一类新型永磁作动机构的电磁力建模
2015-06-12 12:32赵志锋杨焱煜邵长星
自动化仪表 2015年9期
赵志锋 杨焱煜 邵长星 王 永
(中国科学技术大学自动化系,安徽 合肥 230027)
一类新型永磁作动机构的电磁力建模
赵志锋 杨焱煜 邵长星 王 永
(中国科学技术大学自动化系,安徽 合肥 230027)
针对一种新型永磁作动机构的电磁力模型,首先采用等效磁路法获得机理模型;然后基于该模型,设计了电磁力与气隙、电流的测量实验方案;利用MTS809力学实验系统获取实验数据,采用最小二乘法辨识得到电磁力的解析模型;最后以永磁作动机构作为执行机构的高压断路器原型机实验系统进行合闸仿真和实验。实验结果表明,该方法比一般建模方法更准确。
电磁力 等效磁路法 实验建模 最小二乘辨识 高压断路器 永磁作动机构
High-voltage circuit breaker Permanent magnetic actuator
0 引言
随着智能控制在生产生活中得到越来越广泛的应用,传统的机械式作动机构由于复杂的结构和高故障率已经不能满足要求。永磁式作动机构因具有结构简单、无噪声、没有机械磨损以及使用寿命较长等特点,在众多领域得到了应用[1-4]。
但是永磁作动机构因其磁路复杂,以及磁饱和、磁泄漏等因素,使电磁力建模成为一个研究的难点。电磁力建模一般可以分为等效磁路法建模[5-6]、实验法建模[7-9]和有限元分析法建模[10]三种方法。一般来说,等效磁路法建模比较简单,但是误差较大;实验建模严重依赖机理模型的准确性;有限元分析法建模计算量较大,过程复杂。本文针对一种新型永磁作动机构的电磁力模型,提出了等效磁路法和实验法相结合的建模方法获得其电磁力模型,并以此模型为基础,通过以永磁作动机构作为执行机构的高压断路器进行合闸仿真与实验,验证了该模型的正确性和新型永磁作动机构的有效性。
1 新型永磁作动机构
典型双稳态永磁作动机构一般将永磁体对称分布在定子两侧,具有结构简单、可靠性高等特点,但是随着永磁作动器的广泛应用,对其提出了更高的要求:需要具有更好的加减速能力[11]。
新型永磁作动机构,采用永磁体代替典型电磁作动机构的动铁心,在相同质量情况下,新磁体将比铁心产生更大的作用力,既可加速运动也可减速运动。其结构如图1所示,图1中阴影为铁磁材料。
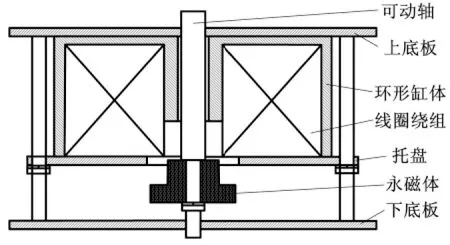
图1 新型永磁作动机构结构图
新型永磁作动机构的工作原理是,永磁体提供稳定的偏置磁通,线圈提供控制磁通,即当线圈中通以正向电流时,线圈产生的磁场与永磁体产生的磁场方向相同,使永磁体和可动轴组成的动子向上运动;当线圈中通反向电流时,线圈产生的磁场与永磁体产生的磁场方向相反,定子对动子产生向下的斥力,使动子向下运动。
2 电磁力等效磁路法建模
针对新型永磁作动器的结构,假设气隙磁场均匀且忽略漏磁通和铁磁材料的磁阻,则其等效磁路如图2所示。
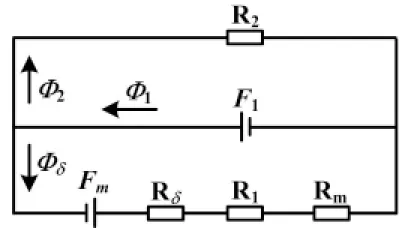
图2 新型永磁作动机构等效磁路
图2中,F1为通电线圈产生的磁动势,Fm为永磁体产生的磁动势,Rm为永磁体等效磁阻,R1为由线圈到永磁体底部气隙的等效磁阻,R2为线圈缸体间隙等效磁阻,Rδ为永磁体与线圈间气隙的等效磁阻,Φ1为流经线圈的总磁通量,Φδ为流经永磁体的磁通量,Φ2为流经线圈支路的磁通量。
