静电陀螺监控器几种启动模式比较及应用分析
2015-06-15 12:56周海渊倪文秀王前学
中国惯性技术学报 2015年4期
周海渊,倪文秀,潘 良,王前学
(1. 中国卫星海上测控部,江阴 214431;2. 天津航海仪器研究所,天津 300131)
静电陀螺监控器几种启动模式比较及应用分析
周海渊1,倪文秀2,潘 良1,王前学1
(1. 中国卫星海上测控部,江阴 214431;2. 天津航海仪器研究所,天津 300131)
静电陀螺监控器可以全天候提供连续高精度的位置及航向信息,其工作不受天气制约。该设备有码头启动和海上应急启动两种启动模式,海上应急启动根据载体所处的航行工况分为锚泊启动、漂航启动、等纬度航行启动三种模式。该设备启动流程较为复杂,分为陀螺对准、陀螺启动、六次校准、系统标定、系统导航五个子过程,不同启动模式对应的外界工况对各子过程的启动细节存在一定影响,进而导致不同启动模式设备导航精度存在一定差异。针对上述问题,通过分析设备结构和工作原理,结合测量船设备多次应用该设备的工作经验,将静电陀螺监控器几种启动模式对设备启动子过程的影响进行了综合比较分析,最后结合不同启动模式设备的导航精度提出了对应的应用建议,为静电陀螺监控器在不同状态下的启动和应用提供借鉴。
静电陀螺监控器;启动方式;六次校准;系统标定
静电陀螺监控器(以下简称ESGM)作为校准设备,与惯性导航系统(INS)组合使用可以有效延长INS的重调周期,提高系统精度[1-5]。而ESGM的系统精度取决于解算通道所使用参数的估计准确度,而对这些参数的估计与陀螺对准、陀螺启动、六次校准、系统标定等阶段都有密切的关系。
ESGM安装于测量船后工作超过1万小时,期间对码头启动、锚泊启动、漂航启动、等纬度航行启动等各种启动方式都进行了相关试验。本文通过分析设备启动过程的工作原理,结合实际应用所积累数据,将几种启动模式对设备精度的影响程度进行了综合比较分析,最后提出了应用建议,为该设备在不同工况下的启动和应用提供了有效的参考。
1 ESGM启动关键过程
ESGM安装有两个静电陀螺仪,模拟两颗恒星。极陀螺动量矩H1的指向与地球极轴平行,赤道陀螺动量矩H2的指向与赤道面平行。ESGM通过复示平台跟踪当地水平面,陀螺仪动量矩轴在惯性空间内的指向,在地平坐标系内用高度角h和方位角q表示,在赤道坐标系内用赤纬δ及地方时角S*表示,其中h和q通过对陀螺仪方位环和高度环的测量得到,δ和S*通过测量通道计算得出。因此,启动过程中陀螺仪动量矩轴的对准精度直接影响着设备的导航精度。ESGM启动的过程可以分为陀螺对准、陀螺启动、六次校准、系统标定、系统导航5个阶段,以下针对不同工况条件对陀螺仪启动的影响进行分析。
