
基于遗传算法的排爆机械手最优轨迹规划
2015-06-12 12:35张云峰马振书孙华刚陆继山
装甲兵工程学院学报 2015年2期
张云峰, 马振书, 孙华刚, 陆继山
(1. 军械工程学院弹药工程系,河北 石家庄 050003; 2. 63908部队,河北 石家庄 050000)
基于遗传算法的排爆机械手最优轨迹规划
张云峰1, 马振书2, 孙华刚2, 陆继山1
(1. 军械工程学院弹药工程系,河北 石家庄 050003; 2. 63908部队,河北 石家庄 050000)
针对一种排爆机械手的轨迹规划问题,提出了一种时间-脉动-能量最优策略优化其运动轨迹,以减小机械手的运动时间、关节脉动和消耗能量。采用改进三次样条曲线连接路径点,保证关节始末速度、加速度可任意指定,在各关节运动约束条件下采用遗传算法对路径点之间的运动时间进行搜索优化。仿真结果表明:优化后的运动轨迹十分平滑,可以避免关节速度、加速度的突然变化,控制振动。与时间最优规化结果对比表明:该优化方法可以有效地减小关节运动的平均速度、加速度和脉动。
排爆机械手;轨迹规划;时间-脉动-能量最优;三次样条曲线
排爆机械手轨迹规划是排爆机器人控制的重要研究内容。机械手轨迹规划主要有笛卡尔空间规划[1-2]和关节空间规划[3-5]。笛卡尔空间规划形象直观,但在机器人控制时需实现快速逆运动学计算,而且不能确保不出现奇点[6];关节空间规划优点在于控制系统直接作用于关节,容易满足设计要求和运动约束,可以避免奇点和关节突变以及冗余机械臂逆运动学带来的计算量[7]。轨迹规划最基本的优化条件为最小执行时间[8-9]、最小能量[10]和最小脉动[11-12],多目标优化方法都是基于以上3种基本优化条件提出的。庞慧[13]针对排爆机械手提出了时间最优轨迹规划,在沿预定路径运动时节省了运动时间,取得了较好效果;张攀峰[14]提出了“6自由度求解,4自由度规划”策略,初步实现了排爆机械手自主抓取。但以上研究仍存在以下问题:1) 传统三次样条插值无法同时保证第1类和第2类初始条件[13];2) 没有考虑机械手运动时的脉动、能量等,所得结果并非最优。
