
LabVIEW小波变换在轮轨力应变信号处理中的应用*
2015-06-21 10:50:48赖建飞雷晓燕刘庆杰
城市轨道交通研究 2015年2期
赖建飞 雷晓燕 刘庆杰
(华东交通大学铁路环境振动与噪声教育部工程研究中心,330013,南昌∥第一作者,硕士研究生)
脱轨系数和轮重减载率[1]等是评价列车行车安全的指标。这些指标是基于轮轨力而得来的,因此在对这些指标进行计算时,首先应得到轮轨力及其相关特征。
轮轨力应变波形图是记录列车经过钢轨时车轮对钢轨作用产生应变的时间分布图。对轮轨力应变波形图分析,可以得到轮轨力应变大小及其波形特征等。铁路轨道轮轨力应变的现场测试方法一般为轨腰压缩法或剪应力法[2]。这两种测试方法需要在钢轨的待测点上贴应变片,列车经过待测点时,应变测试仪采集应变片的应变值,再通过应变与轮轨力的对应关系而求得轮轨力。在数据采集的过程中,周围环境和测试仪自身的原因都会对测试数据产生影响。在采集到的信号当中,不仅仅包含列车经过钢轨时产生振动的应变值,还包括比如外界环境干扰、基准漂移干扰和电源线干扰等因素作用于应变片而产生的干扰值。若要对信号进行准确的分析或提取信号特征,就必须对信号进行处理。
使用LabVIEW和相关工具箱,如高级信号处理工具包和数字滤波器设计工具包等,研究人员可以对轮轨力应变信号进行处理,包括消除基准漂移、消除宽带噪声、提取信号特征等。这些方法在心电信号处理[3]和含水率监测系统的信号处理[4]等方面取得了很好的效果。本文将以在铁路宁启(南京—启东)线上若干测点所测得轮轨力应变信号为处理对象,对这几种信号处理方法进行讨论。
1 LabVIEW小波算法分析
在LabVIEW环境中的小波算法为Mallat算法[5],即离散小波变换的分解和重构算法。
1.1 算法分解
Mallat算法可以在不同尺度下把已知信号分解成多级近似信号和细节信号,如图1所示 。

图1 分解算法
在图1b)中,a0表示原信号;am(m=1,2,3,…,M)表示分解后得到的近似信号;dm(m=1,2,3,…,M)表示分解后得到的细节信号。其分解过程可表示如下[6]:
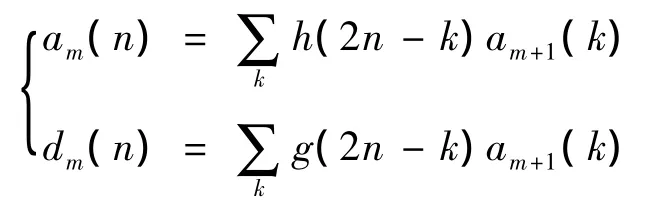