1.1 陀螺对准
由于静电陀螺无法通过施加力矩的方式调整动量矩,因此在转子转动之前必须驱动h、q来使其几何轴处于如公式(1)所示的理论指向[6]。

陀螺对准阶段,利用对高度环和方位环的测量值解算得出him和qim,然后通过引入当地经纬度、INS航向及水平姿态信息,将公式(1)中的相关角度转换成极陀螺、赤道陀螺的高度角h0i和方位角q0i。最后如公式(2)所示,通过调整测量通道与解算通道之间的误差,将Δhi、Δqi逼近为零,使陀螺仪动量矩轴构建精确的惯性坐标系(i=1,2分别表示极陀螺、赤道陀螺)。
1.2 陀螺启动
陀螺完成对准,需要通过加速使其旋转以便建立惯性空间,该过程分为一次加速、阻尼定中、二次加速三个阶段。一次加速为陀螺提供初始转动动量矩,转速约为20 Hz,阻尼定中使转子动量矩轴与陀螺壳体的几何对称轴趋于一致,阻尼精度在10'左右。二次加速陀螺转速达到300 Hz,最后采用锁相环技术,控制其精度在±0.1 Hz,实现对陀螺转子的稳速闭环控制。之后ESGM进入随动状态,惯性坐标系初步形成。
在陀螺整个加速过程中需要根据载体所处的航行工况实时对h、q不断调整才能保证陀螺动量矩轴的精确指向,一般调整精度保持在5′以内,这也是陀螺仪启动的难点和关键所在。
1.3 六次校准
六次校准[7]的作用在于利用已经预先装订的陀螺漂移参数、地球自转角速度ωe及陀螺动量矩相对赤道坐标系的初始位置角(赤纬δi(0)、地方时角Si*(0)),迭代解算瞬时的赤纬δip(t)和地方时角Si*p(t)及格林威治时角Sip(t),如公式(3)所示,其中后两项可以由预知参数计算。

陀螺初始位置角由对应时刻陀螺在水平坐标系中测量的hi′和qi′经过球面三角变换求得。陀螺动量矩在赤道坐标系的位置角δi和Si与其在水平坐标系中的位置角hi′和qi′之间的关系如公式(4)所示:
1.4 系统标定
六次校准结束后,进入48 h系统标定阶段。该过程以经过三角变化后的δim(t)、Si*m(t)作为准确值,经过一系列修正、平滑代表了陀螺动量矩实际的瞬间指向。计算δip(t)、Si*p(t)过程中,地球自转角速度ωe可以预知,初始位置信息、GPS实时位置信息是已知信息。因此标定过程的解算数据中仅包含了陀螺初始位置误差信息以及陀螺漂移参数误差Δm01、Δm02、Δn11、Δn12、Δn22。