针对排爆机械手最优轨迹规划问题,本文提出了时间-脉动-能量最优轨迹规划方法,机械手关节空间的关键点以改进三次样条曲线连接,保证始末速度、加速度可任意指定,同时采用遗传算法优化关节轨迹,并与时间最优规划的结果进行对比。
1 排爆机械手结构

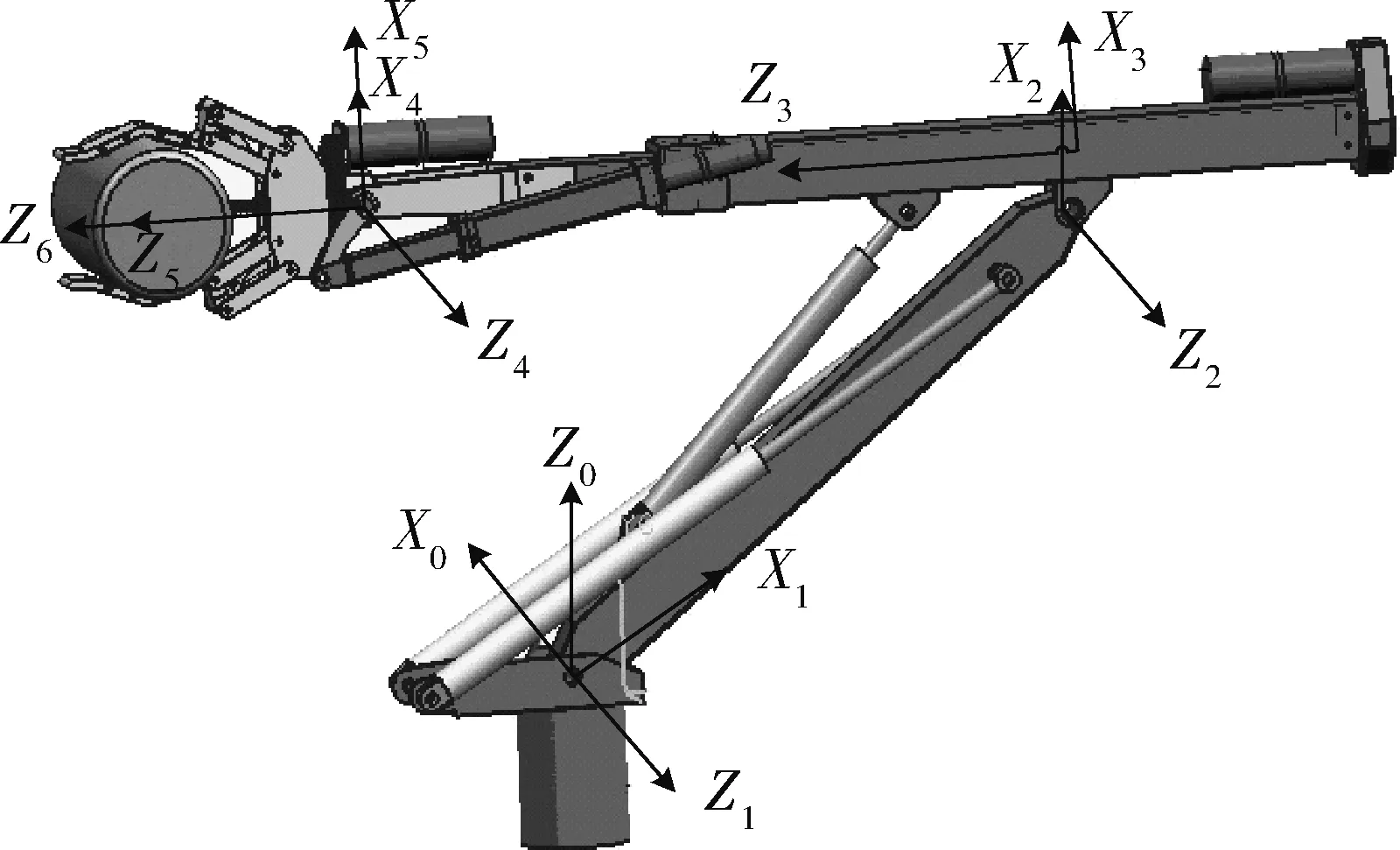
图1 排爆机械手结构
表1 D-H参数
连杆θi/(°)di/mmai/mmαi/(°)0-1θ1(90)00-901-2θ2(-90)0a202-3θ3(0)0a3-903-40d40904-5θ5(0)00-905-6θ6(0)000
注:θi为关节转角;di为关节距离;ai为杆件长度;αi为杆件扭角。
2 轨迹构造及目标函数转化
路径规划产生路径点后,轨迹规划器要根据路径点产生满足关节空间内运动学限制的平滑轨迹。
2.1 时间-脉动-能量优化条件
轨迹规划产生的运动律必须满足关节空间的限制条件,即关节速度、加速度、脉动(加加速度)有界;在满足限制条件的前提下,排爆机械手的运动时间应尽量短,以提高工作效率,即所谓的时间最优;排爆机械手运动时的加速度变化应尽量平滑,以减小末端振动、保证安全,即所谓的脉动最优;排爆机械手作业所消耗的能量应尽量少,以减轻车载电池的消耗,即所谓的能量最优。因此排爆机械手轨迹规划最优目标的数学描述为
(1)

由式(1)可知:时间最优以每段运动时间之和表示;脉动最优以每段脉动平方和表示;能量最优以每段运动加速度平方和表示。在优化求解过程中,增大kT可以缩短关节运动时间,但会导致加速度剧烈变化;增大kJ可以增加关节运动的平滑性,但会延长运动时间;增大kE会使优化结果运动耗费能量减小。因此,kT、kJ和kE三者比例要根据实际需要进行调节。