以上两式的物理意义为:am(n)经过冲击响应为h(n)的数字滤波器后,抽取偶数样本便得到am+1(n);am(n)经过冲击响应为g(n)的数字滤波器后,抽取偶数样本便得到dm+1(n)。其中,h(n)和g(n)分别是低通滤波器H和高通滤波器G的冲击序列,两者关系为[6]:
g(k)=(- 1)1-kh(1 - k),h(k)=h(- k)
1.2 算法重构
分解算法的逆过程是重构算法,是利用最终近似信号和细节信号恢复成原始信号,如图2所示[6-7]。
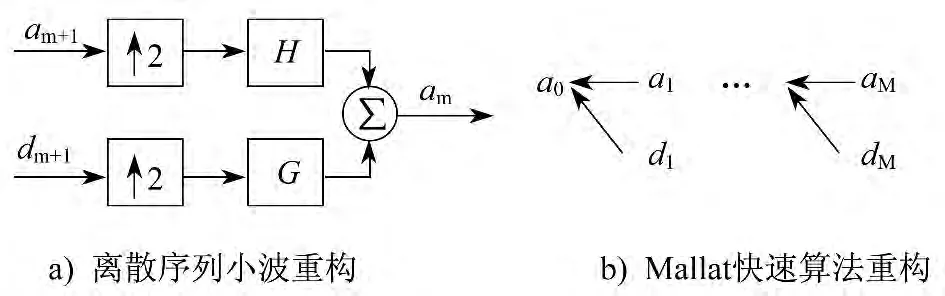
图2 重构算法
其中重构算法的公式为[6]:
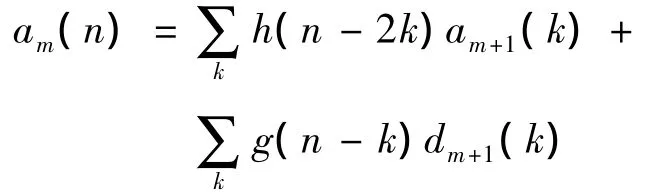
对于含噪信号,利用LabVIEW小波变换处理数据可以很大程度上消除干扰,包括消除基准漂移和宽带噪声。
2 基准漂移的消除
在对信号进行采集时,外界或采集仪内部因素等的干扰会产生噪声信号,从而导致信号的失真。这些噪声在很大程度上会影响所采集目的信号的准确性。这些噪声当中主要包含基准漂移和宽带噪声等。在LabVIEW中消除基准漂移有数字滤波和小波变换两种方法。
2.1 数字滤波方法
滤波技术在信号的获取、传输和处理当中发挥着重要作用,滤波器[8]是一种选频装置,即允许信号中的特定频率成分通过而衰减到其他频率成分。因为这种特性,滤波器可用于滤除干扰噪声。LabVIEW数字滤波器设计工具包提供了Classical Filter Design Express VI。此VI是多态VI,提供了方便的交互式配置界面。基于待处理信号的特征,利用此VI设计了Kaiser窗高通滤波器用以消除基准漂移。程序框图如图3。
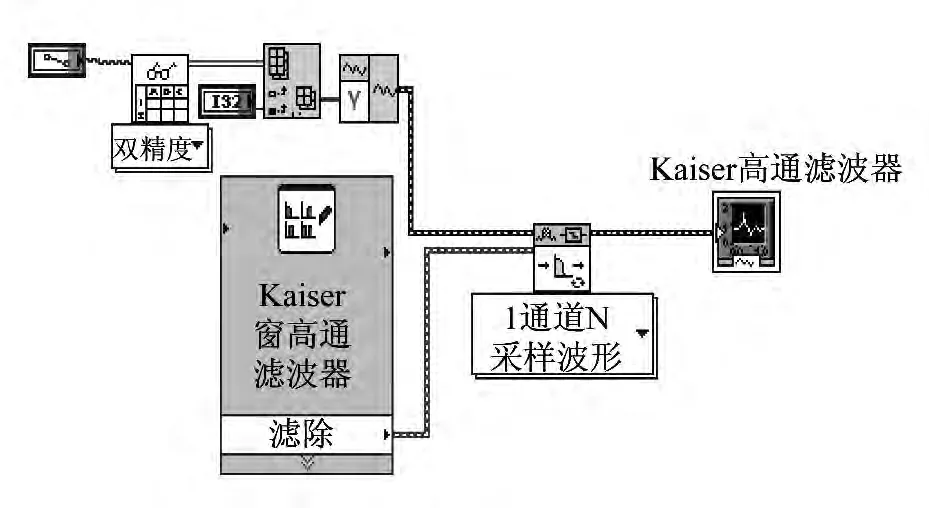
图3 基于Kaiser窗高通滤波器信号处理的程序框图
2.2 小波变换方法
除去数字滤波方法,LabVIEW高级信号处理工具包提供了WA Detrend VI。此VI是基于小波变换的方法消除信号中的低频趋势,即消除基准漂移。其程序框图如图4。

图4 WA Detrend VI信号处理程序框图
此方法的原理是:把信号分解成多个尺度,其中基准漂移的低频噪声就分布在某些尺度上;将这些分布有低频噪声尺度下的小波系数设置为零,然后再对信号进行重构便能够消除原信号的基准漂移。主要步骤如下:
(1)对信号进行小波变换的多层分解,得到各尺度下的小波系数。
(2)对WA Detrend VI进行阀值频率设置。通过此阀值频率可以计算出需要处理的尺度。信号将在该尺度下进行消除基准漂移的处理,即强制将此尺度下的小波系数设置为零,消除基准漂移干扰。
(3)信号重构。利用小波逆变换公式重构原信号,得到消除基准漂移的信号。
本文以宁启线K131+322测点的轮轨力应变信号为处理对象。图5显示了原始信号,以及原始信号被Kaiser窗高通滤波器和WA Detrend VI处理后得到的信号波形图。从图中可以看出,原始信号波形图有轻微的基准漂移,其波形图基准线偏离零值线;而经处理后的信号已基本消除基准漂移,并且其波形图基准线与零值线一致。从图中还能发现,经Kaiser高通滤波器处理后得到的波形图比经WA Detrend VI处理后得到的波形图有一定的时间延迟。因此,在这两种消除基准漂移的方法中,小波变换方法更具优势。
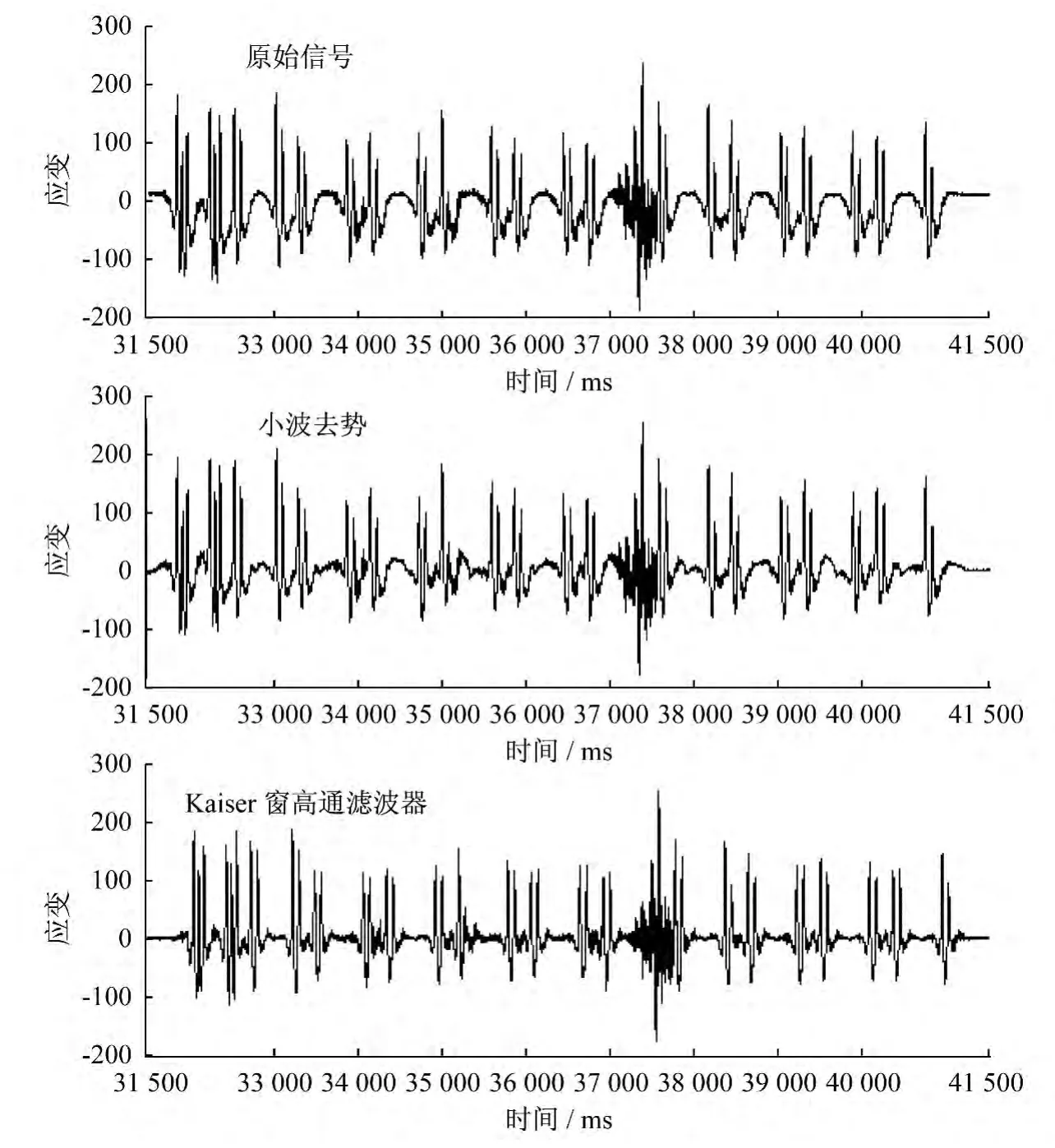
图5 宁启线K131+322测点原始信号及其被Kaiser窗高通滤波器和WA Detrend VI处理后的信号
3 消除宽带噪声
仅消除了基准漂移仍然不能得到准确的轮轨力应变信号,因为还有其他噪声的存在,此时需要继续对信号进行消除噪声的处理。这些噪声是属于宽频带的,并且是复杂随机产生的。传统的数字滤波器并不适用于宽带噪声的消除。LabVIEW的高级信号处理工具包提供了基于小波变换的WA Denoise VI,专门用于消除信号噪声。
WA Denoise VI是基于小波阀值收缩法来去除噪声的,其主要理论依据是:小波变换特别是正交小波变换具有很强的数据相关性,可使信号的能量集中在小波域中的一些大的小波系数中;但是噪声的能量基本分布于整个小波域中,当小波分解后,原信号的小波系数幅值要比噪声的幅值大,因此可以认为,幅值比较大的小波系数一般是以信号为主,而幅值相对较小的系数则很可能是噪声。从而,采用阀值的办法可以保留住信号系数,而使大部分噪声系数减少为零。
