7000 m井架起升工况分析*
2015-06-09 15:00:07杨静
机械研究与应用 2015年5期
杨 静
(兰石石油装备工程有限公司,甘肃兰州 730314)
7000 m井架起升工况分析*
杨 静
(兰石石油装备工程有限公司,甘肃兰州 730314)
针对7 000 m钻机井架起升过程,在PTC Mathcad Prime平台上,建立了起升过程的数学模型。得到了整个起升过程中的拉力分布情况及各临界角度,为结构设计提供了理论依据。为类似钻机的起升计算创造了便利条件。
井架起升;PTC Mathcad Prime;数学模型;参数化
0 引 言
目前对井架底座起升的计算最普遍的方法是:把井架的起升分为不同角度的静态工况计算[1-3],既给定一个或多个起升角,通过求解静平衡方程得到该角度的起升力。若要求得到整个起升过程的受力情况,则需要取若干角度分别算一次,然后以插值方式求的结果。由于测量误差、制图误差以及插值运算的误差累积导致该方法的结果误差偏大。因此,笔者想到了利用PTC Mathcad Prime建立起升过程的数学模型。
1 结构简介
ZJ70DZ钻机结构主要由顺穿天车,п型井架[4]以及平行四边形底座等部件组成。井架、底座采用低位安装,井架和底座分别起升。主要优点是井架的大腿和人字架的腿落在底座上与平行四边形整体起升式底座使用同一根起升钢丝绳,起升完井架后,不用换绳,继续把底座起升到位。
两根起升大绳分别从左右上座引出,绕过人字架导向滑轮后,再经过井架上两个导向滑轮最后通过平衡器连接。起升井架时,底座顶层与底层通过销子连接牢固,使用钻机主绞车动力拉动游车,带动起升大绳,起升井架。井架到位后用U形螺栓与人字架固定。同时打掉底座顶层与底层的连接销;继续提升游车,利用平行四边形原理把顶层起升到位。
2 基准坐标系及各参数输入
以井架大腿销中心连线为Z轴;井架倒伏方向为X轴正方向;垂直地面向上为Y轴正方向;井架大腿销连线中点为坐标原点。如图1所示。
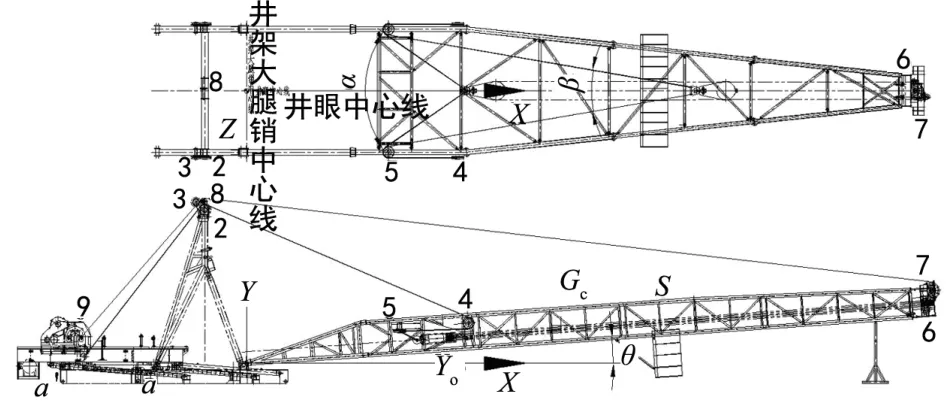
图1 基准坐标系示意图
鉴于井架、底座一般在站立状态下进行设计,各点坐标均取该状态下的坐标,可得表1。
井架起升过程中:Mark 1、2、3、8、9都是非动点,因此把这些点提出来作为矩阵A;Mark 4、5、6、7、Gc是动点,把这些点提出来作为矩阵B;Mark a、a′提出来作为矩阵C。
以下参数只列出参数名称而不提供参数具体值:井架起升重量:Gc;起升大绳长度:Ls;平衡器宽度: D1;游车重量:Gy;游车重心到平衡器距离:D2;游车滑轮中心到平衡器距离:D3;钻井绳线密度:ρ;起升大绳初始夹角:ρ;井架起升初始角:st;井架起升终止角:ed;钻台面初始高度:ls;钻台面最终高度:le;动载系数:k[5]。
井架及底座均为低位安装。井架起升时,底座顶层通过销子与底层连接牢固。因此“销点”及“滚筒中心”坐标需经如下转换:
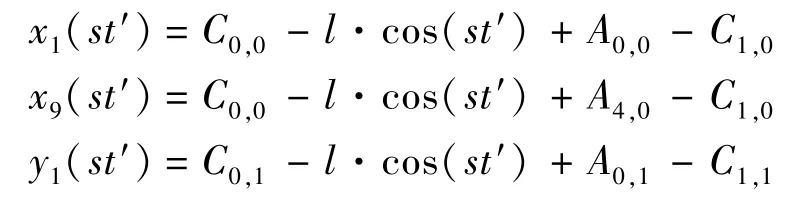