则由磁路定理可得:
(1)
由式(1)可得:
(2)
线圈产生的磁动势F1为:
F1=iN
(3)
式中:i为线圈中电流;N为线圈匝数。
气隙的等效磁阻Rδ为:
Rδ=δ/(μ0Am)
(4)
式中:δ为永磁体与线圈间气隙长度;μ0为空气磁导率;Am为永磁体与线圈间正对面积。
磁通量与磁感应强度的关系为:
Φδ=AmBδ
(5)
式中:Bδ为永磁体与线圈间气隙中的磁感应强度。
气隙磁场对永磁体的引力为:
(6)
磁阻R1是与气隙长度δ相关的物理量,近似等效为气隙长度δ的一次函数:
R1=R0+kδ
(7)
式中:R0为当永磁体处于最上端位置时R1的初值;k为斜率。
将式(2)~式(5)、式(7)代入式(6),可以得到作动机构在通入电流i,永磁体和线圈气隙为δ时所产生电磁力为:
(8)

(9)
当新型永磁作动机构的结构确定后,N、Am、k、Fm、R0、Rm以及μ0均为常数,因此α、λ1、λ2也为常数。
孟令雷[9]等采用的Daley S[12]电磁力模型为:
(10)
与式(10)相比,式(9)所示模型分析了永磁体的作用。当电流为零时,作动机构所产生的电磁力随着气隙长度变化,与实际情况相吻合;而DaleyS电磁力模型在电流为零时,电磁力始终为零。同时,若直接采用式(8)作为电磁力模型,除了各个参数的确定存在误差之外,该模型也是在假设气隙磁场均匀且忽略漏磁通和铁磁材料的磁阻情况下得到的,因此误差较大。下面将基于式(9)电磁力模型进行实验建模。
3 电磁力实验建模
3.1 电磁力测量实验系统
为了获得电磁力与气隙及线圈电流之间的精确关系,本实验采用MTS809力学实验装置测量永磁作动机构的作用力和永磁体的位移,控制器采用TMS320F28335。控制器产生控制信号输出给直流驱动器,直流驱动器根据控制信号产生需要的电压加在作动器线圈两端,在线圈中产生需要的电流,同时直流驱动器反馈电流信号给DSP。实验系统框图如图3所示。
MTS809力学实验系统是一种可以测量多种材料动静态力和位移等实验的装置。
将永磁作动机构置于MTS809力学实验装置的上夹具和下夹具之间,其中上夹具固定不动,下夹具随着永磁作动机构位移上下移动。在一定位移和电流情况下,MTS809的力学传感器和位移传感器将精确记录永磁作动机构产生的力和位移,并由其采样系统保存。电流是由控制模块所给定的电压信号确定的,并由驱动器反馈给DSP模块,由DSP模块记录。
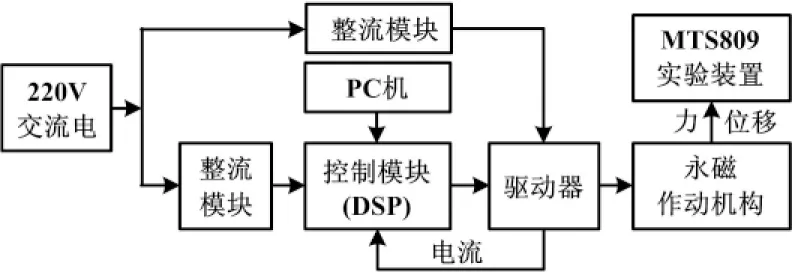
图3 实验系统框图
3.2 电磁力参数辨识
对实验所得数据,剔除明显与同组数据相差太大的数据,求取同组相同气隙和电流下电磁力的平均值,即为该气隙和电流下的电磁力。最后,因测量时MTS809记录的力大小包含永磁作动机构产生的电磁力以及可动轴和永磁体的重力,去除重力后,才是需要的电磁力。
由式(9)可得:
(11)
令:
(12)

Y=Xθ
(13)
根据实验数据采用最小二乘辨识方法辨识式(13)中的参数θ,则其估计为:
θ=(HTH)-1HTZ
(14)
式中:H为输入矩阵,由采集到不同时刻的系统输入向量X构成;Z为输出矩阵,由采集到不同时刻的输入Y构成。计算得到θ,然后根据式(12)求解式(9)中的参数α、λ1、λ2的估计,得到电磁力精确解析模型为:
(15)
将永磁作动机构实际输出电磁力与辨识所得模型的结果,分别在电流i为0、0.912 A、3.350 A时进行拟合,其拟合情况分别如图4~图6中的辨识曲线1所示。采用Daley S电磁力模型辨识结果分别如图4~图6中的辨识曲线2所示。
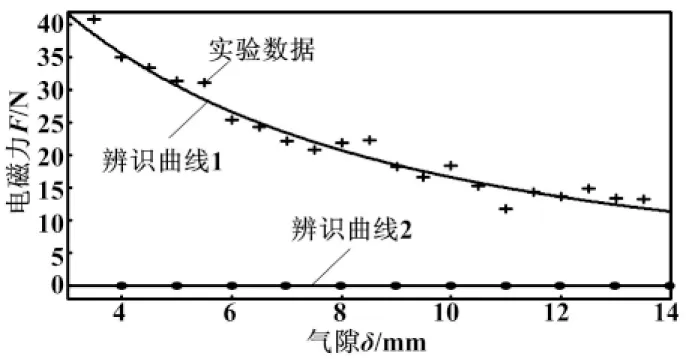
图4 电流为0时电磁力辨识曲线
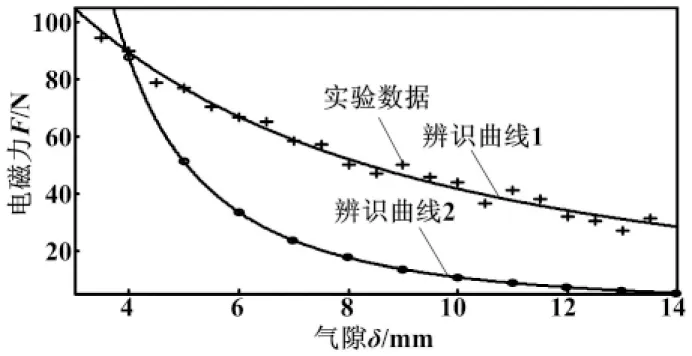
图5 电流为0.912 A时电磁力辨识曲线

图6 电流为3.350 A时电磁力辨识曲线
从图4~图6可以看出:首先,采用式(9)所示电磁力模型比Daley S电磁力模型辨识所得结果更能准确反映新型永磁作动机构电磁力与电流、气隙之间的关系,不仅辨识误差较小,而且在电流为零时,能够体现永磁体产生的作用与气隙之间的关系;其次,从三幅图的对比中可以看出,随着电流的增大,电磁力抖动的绝对幅值越来越大,这是由于随着电流增大,电磁力相对气隙δ而言变化更大的缘故;最后在图6中,气隙较小时,永磁作动机构实际输出小于辨识所得模型的输出,这是因为在电流较大、气隙较小时,出现了磁饱和现象。整体而言,相较于辨识曲线2,三幅图的实验数据与辨识曲线1有较好的拟合。
3.3 实验验证
为了验证永磁作动机构电磁力模型的准确性和控制效果,设计了采用永磁作动机构作为执行机构的永磁高压断路器的原型机实验系统。高压断路器的合闸相对分闸较难控制,弹跳指标和合闸时间较严格,因此采用永磁高压断路器的合闸进行验证实验。
对永磁高压断路器分别采用电磁力机理模型式(8)和辨识所得电磁力模型式(15)进行合闸仿真和实验,结果分别如图7和图8所示。

图7 电磁力辨识模型合闸仿真和实验结果

图8 电磁力机理模型合闸仿真和实验结果
从图7可以看出,在4 ms处,仿真曲线开始合闸动作,由于磁饱和现象,实验曲线直到7 ms多才开始缓慢动作;在合闸前开始产生制动电流,使接触瞬间的永磁体和线圈之间的力为零,但是同样由于磁饱和现象和反力弹簧的作用力,产生了约2 ms的弹跳。而图8所示的机理模型的合闸实验结果与其仿真结果相比,由于模型精度的误差较大,出现了严重的延时和弹跳,弹跳时间超过20 ms,幅值超过1 mm,这对于高压开关来说是不可接受的,将严重影响供电质量。从以上两幅图的对比可以得出,这种电磁力等效磁路法和实验法建模相结合的办法是准确而且有效的。
4 结束语
为了对一种新型永磁作动机构进行控制,本文提出一种机理建模和实验建模相结合的方法对新型永磁作动机构的电磁力进行建模,得到了电磁力解析表达式,并在永磁高压断路器的原型机上进行电磁力控制实验进行验证。仿真实验结果对比表明:与传统实验建模法和机理建模法相比,该方法所得模型准确反映了永磁作动机构电磁力模型的特性,能够精准完成高压断路器的开合闸动作。
[1] Hou E Y, Lin K. Investigation of axial carrying capacity of radial hybrid magnetic bearing[J]. IEEE Transactions on Magnetics, 2012, 48(1): 38-46.