在WA Denoise VI上可以进行阀值设置[9],然后利用小波阀值收缩法消除噪声。其处理过程为:将含噪信号在各尺度上分解,保留大尺度低分辨率下的小波系数;然后设定一个阀值,在剩下的各尺度高分辨率的小波系数当中,幅值低于阀值的则变为零,高于阀值的则保留;最后将留下的小波系数进行重构得到有效的信号。
各参数可设置为如下状态:阀值设置是用于指定小波分解时的近似参数和细节参数。在本文的信号处理中采用的是人工阀值的方法,此处阀值规则和调整规则的设置没有意义,因此可以忽略。小波系数在软阀值估计下整体性比较好,因此是否为软阀值这一项选择为真;在综合比较信号基于各种小波类型和分解尺度处理的降噪效果后,小波类型确定为db02以及分解尺度确定为8。表1为 WA Denoise VI的参数设置。
以宁启线K131+322测点所测得的信号为处理对象,其程序框图和前面板的结果分别如图6和图7所示。

表1 WA Denoise VI的参数赋值
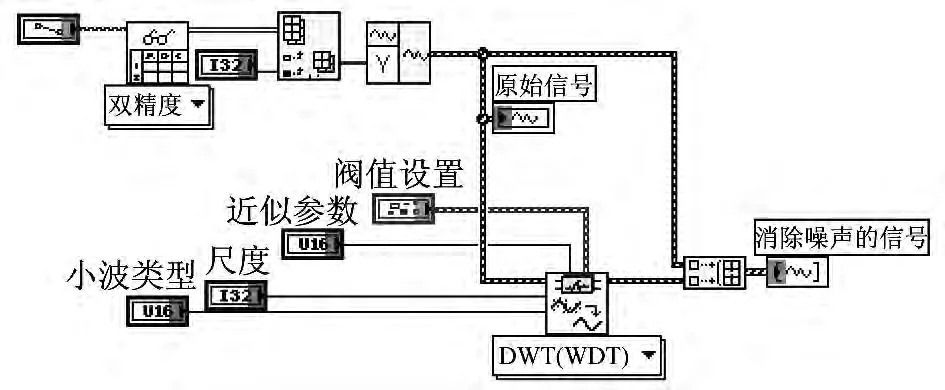
图6 WA Denoise VI消除噪声程序框图
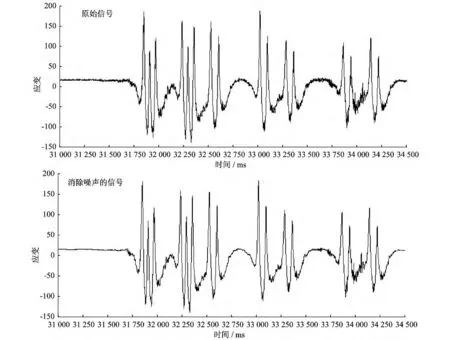
图7 宁启线K131+322测点原始信号和去噪后的信号
通过原始信号和噪声消除后信号对比图可以看出,经噪声消除处理后的信号中极大地抑制了宽带噪声,尤其是在基准线位置的信号比原始信号更加平稳,而在轮轨力峰值部分则很好地保持了轮轨力信号的细节。
4 提取信号特征
在经过消除基准漂移和消除噪声之后,新的信号比原始信号特征更加明显,但在细节部分,尤其是峰值位置的信号仍然保留了原始信号的突变。图8所示是列车车头经过宁启线K131+322测点的波形信号经过消除噪声的情况。
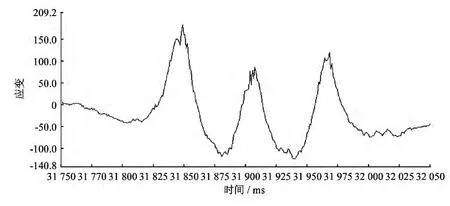
图8 经消除噪声后车头位置的信号
此时若进行峰值计算则可能会在一个波峰位置提取到多个峰值。为了更好从轮轨力应变波形图中提取信号特征,应继续对信号进行处理,即在每个波峰取一个峰值的同时,又能尽量保持信号特征。LabVIEW中高级信号处理工具箱提供的Multiscale Peak Detection VI能很好地解决以上问题。
