一种基于全局最优MPPT算法的研究
2015-06-10 08:53:22李月芳周皓
电气传动 2015年12期
李月芳,周皓
(1.常州轻工职业技术学院电子电气工程系,江苏 常州213164;2.北京交通大学电气工程学院,北京100044)
实现全局最大功率点跟踪是提高光伏并网发电系统效率的一种非常有效措施[1-2]。同一系统的光伏陈列在相同辐照和温度下,其输出P—U曲线表现为单峰值特性,采用传统的电导增量法(IC)、扰动观测法(P&O)等算法都可实现光伏阵列的最大功率点跟踪[3]。但在实际工程应用中,由于光伏阵列会遇到局部遮挡、老化以及积尘覆盖等原因会导致光伏阵列输出的特性不一致,此时光伏阵列的P—U曲线将表现为多峰值特性[4],传统的单峰值算法将会使系统处于局部峰值点,导致光伏阵列不能持续工作在系统最大输出功率点,减少了系统向电网或负荷注入的电能,从而造成系统的总体发电效率下降[5]。
本文提出一种基于局部扫描法与P&O 相结合的全局最优MPPT 算法,该方法在系统启动后先采用固定大步长进行一次全局扫描来寻找全局最大功率点,当扫描结束后使系统运行于全局最大功率点附近,然后启动变步长P&O算法变步长扫描,找到精确的最大功率点。该方法解决了传统的单峰值算法导致光伏阵列不能持续工作在系统最大输出功率点的问题,能使光伏阵列运行在系统全局最大功率点。
1 局部阴影下的光伏输出特性
图1 为光伏阵列有/无阴影输出特性示意图。本文针对光伏阵列在有/无阴影输出的特性进行研究,假设初始时刻光伏阵列表面无阴影,在运行过程中出现阴影,其输出特性的变化规律为:1)在正常情况下光伏阵列只有1个峰值点,当出现局部阴影后,光伏阵列输出功率将会减小,系统会出现2 个或2 个以上的峰值;2)光伏阵列从无阴影到出现阴影过程中,其输出特性曲线上的全局最大功率点可能向电压减小的方向移动,或仍在原最大功率点对应的电压附近;3)当光伏阵列输出呈现多峰特性时,一般情况下,各个局部峰值点呈阶梯状,即在全局MPP 点左右两边,局部MPP 点逐次减小,距离全局最大功率点越远,局部最大功率点的功率越小。特殊情况下会在2个较大局部峰值点之间存在一个较小峰值点。

图1 光伏阵列有/无阴影输出特性示意图Fig.1 Schematic diagram of PV array with/without shadow output
当光伏阵列出现如图1中所示的局部阴影下多峰输出特性时,传统的MPPT 算法可能会失效。基于以上输出特性规律,本文提出了局部扫描法与P&O相结合的全局最优MPPT算法。
2 全局MPPT算法设计
2.1 系统启动阶段
在系统启动阶段,有2种方案。
1)一般在全局最优MPPT 算法中,默认系统启动时光伏阵列输出为单峰值,故采用传统的MPPT启动,当阴影出现后,再使能全局MPPT算法。但是,系统在实际启动之前无法确定光伏阵列输出处于单峰值还是多峰值状态,所以本方法中系统启动后先进行一次全局扫描来寻找全局最大功率点。由于全局扫描范围较大,为减小功率损失,先采用固定大步长扫描,扫描结束后使系统运行于全局最大功率点附近,然后启动变步长P&O算法变步长扫描,找到较精确的最大功率点。
2)若系统启动时光伏阵列表面无局部阴影,则测量此时的开路电压,并以0.9 倍的开路电压为参考电压,启动变步长P&O 算法,此时无需进行全局MPPT扫描算法。
2.2 稳定运行阶段
变步长P&O 算法:即在传统的P&O 算法上增加变步长算法,具体实施方法就是每改变一次搜索方向,步长变为原步长的一半,该方法可以减小在最大功率点附近震荡带来的能量损失。
系统启动后,根据此时的扰动步长可以判定系统是否处于稳定阶段,当扰动步长足够小时,认为系统已稳定运行在全局最大功率点上。