测量通道和解算通道误差如公式(5)所示。在整个标定过程中,使用测量通道结果经过卡尔曼滤波迭代解算Δδi(t)、ΔSi*(t)中反映的初始位置误差Δδi(0)、ΔSi*(0)以及相关陀螺漂移Δm01、Δm02、Δn11、Δn12、Δn22。

标定过程的唯一可观测量称为Z矢量,该矢量是Δδi(t)、ΔSi(t)的线性组合,反映了Δδi(t)、ΔSi(t)的变化情况,如公式(6)所示:
式中,Z1、Z2、Z3有着明显的几何意义:Z1是极陀螺和赤道陀螺H轴之间的夹角计算误差,Z2是极陀螺H轴在当地子午面上的位置角计算误差,Z3是赤道陀螺H轴在赤道面上的位置角计算误差。
1.5 系统导航
标定结束后系统转入导航阶段,此时解算通道各参数已经相当精确。由于ESGM工作是建立在INS基础之上,此时的测量通道结果包括了INS的航向和位置误差信息,如公式(7)所示可以使用Δδi(t)、ΔSi(t)来修正INS误差,完成监控功能。

2 启动方式对启动过程的影响
在陀螺对准和启动阶段,通过对hi和qi持续调整才能保证六次校准和系统标定过程中对于陀螺漂移参数和陀螺初始位置的计算精度。在ESGM中位置信息与陀螺H轴之间存在公式(8)所示的关系:

从公式(8)可以看出,极陀螺H轴的高度角h1、方位角q1有着明显的几何意义,纬度φ变化量对应极陀螺高度角变化量,航向K变化量对应方位角变化量。由于在不同的航行工况下纬度和航向变化情况不同,因而导致ESGM在不同航行工况下的启动过程中测量通道需要调整的复杂程度也不一样。
2.1 码头启动
在码头条件下,船舶航向、位置信息为固定值,当陀螺完成对准后,测量通道h1、q1、h2、q2四个参数几乎不受影响,直至完成陀螺加速,期间不需要重新调整陀螺动量矩方向,因此两个陀螺可以同时启动。虽然码头启动操作简单且设备精度较高,但是受到严重的应用限制。
2.2 锚泊启动
锚泊一般是在近海锚地,由于载体一端被锚链固定于海底,在近海洋流作用下其航向变化十分频繁[8],如图1所示,在1 h内航向变化范围为150°~350°。
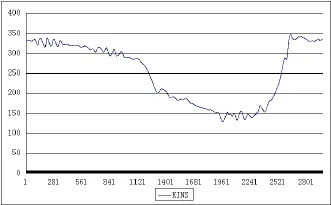
图1 锚泊情况下载体航向Fig.1 Carrier heading under mooring condition
如图2所示,航向变化率最快达到2.7 (°)/s,从航向变化速率可以发现,锚泊状态的航向变化没有固定的规律。
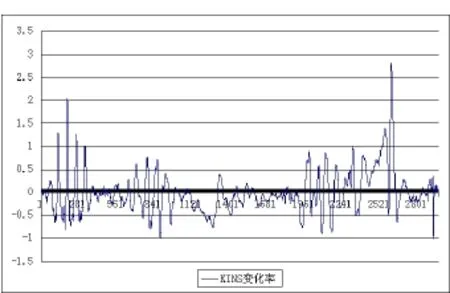