在波峰或波谷检测前,使用 Multiresolution Analysis VI将信号分解为4级的coif5小波,然后使用A4子带重建出信号。之所以用A4子带进行重建,是因为基于此子带重建的信号可以在保持信号特征的同时更好地被检测到波峰或波谷的峰值点。对于重构后的信号,利用Multiscale Peak Detection VI进行波峰或波谷检测。其原理是:先对此VI进行阀值设置,若是检测波峰,则此阀值可以剔除阀值以下的点,只从大于阀值的点中提取波峰;再者设置宽度,其意义在于把整个信号分成若干区间,区间的长度即是此宽度值,Multiscale Peak Detection VI会在每个区间检测出最大值,即波峰值。基 于 Multiscale Peak Detection VI和Multiresolution Analysis VI信号处理的程序框图如图9所示。
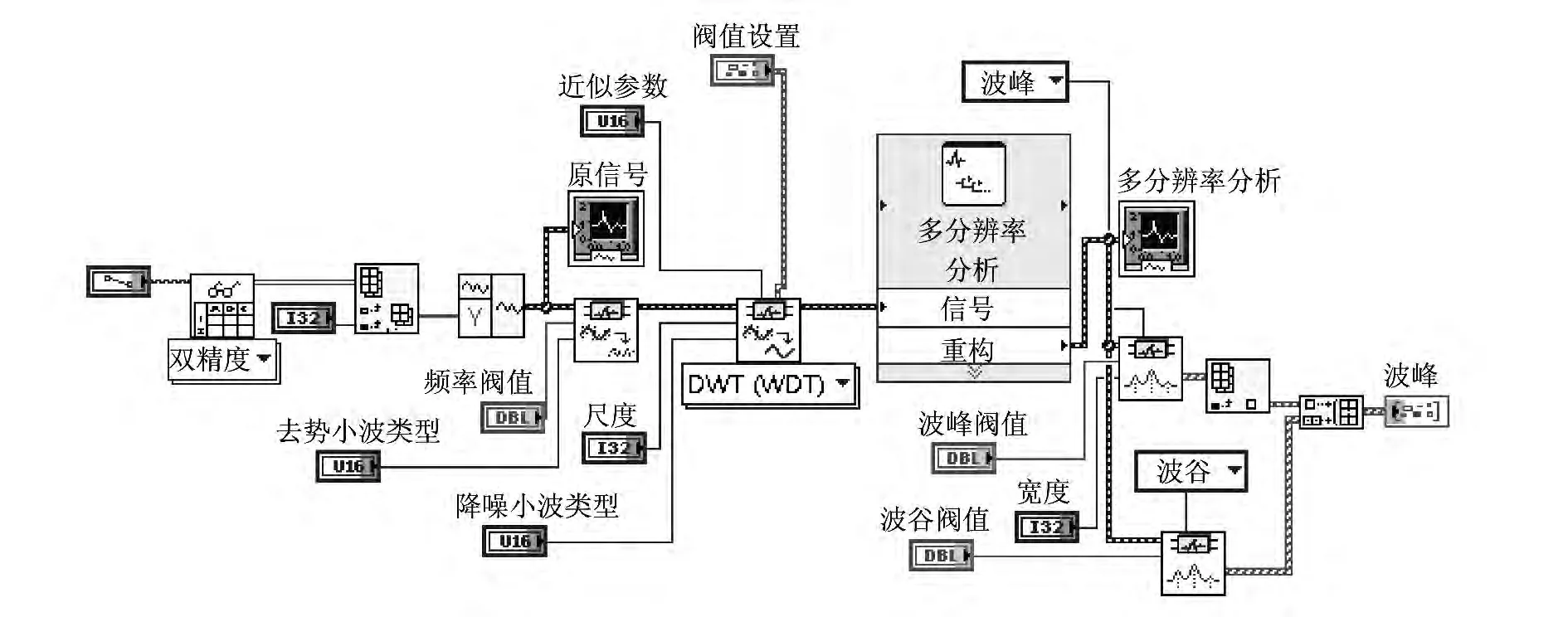
图9 Multiresolution Analysis VI信号处理的程序框图
由于每次处理信号的过程都是遵循分解和重构原则,其过程都由尺度函数、小波函数,以及对偶尺度函数、对偶小波函数所参与,具有线性相位,从而保证了小波变换不失真。尽管经过了多次处理,但每次都只是处理某尺度上的信号,对其他尺度上的信号以及原信号的总体特征并不影响,因此经处理后的信号能与原始信号的特征保存一致。
图10为原信号,经小波消除基准漂移、消除噪声和多分辨率分析后的信号,以及经波峰检测后的信号对比图。从图中可以发现轮轨力应变信号在经过最后多分辨率分析后,经处理后的信号与原信号的信号特征保持一致,失真率小,波峰位置变得平滑,能很直观的定位波峰的位置以及很方便地提取峰值,并且其峰值能代表原信号的应变情况。
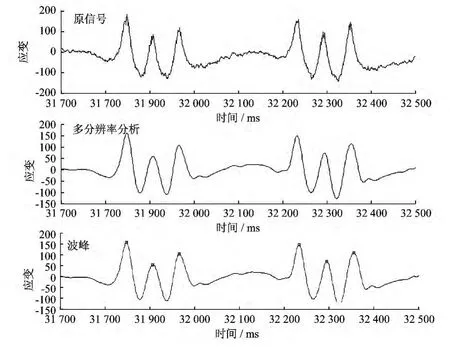
图10 宁启线K131+322测点原始信号,经小波多分辨分析后的信号和波峰检测后的信号
在图10中,每个峰值点代表一个车轮经过待测点时的情况。在提取到波峰的峰值和位置坐标后,通过在现场获得的轮轨力与应变之间的标定系数,可算出每个峰值所代表的轮轨力大小;再结合所给定的轮轨力危险程度判断标准,即可知道每个车轮运行时的危险程度。此外,相邻波峰的横坐标可以用于车轮速度(即每个车轮经过待测点时的速度)的计算。
5 结语