当系统稳定运行后,使能光伏阵列阴影判断功能,此时设定阈值ΔP0。另外,令ΔP=P(t)-P(t-1),其中P(t)和P(t-1)分别为当前功率值和上一次功率值,考虑到系统的响应时间及振荡,故设P(t)和P(t-1)为某一时间段内功率的平均值。若光伏阵列输出功率不发生突变,即时认为光伏阵列无阴影,则继续执行P&O 算法;否则认为光伏阵列有阴影,需要启动局部扫描法。
2.3 变步长的P&O算法
1)功率平均值的计算。在P&O 算法执行过程中,系统处于稳态,则无需进行频繁的扰动,选取扰动时间间隔为500 ms,而功率计算平均值的时间则为500 ms中后半200 ms。
2)ΔP0的取值。因为P&O 算法是在不停地进行扰动,当无局部阴影发生时,采用变步长P&O 算法产生功率差值很小;在无阴影条件下,光伏阵列工作在全局最大功率点处时,扰动步长为ΔU,扰动带来的功率变化ΔP 与ΔU、最大功率点处电流成比例关系。因此设定ΔPmax=k·ΔU·Imax,其中k 为系数,为防止太容易进入局部阴影扫描,故选取ΔU的最大值。当局部阴影发生时,若对光伏阵列输出功率产生的影响比较小时,也无需启动局部扫描算法,以避免扫描过程中带来的功率损失。
因出现局部阴影后,光伏阵列输出功率变小,最大功率点保持在原工作电压点附近或向电压减小的方向移动,故进入局部扫描算法后,从当前工作电压点处向电压减小的方向扫描,并将当前工作点的功率、电压分别记作Pmax,UPmax。由于扫描范围较大,故扫描的固定步长可以略大于P&O 算法中的最大步长。系统不断向电压减小的方向进行扫描,直到出现新的峰值,若新峰值的功率值大于Pmax,则更新UPmax的值,继续向电压增大的方向进行扫描,若新峰值的功率值小于Pmax,则停止扫描。另外,若搜索到扫描范围的电压下限值Umin,也停止扫描。局部扫描过程不宜太长,故在系统稳定的前提下,减小扰动时间间隔,相应计算P(t)和P(t-1)的平均值时间的减小,扰动时间间隔取为300 ms以内。
3 仿真和实验结果
本文搭建了基于Matlab/Simulink 的仿真模型,对全局最优MPPT算法进行了仿真验证。
3.1 基于Matlab的仿真模型
图2为光伏阵列仿真模块。光伏阵列的开路电压、短路电流、最大功率点电压、电流,以及温度、光照强度和每个组件中被遮挡的光伏阵列个数具体见图中给定的参数。其中2个阶跃信号表示光伏阵列第2 块组件与第3 块组件在1 s 时突然出现阴影,这样导致光伏阵列输出特性出现多峰现象。PV_3_531模块为S-Function模块,可根据输入条件与当前工作电压,得到光伏阵列对应的输出电流值。其中,用Boost 电路控制光伏阵列的输出电压,寻找光伏阵列的全局最大功率点。Boost 电路的输入端接光伏阵列,输出端接直流电压源,作为稳定的母线电压。

图2 光伏阵列仿真模块Fig.2 PV array simulation module
3.2 Matlab仿真结果
1)仿真条件。在光照度为1 000 W/m2时系统启动,输出单峰特性曲线。在1 s时第2个与第3个组件都有4个阵列出现阴影。因为6 kW逆变器的MPPT 最低电压为200 V,最高电压为500 V,故设置P—V曲线的扫描范围为220~480 V。
2)仿真过程。①系统启动后从0.9倍的开路电压处开始进行P&O 算法,算法初始步长为20 V,寻找最大功率点并保存;②当P&O 算法的步长足够小时,认为光伏阵列已稳定运行于最大功率点,启动功率判断功能,在功率发生突变时执行步长为20 V的局部扫描法,寻找全局最大功率点并保存,若功率没有发生突变,继续执行P&O算法;③在1 s 功率发生突变,启动局部扫描法;④启动局部扫描法扰动结束后,参考电压给定为全局最大功率点处电压,执行P&O 算法,算法初始步长为20 V;⑤返回步骤③。