图2 锚泊情况下载体航向变化率Fig.2 Changing rate of carrier heading under mooring condition
当陀螺完成对准后,航向变化导致q1、q2变化较大需要实时调整,而实际操作中h1、h2虽然变化不大,但是也需要一定的调整。因此综合以上因素考虑,无法确保两个陀螺同时启动的精度,实际使用中一般采用两个陀螺分时启动。
另外,在这种状态下,INS的航向和位置数据发散严重,而ESGM工作需要INS的位置、航向信息作为支撑。上述情况在一定程度上影响到ESGM惯性坐标系精度和后续导航参数的标定精确度。
2.3 漂航启动
漂航一般是在远海海况较好的情况下进行,此时远海洋流流向和流速较为稳定,漂航状态下载体艏艉方向垂直于洋流方向并随洋流移动,载体的航向和位置都不固定但是变化都比较小。如图3所示,由于浪涌、洋流冲击,载体在航向在267°附近变化,但是航向变化不超过1°。
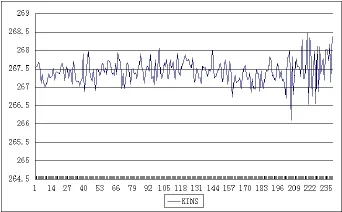
图3 漂航情况下载体航向Fig.3 Carrier heading under drift condition
当陀螺完成对准后,h1、q1、h2、q2四个参数中,都需要视情调整,但是调整幅度较小,调整的频率也不高。这种情况下两个陀螺可以同时启动也可分时启动,当然分时启动的难度更小一些。漂航条件下支撑ESGM工作的INS数据精度也能得到保障,再者载体没有动力消耗,因此这种方式是ESGM启动的较为灵活且经济实用的方式。
2.4 等纬度启动
等纬度航行启动是ESGM目前较为标准的海上应急启动方式,从陀螺对准、陀螺启动至完成六次校准,载体提供6 h等纬度航行。如图4所示,这种情况下载体的航向较为稳定,在90°附近,变化不超过±1°。
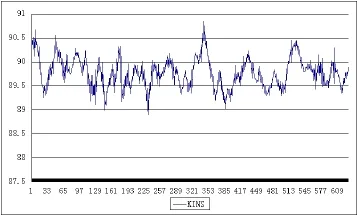
图4 等纬度情况下载体航向Fig.4 Carrier heading under equal-latitude condition
当陀螺完成对准后,q1、q2有较为明显变化,视情调整即可。根据实际工作经验,h1、h2变化不大几乎不用调整,两个陀螺可以分时启动也可以同时启动。
等纬度航行虽然存在诸多优点,但是也存在一定局限,首先要求载体改变航行计划,其次如果在漂航状态测量船航行那么会徒增燃料消耗。
3 启动方式对设备精度的影响