以下我们以歌曲的音乐停顿为歌词的句式单位,逐句地具体分析《秀才胡同》歌词中所使用的修辞格及其表达作用:
2.2 关节空间连续轨迹构造


(2)


(3)
式中:aj,i(ti)为ti时刻关节j在第i段曲线的加速度。
2个外加虚点处的位移分别为
(4)
(5)
(6)
式中:系数矩阵K为一个非奇异斜对角阵;Bj为已知量qj,i和hi的函数;Aj为所求的关节加速度向量。
aj,i可以由线性方程(6)求得,把aj,i代入式(3)就得到了改进三次样条曲线的表达式。为了应用式(1)对目标函数进行优化,需要把连续约束条件转化为有限离散约束条件,最终得到
(7)

加入归一化参数可以解决权重设置困难的问题,归一化参数为单一目标优化结果,这里分别取N1=100,N2=10-6,N3=10-5。最终,通过对未知量hi寻优,可求得目标函数的近似最优值。
3 基于遗传算法的仿真实验与分析
本文采用遗传算法对轨迹规划目标函数进行寻优,排爆机械手最优轨迹规划具体流程如图2所示。
图2 算法流程
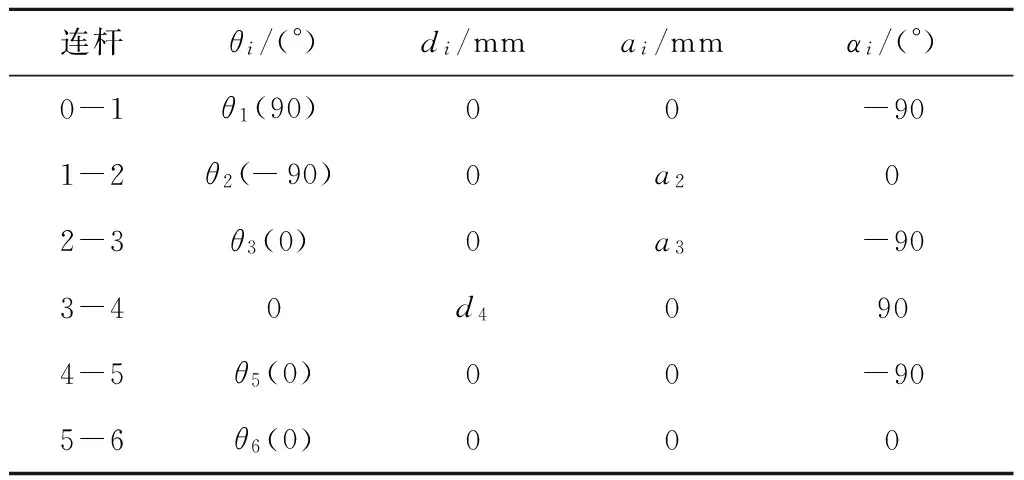
取一条包含5个路径点的工作路径,表2为各路径点处通过逆运动学计算得到的关节值,表3为各关节的运动学约束。设k1=0.3,k2=0.4,k3=0.3;为保证结果的近似最优性和运算效率,遗传算法种群数为200,结束条件为种群最适应值不再减小或者迭代次数大于200;选择算子为随机遍历抽样,交叉算子为单点交叉,变异算子为高斯变异。轨迹规划结果如图3-6所示,分别为6个关节运动时的位移、速度、加速度和脉动,可以看出:6个关节的位移、速度曲线连续平滑,速度、加速度、脉动均在运动约束范围之内,满足驱动器驱动关节运动的条件,结果令人满意。
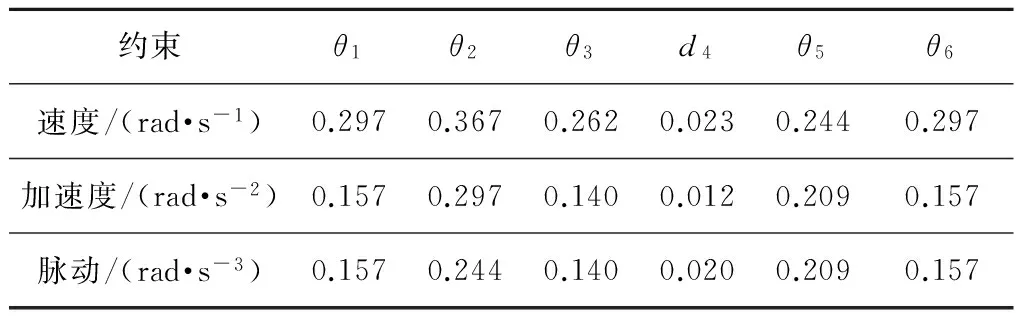
表3 运动学约束