3)仿真结果。图3 为仿真过程中,全局最优MPPT算法给定的参考电压变化过程。正常情况时,光伏阵列输出特性如曲线①所示,系统运行于最大功率点O。曲线②为出现局部阴影时的光伏输出特性。

图3 全局最优MPPT算法给定的参考电压变化过程Fig.3 Change process of the reference voltage for global optimal MPPT algorithm
图4 、图5分别为全局最优MPPT算法过程中光伏阵列输出电压、功率变化仿真波形图。
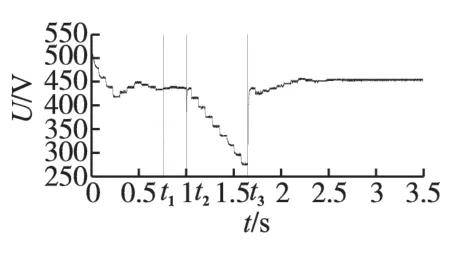
图4 光伏阵列输出电压变化图Fig.4 PV array output voltage variation chart
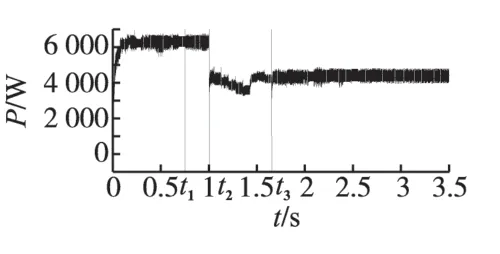
图5 光伏阵列输出功率变化图Fig.5 PV array output power variation chart
系统启动后开始进行P&O 算法,经过t1时间,系统扫描到最大功率点O,此时输出功率大约为6.2 kW。t2=1 s 时出现局部阴影,光伏阵列输出电压不变,电流减小,输出功率降为4.4 kW 左右,光伏阵列工作于A点。随后启动局部扫描法,将A点记为功率最大点Pmax,并从A点开始向电压减小的方向进行扰动扫描。扫描到局部功率最大B点后,由于B点功率小于A点,继续向电压减小的方向扫描,但由于B 点左边没有功率减小的局部峰值点,故需扫描到MPPT 的电压下限Umin处时停止扫描,然后回到记录中的最大功率点A后附近扫描,由于C点功率为4.42 kW,并且右边没有功率减小的局部峰值点,t3时刻将C 点的电压作为参考电压,启动P&O 算法,使光伏阵列工作在C 点左右,等待下次功率突变的发生。此时光伏阵列输出最大功率为4.42 kW。至此,此种全局最优MPPT 算法已完成,其工作点依次为O→A→B→A→C。
3.3 实验装置及结果
为验证本文的算法,搭建了功率为6 kW 的单相光伏并网逆变器,图6 为用毛毯遮住部分电池组件。装置的主要参数为:PV输入功率6 kW,升压电感0.22 mH,Boost IGBT型号IKW40N65H5,Boost 二极管型号APT30DQ120BG,母线DC-link 315 V/1 000 μF。

图6 测试电池板Fig.6 The test panels
图7 、图8分别为全局最优MPPT算法过程中光伏阵列输出电压、功率变化实际瞬态波形图。
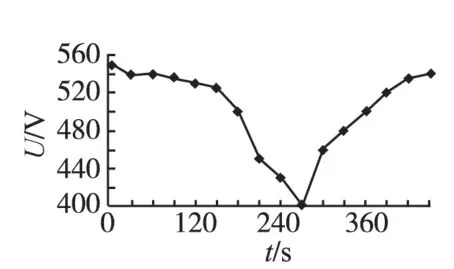
图7 光伏阵列输出电压图Fig.7 PV array output voltage chart
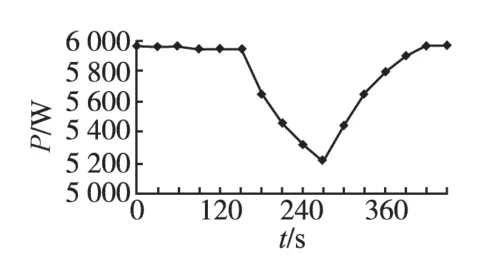
图8 光伏阵列输出功率图Fig.8 PV array output power chart
图7 和图8 是系统开始无阴影时工作电压、输出功率分别约520 V,6 000 W,在150 s 时用毛毯遮住部分电池组件,在270 s 时移去毛毯后系统电压、功率的动态变化波形。从图中可以看出:在出现阴影的情况下,系统立即对光伏输出特性曲线不断的扫描,当扫描结束后使系统运行于全局最大功率点附近,这样减少系统能量的损失,与仿真及理论分析相符。
图9为光伏模拟器模拟当光伏组件有2个峰值时光伏阵列全局最大输出功率点时波形图。
从图9 可以看出,当系统存在2 个局部最大功率点时,通过本文提出的算法能很快找到全局最大功率点,如图9中圆点所示。通过同样的方法,当系统存在2个及2个以上的局部最大功率点时也能通过比较找到全局最大功率点。