反应ESGM精度的有三个量,一是Z矢量,二是陀螺漂移参数,三是航向精度。下面从上述三个方面对各种启动方式的设备工作情况进行分析。
3.1 启动方式对Z矢量影响
图5是四中启动方式的Z矢量曲线。在码头和锚泊状态下,载体静止Z曲线是比较平滑的,以24 h为周期变化的三角函数曲线,码头Z曲线峰峰值为3,锚泊Z曲线峰峰值为10,这是由于码头载体水平姿态变化比锚泊状态小;在漂航和等纬度航行下,Z曲线依然存在24 h为周期变化的三角函数关系,但是曲线不平滑,规律不明显,这是由于载体运动和姿态变化较大的结果。比较分析不难发现,载体所处的外界环境越好,标定Z矢量误差越小,因此设备启动应该选择良好的外界环境。
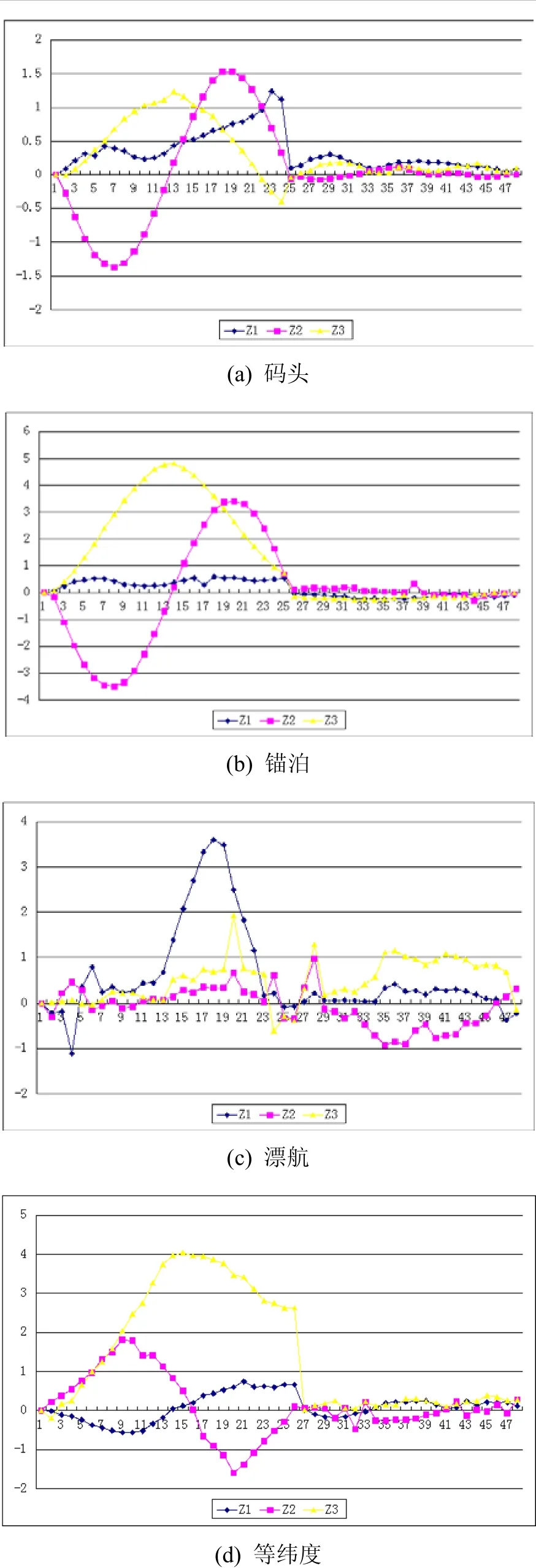
图5 不同启动方式Z矢量曲线Fig.5 Z vector curves in different start-up modes
3.2 启动方式对陀螺漂移参数影响
ESGM设备有五个可观测的陀螺漂移参数,分别是m01、m02、n11、n12、n22,其中m02在设备导航后每24 h更新一次,其余参数则不再变化。表1为四种启动模式下的陀螺漂移系数。在设备进入导航状态后各参数属于同一数量级,没有明显的区别。
由于参数m02的特殊性,该参数直接反应了设备的精度和工作情况。在ESGM中,对m02设置了理论门限(绝对值小于0.484 810×10-7)。表2对ESGM四种启动模式中的m02进行了统计,可以看出,锚泊启动时m02发散较快,导航72 h该数据接近理论门限,导航240 h该数据远超理论门限。
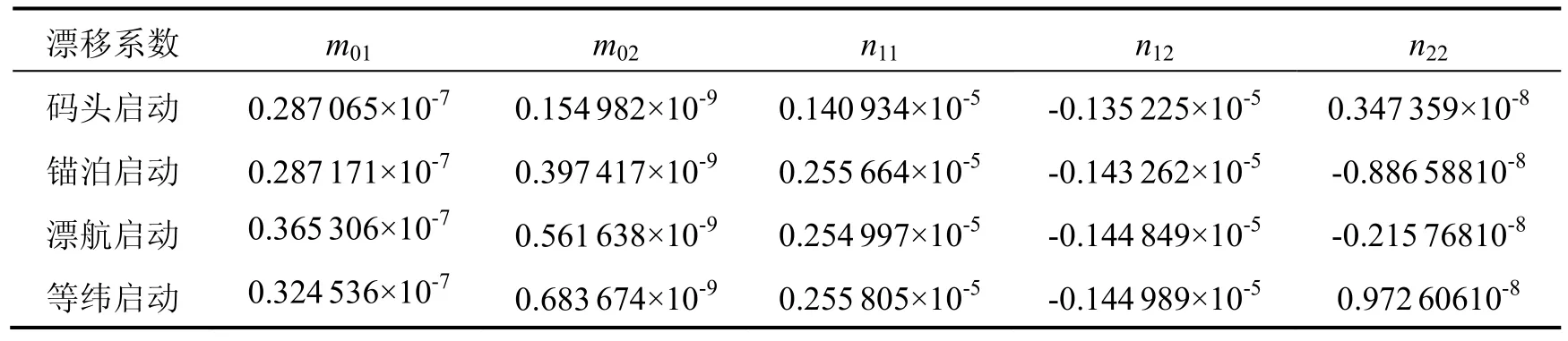
表1 ESGM陀螺漂移参数比对表Tab.1 Comparison on drift parameters of ESGM gyroscope in different start-up modes

表2 ESGM陀螺漂移参数m02变化情况比对表Tab.2 Comparison on drift parameter m02of ESGM gyroscope in different start-up modes
3.3 启动方式对航向精度影响
ESGM航向误差如表3所示,可以看出,码头、漂航和等纬度三种启动方式下基本一致,而锚泊启动的72 h和240 h航向误差都较大,同时也说明了ESGM航向误差的变化情况与m02变化情况完全一致。
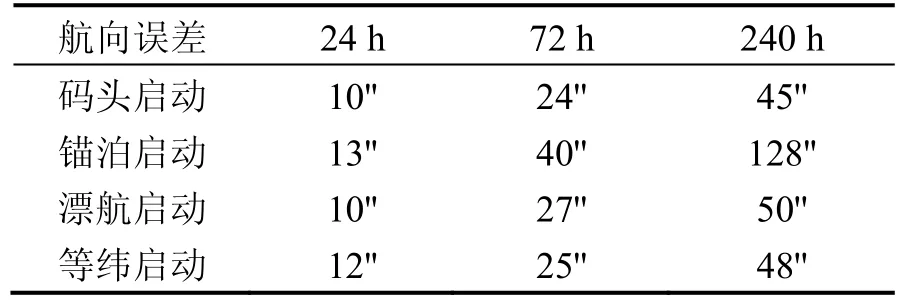