表1 坐标参数汇总表
注:d为滑轮直径,值为空表明该点不是滑轮。井架重心统计过程中不包含游车及钻井绳系。
3 起升过程分析
3.1 各动点坐标与起升角的关系
整个起升过程中,井架在XY平面内绕坐标原点做圆周运动。则其上各点的轨迹可以由以下方程表示:
3.2 数学模型的建立
在起升过程中,起升大绳从销点到井架间的连接有三种情况:
①起升大绳从销点出发,经定滑轮1(Mark2)连接到井架动滑轮1(Mark4)。
② 起升大绳经销点,连接到井架动滑轮 1 (Mark4)。
③起升大绳从销点出发,经定滑轮2(Mark3)连接到井架动滑轮1(Mark4)。
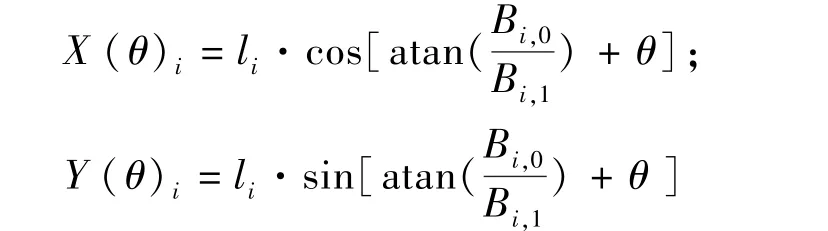
由各点之间的几何关系,带入动点坐标函数可写出各个滑轮、销点之间的公切线方程及其公切线线段长与起升角θ之间的关系。
3.2.1 各绳斜率及绳长
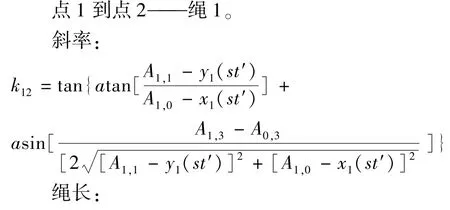

式中:kij、kij(θ)为Mark“i”与Mark“j”之间的绳子的斜率;Lij、Lij(θ)为Mark“i”与Mark“j”之间的绳子的长度,mm;Li、Li(θ)为Mark“i”的绕绳长度,mm。
点2到点4——绳2


令直线方程为:k24(θ)·x-y+b24(θ)=0
由定滑轮重心离绳2距离等于半径得:
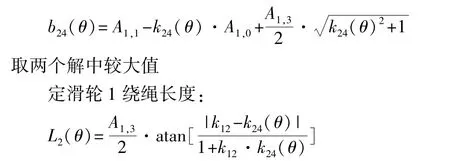
类似的,可以得到其他各段的表达式,本文不做罗列。
3.2.2 起升大绳从销点到井架间的连接的三种情况
其临界点分别为:

3.2.3 动滑轮2到平衡器
此时,应在平衡器所在平面进行求解。
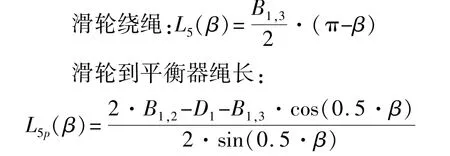
式中:β为起升大绳夹角,(°)。
3.2.4 快绳斜率
本节介绍隐私保护的垂直划分Skyline查询协议(PPVPS),该协议能实现垂直划分数据集上的安全Skyline查询。
对于快绳,考虑定滑轮3(Mark”8”)的缠绳情况。
临界点为:k78(θ)与k89相等:θ3=root[k78(θ)-k89,θ,st,ed]
可以用分段函数的型式写出快绳的斜率:
3.2.5 起升大绳长度
同样的,也可以写出起升大绳长度的表达式L (θ,β)。
把θ=st,β=α代入上式就能得到单根起升大绳最短长度:Lm=L(st,α)
由β(θ)可以得到平衡器相对于动滑轮2(Mark”5”)的位置:
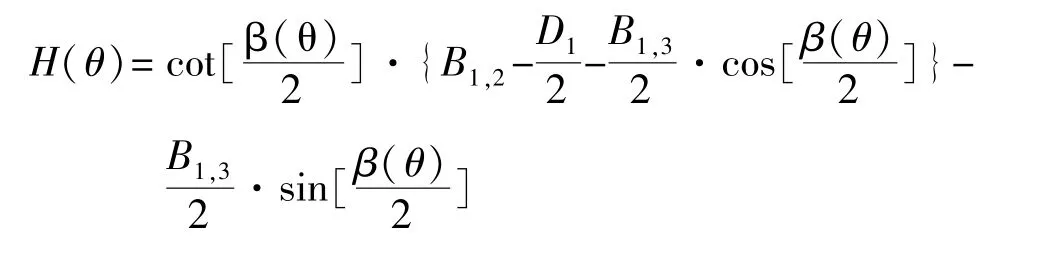
可得到整个起升过程中的游车行程: ΔH=H(ed)-H(st)
4 起升载荷
4.1 游车重心