图9 有2个峰值时光伏阵列全局最大输出功率图Fig.9 GMPPT of two local maximum output power peak
4 结论
本文提出一种新的基于局部扫描法与P&O相结合的全局最优MPPT 算法,通过仿真与实验说明了采用全局最优MPPT 算法的过程,该算法有以下优点:
1)相较于全局MPPT 扫描算法,此算法扫描范围较小,减少了扫描过程中功率的损失;
2)此算法避免了短路电流的在线测量,而开路电压值也只需在开机前读取即可;
3)结合传统的P&O算法,不需要在无阴影的情况下对光伏输出特性曲线不断的扫描,从而减少了功率损失,同时有利于系统的稳定运行。
[1] Kjaer S B.Evaluation of the Hill Climbing and the Incremental Conductance Maximum Power Point Trackers for Photovoltaic Power Systems[J].IEEE Transactions on Energy Conversion,2012,27(4):922-929.
[2] Ji Y H,Jung D Y,Kim J G,et al.A Real Maximum Power Point Tracking Method for Mismatching Compensation in PV Array Under Partially Shaded Conditions[J].IEEE Transactions on Power Electronics,2011,26(4):1001-1009.
[3] 张兴,曹仁贤.太阳能光伏并网发电及其逆变控制[M].北京:机械工业出版社,2011.
[4] Hiren Patel,Vivek Agarwal.Maximum Power Point Tracking Scheme for PV Systems Operating Under Partially Shaded Conditions[J].IEEE Transactions on Industrial Electronics,2008,55(4):1689-1698.
[5] Maki A,Valkealahti S.Power Losses in Long String and Parallel-connected Short Strings of Series-connected Silicon-based Photovoltaic Modules Due to Partial Shading Conditions[J].IEEE Transactions on Energy Conversion,2012,27(1):173-183.
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
文苑(2020年11期)2020-11-19 11:45:11
中国诗歌(2019年6期)2019-11-15 00:26:47
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
数学大王·中高年级(2016年4期)2016-05-14 12:56:02
电测与仪表(2016年24期)2016-04-12 00:21:06
中国光学(2015年5期)2015-12-09 09:00:42
电测与仪表(2015年20期)2015-04-09 11:53:54
河北科技大学学报(2015年5期)2015-03-11 16:16:37
电测与仪表(2014年2期)2014-04-04 09:04:00