表3 ESGM航向精度比对表Tab.3 Comparison on ESGM heading precisions in different start-up modes
4 启动方式特点归纳与应用建议
综合前面分析,可以用表4来说明各种启动方式的特点。
鉴于表4及前面分析结果,在四种启动模式中,提出以下应用建议:
① 在有条件和工作性质允许的情况下,尽可能使用码头启动方式,无论从启动难易程度还是航向精度考虑,这种方式都是首选。但是需要出航前完成ESGM启动,同时必须考虑到长时间工作后数据的发散,再者加以码头条件的限制,该方式精度虽高但是应用显得不够灵活。
② 如果载体长时间海上工作,建议采用海上等纬度航行或者漂航启动,这两种方式难易程度和航向精度相当,同时也能满足指标要求。具体采用哪种方式,可以结合载体的航行计划以及节能减排综合考虑定夺,这两种方式应用较为灵活。
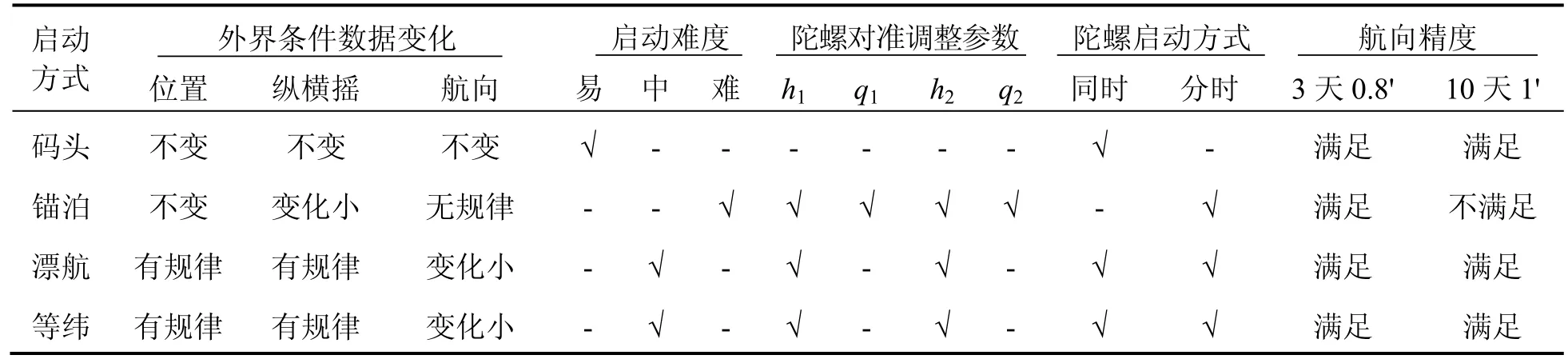
表4 ESGM启动方式分析结果汇总表Tab.4 Summary on analysis results of ESGM start-up modes
③ 锚泊启动方式虽然也能够完成设备启动,但在此不推荐采用,这是由于航向变化较快而且规律较难把握,启动难度较大。在实际应用中又由于航向频繁变化,导致INS设备航向误差、位置误差较大,进而会影响ESGM设备的启动精度,长时间工作下航向精度难以保障。
5 结 论
ESGM有着多种的启动方式,不同启动方式对启动流程的难易程度有着不同的约束,对设备的导航精度也有不同程度的影响。本文从设备工作原理入手,分析了设备启动方式对启动过程和设备精度的影响,总结了各种启动方式的特点,提炼出了具体可行的ESGM启动方式应用建议。本文研究成果是对ESGM几十次次启动和近万小时应用的经验总结,对于设备的应用具有较强的实用价值。
(References):
[1] 冯鸿奎, 李晓勇, 薛国虎, 等. 航天测量船导航系统ESGM技术[J]. 飞行器测控学报, 2010, 29(1): 28-33. Feng Hong-kui, Li Xiao-yong, Xue Guo-hu, et al. Application of ESGM technique on space instrumentation ships[J]. Journal of Spacecraft TT&C Technology, 2010, 29(1): 28-33.
