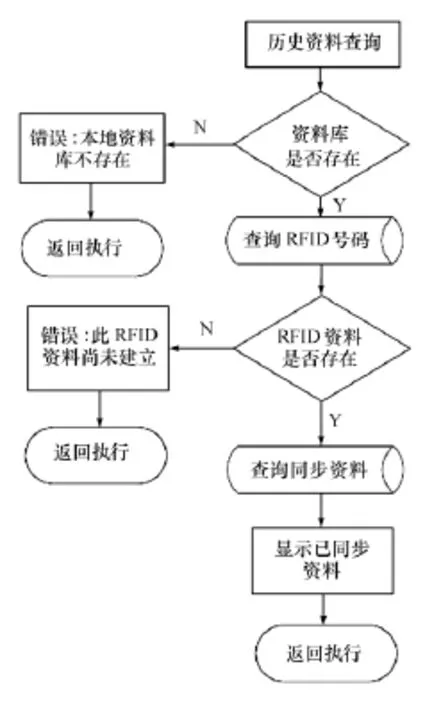
图3 历史资料查询程序流程图
健康体检机器人进行当前体检检测,如测量身高、体重、测心电图、测血氧量和运动能耗等,体检流程如图4所示。
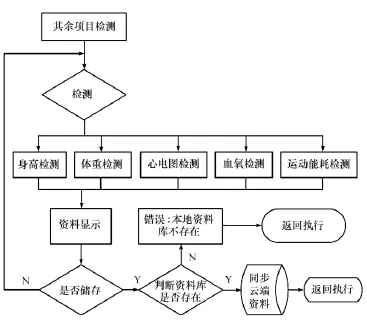
图4 体检程序流程图
体重检测模块工作流程如下:(1)开启外部CLOCK信号;(2)判断装置是否存在,如果存在,则开启VLDO端口;(3)测量体重并显示结果。体重测量模块工作流程如图5所示。
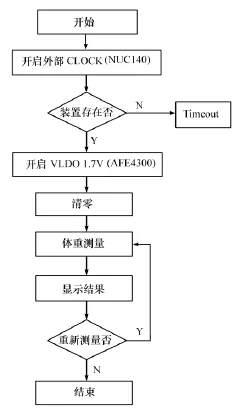
图5 体重测量模块程序流程图
健康体检机器人部分模块实物如图6—图9所示。
图6 ARM主控板

图7 RFID身份识别模块

图8 体重测量模块

图9 心电图模块
3 结束语
本课题对健康体检机器人进行了开发,用ARM单片机NuMicro NUC140设计并实现了健康体检机器人控制系统,可实现对人体生物医学信号进行测量、放大、处理、显示、记录等。
该机器人具有结构巧妙、易于加工制造的特点;控制系统采用ARM单片机,成本低,有利于产品化。为健康体检机器人的进一步研究打下了基础。
(References)
[1]张红霞.医用机器人的研究与发展[J].电子世界,2013(2):72-73.
[2]颜庆,张立勋,杨勇,等.下肢康复训练机器人单片机控制系统设计[J].应用科技,2004(11):1-3.
[3]张立勋,颜庆,杨勇,等.下肢康复训练机器人AVR单片机控制系统[J].机械与电子,2004(10):52-55.
[4]黄俊祥.基于MFRC522的RFID读卡器模块设计[J].微型机与应用,2010,29(22):16-18.
[5]杜丰,韩博,杨洁,等.基于SQL Server Mobile与RFID的身份认证设计与实现[J].实验技术与管理,2011,28(5):260-261.
[6]黄敦华,李勇,陈容红.医疗服务机器人应用与发展研究[J].机电产品开发与创新,2014,27(3):6-8.
Development and realization of application software of healthy physical examination robot
Chen Ronghong,Zheng Fayue
(College of Automation Engineering,Beijing Polytechnic,Beijing 100176,China)
The control system and the software design are introduced in detail with ARM monolithic integrated circuit NUC140VE3CN.The experimental prototype picture and the experimental obtained data are given.The prototype has basically realized the accurate survey of the human body height,the body weight,the blood pressure,the blood sugar,the electrocardiogram,the movement energy consumption,and the blood oxygen degree of saturation,which has laid the foundation for researching the healthy physical examination robot further.
healthy physical examination robot;application software;development of software
TP242.3
A
1002-4956(2015)3-0161-03
2014-09-14
北京市“科研基地—机电一体化系统控制工程科技创新平台二期—健康体检机器人系统研制项目”(PXM2010_014306_109864)资助
陈容红(1979—),女,湖北京山,硕士,讲师,主要从事工业网络技术、机器人技术、模式识别的教学与研究工作.
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22 00:50:34
心电与循环(2021年3期)2021-06-03 07:49:40
时代英语·高二(2017年4期)2017-08-11 11:55:11
河南科技(2016年8期)2016-09-03 08:08:22
河南科技(2016年6期)2016-08-13 08:18:29
现代电生理学杂志(2016年3期)2016-07-10 12:10:32
公民与法治(2016年22期)2016-05-17 04:20:31
小猕猴智力画刊(2015年4期)2015-04-28 08:29:07
浙江共产党员(2014年12期)2014-07-10 03:30:06
今日教育(2014年1期)2014-04-16 08:55:32