(1)Kaiser窗高通滤波器和Detrend VI都能应用于消除含噪信号的基准漂移,且Detrend VI处理信号的效果更好。
(2)通过相关参数的设置,Denoise VI能很好地消除信号中的宽带噪声。
(3)在消除信号的基准漂移和宽带噪声后,通过Multiresolution Analysis VI对信号的处理能够完整地提取信号特征,获得的波峰极值能够用于后续数据的计算。
[1]练松良.轨道工程[M].上海:同济大学出版社,2006.
[2]洪益飏.地面连续测量轮轨力方法研究[D].成都:西南交通大学,2012.
[3]朱迅杰,邓焱.基于LabVIEW小波分析包的病态心电信号处理[J].电子测量技术,2013,36(4):7.
[4]谢雁,赵凤,李利品,等.基于LabVIEW含水率测量系统设计[J].电子测试,2013(01 -02):59.
[5]张奉军,周燕,曹建国.MALLAT算法快速实现方法及其应用[J].自动化与仪器仪表,2004(6):4.
[6]谢三毛.基于LabVIEW虚拟数字滤波器的设计[J].华东交通大学学报,2005,22(1):83.
[7]陈新波,孙金立,周新模,等.LabVIEW小波分析软件在虚拟超声仪器降噪中的应用[J].无损检测,2005,27(12):643.
猜你喜欢
水利规划与设计(2020年1期)2020-05-25 08:01:28
铁道通信信号(2020年10期)2020-02-07 01:01:02
传感器世界(2019年6期)2019-09-17 08:03:20
西部交通科技(2018年2期)2018-06-14 13:22:40
北京航空航天大学学报(2017年5期)2017-11-23 05:53:59
中国医药指南(2016年1期)2016-07-11 11:57:51
铁道通信信号(2016年6期)2016-06-01 12:10:20
Transactions of Nanjing University of Aeronautics and Astronautics(2015年2期)2015-11-24 02:39:22
电脑知识与技术(2015年24期)2015-11-17 12:25:43
中国铁道科学(2015年5期)2015-06-21 06:53:22