[2] Christensen W. Advanced development of ESG strap -down navigation system[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 2(2): 143-157.
[3] Zhang Ke-zhi, Tian Wei-feng, Qian Feng. Combination of distributed Kalman filter and BP neural network for ESG bias model identification[J]. Transactions of Nanjing University of Aeronautics & Astronautics, 2010, 27(3): 226-231.
[4] Yang Gong-liu. Study on simulation techniques for marine integrated navigation system[C]//Second International Symposium on Inertial Technology in Beijing. Beijing, 1998.
[5] Hill D A, Letendre T, Mills H A. Embedded real-time DSP control of an electrostatically gyroscope[C]//Proceeding of the American Control Conference. Boston, 2004.
[6] 王前学, 倪文秀, 刘巍, 等. 静电陀螺监控器海上赤道陀螺仪低纬度下的随动性能[J]. 中国惯性技术学报, 2010, 18(1): 90-92. Wang Qian-xue, Ni Wen-xiu, Liu Wei, et al. Servo performance of ESGM’s equatorial gyroscope in low-latitude regions[J]. Journal of Chinese Inertial Technology, 2010, 18(1): 90-92.
[7] 刘新民, 孙学成, 周琳琦, 等. 静电陀螺监控器海上“六次校”方法[J]. 中国惯性技术学报, 2011, 19(4): 309-402. Liu Xin-ming, Sun Xue-cheng, Zhou Lin-qi, et al. Method of electrostatic gyroscope monitor’s maritime six-times calibration[J]. Journal of Chinese Inertial Technology, 2011, 19(4): 309-402.
[8] 石敬, 李泽, 宋健力, 等. 静电陀螺监控器锚泊启动方法.[J]. 中国惯性技术学报, 2013, 21(2): 174-177. Shi Jing, Li Ze, Song Jian-li, et al. Experiment on marine anchoring start of electrostatic gyro monitor[J]. Journal of Chinese Inertial Technology, 2013, 21(2): 174-177.
Comparison and application analysis on several ESGM starting modes
ZHOU Hai-yuan1, NI Wen-xiu2, PAN Liang1, WANG Qian-xue1
(1. China Satellite Maritime Tracking & Controlling Department, Jiangyin 214431, China; 2. Tianjin Navigation Instrument Research Institute, Tianjin 300131, China)
Electrostatic gyro monitor can continuously provide all-weather high-precision position and heading information. ESGM has two start-up modes, i.e. dock static start-up and maritime emergency start-up. According to the carrier’s navigation condition, the maritime emergency start-up is divided into mooring start-up, drift start-up, same latitude sailing start-up. The boot process is rather complicated and can be divided into gyro starting alignment, gyro start-up, six calibration, system calibration, system navigation. The external working conditions in different start-up modes would have different impacts on the details of each starting process and hence the equipment’s navigation precisions. In view of the above situation, the ESGM’s structure and working principle is analyzed combining with the working experience of TT&C ship, and a comprehensive comparative analysis among the several ESGM starting modes is studied. Finally an application suggestion is proposed, and it can provide effective application reference for ESGM in different states of the start-up.
electrostatic gyro monitor; start-up; six calibration; calibration system
U666.1
A
1005-6734(2015)04-0467-05
10.13695/j.cnki.12-1222/o3.2015.04.009
2015-03-26;
2015-07-09
周海渊(1982—),男,工程师,从事惯性导航设备应用研究。E-mail:lynn9527@gmail.com
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
小学生学习指导(低年级)(2019年10期)2019-10-16
民用飞机设计与研究(2019年4期)2019-05-21
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
舰船科学技术(2018年8期)2018-09-02
快乐语文(2018年36期)2018-03-12
电子制作(2017年24期)2017-02-02