上述轨迹规划结果以时间-脉动-能量最优为目标函数,而文献[13]单纯以时间作为优化条件。通过设置线性约束,令2种方法优化结果的运动时间相同,表4为2种方法运动时间、脉动目标和能量目标对比,结果表明:在机械手运动时间相同的情况下,采用时间-脉动-能量最优所得轨迹的脉动目标、能量目标分别为采用时间最优所得轨迹的14.79%和35.04%。根据文献[4]的研究成果:1)较小的脉动可以减小机械手结构磨损、抑制排爆机械手末端振动,从而提高其工作安全性;2)脉动为加速度的导数,对于脉动较小的机械手运动轨迹,其加速度变化量更小,关节轨迹更加平滑,使得排爆机械手运动更加协调;3)较小的能量目标使排爆机械手作业时消耗能量更少,在车载电源有限的情况下,增加了其作业次数。
图3 关节1-6的位移
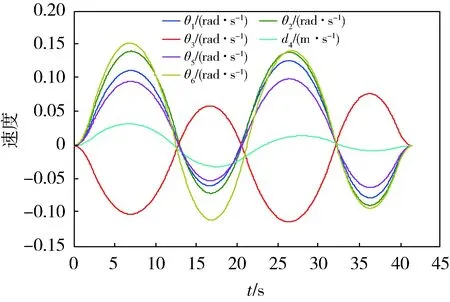
图4 关节1-6的速度
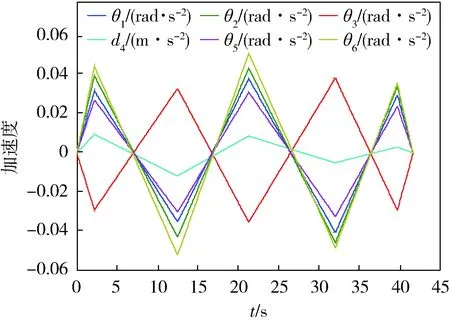
图5 关节1-6的加速度

图6 关节1-6的脉动
表4 2种方法优化结果比较
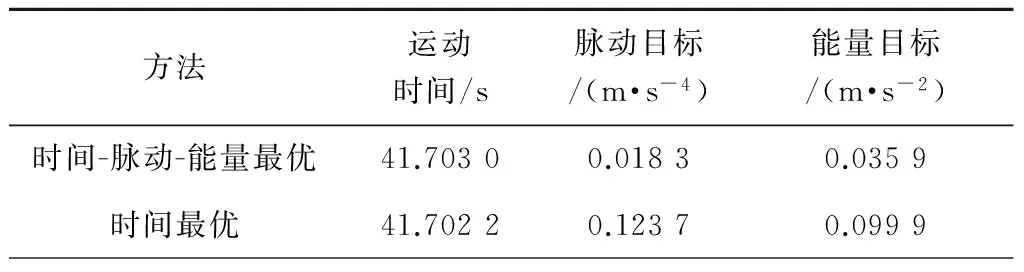
方法运动时间/s脉动目标/(m·s-4)能量目标/(m·s-2)时间-脉动-能量最优41.70300.01830.0359时间最优41.70220.12370.0999
4 结论
本文针对排爆机械手最优轨迹规划问题,提出了一种时间-脉动-能量最优轨迹规划方法。该方法在以下方面具有优势:
1) 以改进三次样条曲线构造排爆机械手关节空间轨迹,可以保证轨迹始末速度、加速度为任意值,更接近工程实际,适用于机械手实时轨迹规划;
2) 脉动、能量目标函数的加入,使得排爆机械手运动轨迹更加平滑,工作安全性和持续性得到了提升;
3) 该方法作为一种通用方法,也可用于其他类型机械手关节空间的最优轨迹规划中。
[1] 陈国梁,王心汉,王敏.机械手圆周运动的轨迹规划与实现[J].华中科技大学学报:自然科学版,2005,33(11):63-66.