4.2 钻井绳重量及重心
4.3 起升力矩

5 井架起升结论
(1)单根起升大绳最短长度:Lm=54.472 m,井架配备起升大绳长度为54.5 m符合要求。
(2)人字架主导向滑轮脱绳角:θ1=80.315°,θ2=81.426°。
(3)人字架大梁滑轮(快绳导向滑轮)脱绳角:θ3=58.065°。
(4)井架起放临界点:θ2=81.426°。。
(5)井架起升过程游车行程:ΔH=19.23 m。
(6)起升大绳最大拉力点:θd=4°,
对应大绳拉力:Fd=1 036.226 kN。
(7)起升最大钩载点:θg=6.575°,对应最大钩载:Fg=1 730.716 kN。
(8)井架起升钩载、大绳拉力与起升角θ的关系,如图2所示。

图2 起升力变化图
6 结论分析、建议
从图2起升力变化图中可看出:①起升大绳拉力和起升钩载的变化并不是同步的,究其原因,是起升大绳夹角(β)持续减小,并且其变化速率也在不断减小。而通常起升计算中并未考虑β角的变化,因此得到的结果是不准确的;②起升钩载的变化是先增加,再减小,其原因是游车位置的变化。游车实际运动轨迹如图3所示。
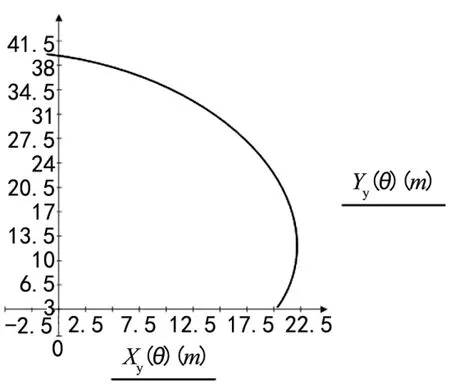
图3 游车轨迹图
可以看出:游车对原点的力臂(x坐标值)有明显增加的过程。因此,通常计算中忽略游车位置影响的做法是有缺陷的。笔者利用PTC Mathcad Prime的特性不仅把通常起升计算中难以考虑的起升大绳夹角变化纳入考虑范围,而且考虑了游车及钻井绳系的影响。更精确的给出了起升过程中各种状态的分界点。对现场操作更具备指导意义。
[1] 孙雪梅.四腿落地式K型井架及其底座的力学行为分析[D].大庆:大庆石油学院,2006.
[2] 王路林,高学仕,王佐祥.井架起升过程的有限元仿真分析[J].石油矿场机械,2006,35(2):20-22.
[3] 张学军,陈孝珍.ZJ70型钻机井架起升过程有限元仿真分析[J].石油矿场机械,2008,37(12):35-38.
[4] 张玉英,钉旭庄.п型井架的优点及推广[J].石油矿场机械, 2010,30(增刊):118.
[5] 陈如恒.钻机起升动力学研究[J].石油矿场机械,1982,11(3): 1-11.
Performance Analysis on the 7 000 m Mast Raising
YANG Jing
(LS Petroleum Equipment Engineering Co.,Ltd,Lanzhou Gansu 730314,China)
In this paper,the mathematical model of the lifting process on PTC Mathcad Prime platform for the 7000m derrick of drilling machine is established,the tension distribution and the critical angle in the whole lifting process are obtained,so as to provide a theoretical basis for the structural design.That could create favorable calculation for the subsequent similar rig raising.
mast raising;PTC Mathcad Prime;mathematical model;parameterization
TE923
A
1007-4414(2015)05-0035-04
10.16576/j.cnki.1007-4414.2015.05.012
2015-08-07
杨 静(1986-),男,重庆江津人,助理工程师,主要从事石油钻井设备的设计和计算机仿真方面的工作。
猜你喜欢
新少年(2023年10期)2023-10-24 07:47:44
机床与液压(2022年16期)2022-09-19 07:03:24
初中生学习指导·提升版(2020年5期)2020-09-10 07:22:44
莫愁·小作家(2020年4期)2020-04-05 18:48:00
决策探索(2019年19期)2019-10-21 09:16:32
物理通报(2019年7期)2019-06-29 07:32:56
设备管理与维修(2019年2期)2019-02-22 00:54:58
物理通报(2018年9期)2018-08-31 07:45:58
作文与考试·小学高年级版(2017年17期)2017-09-08 08:09:36
化工管理(2017年5期)2017-04-11 03:37:55