[2] Yang S M. Electromagnetic actuator implementation and control for resonance vibration reduction in miniature magnetically levitated rotating machines[J]. IEEE Transactions on Industrial Electronics, 2011, 58(2): 611-617.
[3] 陈昊,王永,李嘉全,等.基于饱和约束LMS算法的磁悬浮隔振器控制研究[J].振动与冲击,2012,31(13):125-128.
[4] Dong J C, Dong K W, Jong S R, et al. Novel electromagnetic actuator using a permanent magnet and an inter-locking mechanism for a magnetic switch[J]. IEEE Transactions on Magnetics, 2013, 49(5): 2229-2232.
[5] Marco A P, Philip T. Krein. Force calculation in 3-D magnetic equivalent circuit networks with a maxwell stress tensor[J]. IEEE Transactions on Energy Conversion, 2009, 24(3): 587-593.
[6] 宋澜,王法,邵长星,等.一种新型永磁驱动操作机构及其控制方案[J].中国机械工程,2011,22(9):1049-1053.
[7] 宋春生,张锦光,张建国.基于混合算法的磁悬浮隔振器模型辨识与验证[J].中国机械工程,2014,25(14):1929-1934.
[8] 梁青,段小帅,倪向贵,等.磁悬浮隔振器动态电磁力实验与建模[J].实验力学,2009,24(3):228-232.
[9] 孟令雷,倪向贵,王永,等.基于MTS809的磁悬浮隔振器电磁力测量[J].自动化与仪表,2009,24(3):4-7.
[10]Yoshihiro K, Tadashi Y, Kei I,et al. 3-D finite element analysis of dynamic characteristics of electromagnet with permanent magnets[J]. IEEE Transactions on Magnetics, 2006, 42(4): 1339-1342.
[11]宋澜,王法.一种双稳态永磁驱动操作机构的设计[J].机械科学与技术,2011,30(12):2073-2076.
[12]Daley S, Johnson F A, Pearson J B,et al. Active vibration control for marine applications[J]. Control Engineering Practice, 2004(12): 465-474.
Modeling of Electromagnetic Force for a Novel Type of Permanent Magnetic Actuator
Aiming at the electromagnetic force model for a novel type of permanent magnetic actuator (PMA), firstly, the mechanism model is obtained by adopting equivalent magnetic circuit method, then the measurement experimental scheme for electromagnetic force, air gap and current is designed based on this model; and the experimental data are acquired using MTS809 (mechanics) test system; the analytical model is obtained by using least squares identification; finally, the closing simulation and test are conducted for the prototype experimental system of high voltage circuit breaker with PMA as the actuation mechanism. The test result indicates that this method is more accurate than general modeling methods.
Electromagnetic force Equivalent magnetic circuit method Experimental modeling Least squares identification
赵志锋(1987-),男,现为中国科学技术大学控制科学与工程专业在读硕士研究生;主要从事振动主动控制方面的研究。
TP273
A
10.16086/j.cnki.issn1000-0380.201509012
修改稿收到日期:2015-05-26。
猜你喜欢
重庆理工大学学报(自然科学)(2022年9期)2022-10-26
电机与控制学报(2022年5期)2022-06-23
大电机技术(2022年1期)2022-03-16
计算机仿真(2022年1期)2022-03-01
防爆电机(2021年5期)2021-11-04
上海大中型电机(2021年1期)2021-06-09
微特电机(2020年11期)2020-12-30
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
防爆电机(2020年3期)2020-11-06