[2] 任敬轶,孙汉旭.一种新颖的笛卡尔空间轨迹规划方法[J].机器人,2002,24(3):217-221.
[3] Solteiro Pires E J, Moura Oliveira P B, Tenreiro Machado J A. Manipulator Trajectory Planning Using a MOEA[J]. Applied Soft Computing, 2007(7):659-667.
[4] Gasparetto A, Zanotto V. A Technique for Time-jerk Optimal Planning of Robot Trajectories[J]. Robotics and Computer-integrated Manufacturing, 2008,24(3):415-426.
[5] Rossi C, Savino S. Robot Trajectory Planning by Assigning Positions and Tangential Velocities[J]. Robotics and Computer-integrated Manufacturing,2013,29(1):139-156.
[6] Niku B.机器人学导论分析、控制及应用[M].2版.北京:电子工业出版社,2013:136-137.
[7] Gasparetto A, Zanotto V. Optimal Trajectory Planning for Industrial Robots[J]. Advances in Engineering Software,2010(41):548-556.
[8] Shiller Z, Chang H, Wong V. The Practical Implementation of Time-optimal Control for Robotic Manipulators[J].Robotics & Computer-integreted Manufacturing,1996,12(1):29-39.
[9] Lee Y D, Lee B H, Kim H G. An Evolutionary Approach for Time Optimal Trajectory Planning of a Robotic Manipulator[J].Information Science,1999,113(3/4):245-260.
[10] Oen K T, Wang L C. Optimal Dynamic Trajectory Planning for Linearly Actuated Platform Type Parallel Manipulators Having Task Space Redundant Degree of Freedom[J]. Mechanism and Machine Theory,2007,42(6): 727-750.
[11] Boscariol P, Gasparetto A. Model-based Trajectory Planning for Flexible-link Mechanisms with Bounded Jerk[J]. Robotics and Computer-integrated Manufacturing,2013,29(4):90-99.
[12] Gasparetto A, Zanotto V. A New Method for Smooth Trajectory Planning of Robot Manipulators[J]. Mechanism and Machine Theory,2007,42(4):455-471.
[13] 庞慧.某型机器人工作装置的性能分析及优化[D].天津:河北工业大学,2010.
[14] 张攀峰. 受限智能危险弹药处理机械臂自主抓取关键技术研究[D]. 石家庄: 军械工程学院, 2012.
(责任编辑:尚彩娟)
Optimal Trajectory Planning of Explosive Ordnance Disposal Manipulators Based on Genetic Algorithm
ZHANG Yun-feng1, MA Zhen-shu2, SUN Hua-gang2, LU Ji-shan1
(1. Department of Ammunition Engineering, Ordnance Engineering College,Shijiazhuang 050003, China;2. Troop No. 63908 of PLA, Shijiazhuang 050000, China)
A time-jerk-energy optimal trajectory planning strategy is proposed for the explosive ordnance disposal manipulator to reduce the execution time, jerk and energy of the mechanical arm. Every pair of consecutive via-points are connected through improved cubic spines to ensure the arbitrary initial velocities and accelerations. Genetic algorithm is used to search for the best time interval under the kinematic constraints of joints. The simulation results prove that the technique can keep joint moving smooth and avoid sharp change of velocity and acceleration, and the vibration may be reduced. Compared with the time optimal method, the proposed technology can minish the mean velocity, acceleration and jerk.
explosive ordnance disposal manipulator; trajectory planning; time-jerk-energy optimization; cubic spline
1672-1497(2015)02-0076-05
2014-10-10
张云峰(1990-),男,硕士研究生。
TP241.3
A
10.3969/j.issn.1672-1497.2015.02.015
猜你喜欢
中国设备工程(2022年15期)2022-08-19
中国特种设备安全(2022年3期)2022-07-08
当代水产(2022年6期)2022-06-29
机电工程技术(2021年3期)2021-09-10
电子制作(2019年13期)2020-01-14
环球时报(2019-07-18)2019-07-18
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
舰船科学技术(2015年8期)2015-02-27
