
基于超声导波的水下管道缺陷检测
2015-06-08 09:58张红梅
电子设计工程 2015年16期
范 忠,张红梅
(台州职业技术学院 机电工程学院,浙江 台州 318000)
水下管道和海上竖管是海上石油和天然气生产的基础设施。由周围海水和管道内容物造成的管道腐蚀是最严重的问题之一。为了保证这些管道的安全,亟需合适的技术来定期检查海上管道的完整性。
由潜水员和水下机器人(ROV)进行的水下管道检查非常传统[1],但仍然十分有用。虽然人眼的识别、理解和分析能力十分重要,但是不能检查管道内部的缺陷,这需要一定的经验。磁粉检测技术已经广泛应用于检测水下管道的表面断裂[2]。然而,这项技术需要由潜水员实施,并且需要清理检查区域。漏磁法被用于在线检查,但是不能识别管壁厚度的渐变。超声检测是另外一种管道缺陷识别方法。这种方法适用于管壁厚度测量、焊缝检查和内容物及内部腐蚀检测。但是超声检测法也要由潜水员实施,而且由于检测时间较长,经济性较差。除了超声波检测,使用在线检查设备来测量管道的各种特征量也在管道行业获得了持续的认可[3]。这些设备用来为管道运营商提供信息,例如管道缺陷的类型和位置。在线设备自行携带电池、录音机和里程表,因此,这些设备的广泛应用常常由于海上管道的各种状况而遇到挑战。
超声导波技术是一种用于管道检查的无损检测(NDE)方法,因为它具备传播距离长、省时和成本低等优点,使得这项技术极具吸引力。几十年来,很多学者都研究了导波测试技术和其在管道检查领域的应用[4]。导波检查系统由以下核心部件构成:用于激励和接收导波的传感器阵列;用于把这些传感器夹在管道上的固定装置。有很多种具有应用前景的传感器技术,用于在管道中激发导波[5]。但是,在之前的技术中,现存的固定装置不具备灵活性,这也就意味着不同直径的管道检查需要不同尺寸的固定装置,这增加了检查系统的成本。
在这项研究中,设计并制造了可拆式传感器系统,产生超声导波来检验水下管道的安全性。首先,对导波在水下管道上的传播特性进行了理论分析,来为水下管道检查选择合适的导波类型;然后,生产和安装了包括传感器和固定装置的传感器系统。为了验证现有传感器的性能,进行了一系列的测试。最后,讨论了实验结果。
1 频散特性和模式选择
1.1 理论背景
Gazis给出了各向同性圆管上的波传播频率方程的详细推导。圆管有无限多个传播模式,这些模式都是频散的。这些模式叫做纵向模式(L(0,M))、扭转模式(T(0,M))和挠曲模式(F(n,m)),n是周向阶数,M 是模式数。 导波传播特性被研究了很多年,包括中空的各向同性管道、充满液体的管道和浸入液体的真空管道[4]。下面简要回顾一下与此相关的研究。
如图1所示一个无限长的充满并浸入液体的管道。内径和外径分别为a和b。如果这是一个各向同性的弹性体,纵向轴对称自由振动位移可以由势能分解所得到,即:


图1 一个无限长的充满并浸入液体的管道Fig.1 An infinite liquid-filled pipe surrounded by the liquid
其中,ur和 uz分别是径向和轴向位移分量,Jn(x)和 Yn(x)分别是第一种和第二种阶数n的巴塞尔(Bessel)函数。
管道内和管道外液体的纵向轴对称振动位移分量是:

管道外液体的振动位移分量可以重新写成:

等式(1)~(6)中的常数 A1,A2,B1,B2,C1 和 D1 是由管道的侧向边界条件决定的。考虑以下两种情况:
1)浸入液体的真空管道:

2)浸入并充满液体的管道:

其中,σrrσrz是管道上的应力分量,和是液体中的应力分量。为方程(7)或(8)得到了齐次方程组的6个常量A1,A2,B1,B2,C1和 D1。 方程组有解的充要条件是方程组系数行列式的值是零,这导出了导波的频散方程。
1.2 频散曲线
如图2和图3所示分别表示充满并侵入无限水中的管道上传播导波的纵向和扭转模式相速度和群速度频散曲线。
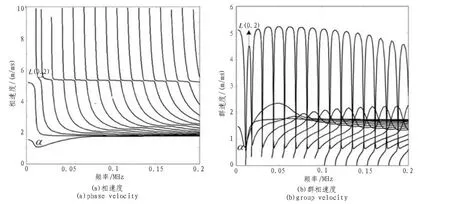
图2 充满并侵入水中的管道上传播导波的纵向模式频散曲线Fig.2 Dispersion curves of longitudinal mode corresponding to the guided waves propagating in the water-filled pipe surrounded by the water
与在真空中的真空管道上导波的频散特性相比,有以下几点不同:1)水下管道上的导波比真空管道上相同频段的导波包括更多的模式,这就增加了激励单一、纯粹模式导波的难度;2)管道与其中液体的相互作用产生了水下管道上L(0,m)模式的导波,这一模式也可由真空管道上导波的“分裂”而获得,这也意味着导波频散特性更加严重;3)在低频产生了一个新的模式,这一模式由水和管道的相互作用产生,记做α模式。Aristégui等人通过测量波速验证了这个模式的存在。关于α模式传播特性的更多资料可以参见参考资料[6]。对于T(0,1)模式,如图3所示,管道中的水对频散特性几乎没有影响。
1.3 模式选择

图3 充满并侵入水中的管道上传播导波的扭转模式频散曲线Fig.3 Dispersion curves of torsional longitudinal mode corresponding to the guided waves propagating in the water-filled pipe surrounded by the water
为了简化无损检测中对接收信号的解析,非常需要激励一个单一模式的波。事实上,在长距离检测中,激励一个无频散频段的模式是至关重要的,否则,随着在结构上的传播,波包的形状将会发生变化,信号的峰值也会朝着噪声基底衰减。 在所有的导波模式里,L(0,2)和 T(0,1)是实际管道检测中最具吸引力的模式,因为:1)在宽频带上无频散;2)容易激励纯粹的形式,并不产生任何弹性波;3)由于位移和应变在管道壁厚度方向上是几乎一致的,所以对于内表面和外表面上的缺陷是同样敏感的。
然而,如图 2(b)所示,水下管道上的 L(0,2)模式高度频散。也就是说,很难在水下管道上激励单一的L(0,2)模式的导波。而且,L(0,2)模式在壁厚方向上存在径向位移。径向位移可以从管道上带走能量,导致导波能量的损失,进而缩短传播距离。对于T(0,1)模式,如图3所示,管道中的水对频散特性几乎没有影响[6]。此外,由于液体不能承载剪切波,对于仅由剪切位移构成的T(0,1)模式,是没有能量泄露到液体中的。根据以上分析,T(0,1)是用于水下管道检查最具吸引力的模式,本项工作将着重研究这一模式。
2 传感器阵列制造和安装
2.1 传感器制造
T(0,1)模式导波是轴对称的。它只存在周向位移分量,轴向和径向位移分量是零。因此,激励T(0,1)模式的导波要求传感器阵列能够在管道上加载轴对称剪切载荷。剪切振动模式是压电陶瓷振动模式之一。对于厚度剪切压电陶瓷振子,应力应变关系如下:


图4 厚度剪切模式压电陶瓷振子Fig.4 Thickness shear mode piezoelectric ceramic vibrator
如公式(9)所示,振子在激励状态下,仅存在剪应力T5和剪应变S5。因此,传感器利用厚度剪切模式压电陶瓷作为敏感元件。考虑到厚度剪切振子的生产工艺、在管道上的布局和传感器尺寸等因素,振子通常的尺寸为长12.5 mm、宽3.5 mm和厚0.8 mm,极化方向沿宽度方向。厚度剪切振子的电极、极化方向、坐标系和剪切振动如图4所示。当振子长度沿管道轴向时,顶部和底部将沿着相反的方向振动,继而,管道将发生周向剪切位移,并产生扭转模式。
振子是非常脆的,不能简单地压在管道上,所以下一步工作要把振子装在一个实用、安装简单并且可拆卸的传感器里。如图5所示意性地说明了传感器的构造。传感器由压电元件、阻尼层、保护层、RF界面、钢壳和必要的电线组成。阻尼层的作用是增加组件抗弯刚度,阻尼层的材料是加钨环氧树脂,这种材料被广泛应用于传统超声传感器的高阻尼背垫。保护层的材料是氧化铝陶瓷,这种材料可以保护压电元件,使其抗磨损,而且厚度和压电元件相等。
2.2 固定装置设计

图5 传感器结构示意图Fig.5 Schematic of transducer structure
设计固定装置的目的是开发一种易于生产和安装,并且适用于不同直径管道的可拆式传感器阵列。为了达到这一目标,设计了一种新型传感器固定装置。这个固定装置包括若干个用于传感器安装和定位的可拆式模块。两个模块由销轴相互连接,这样,多个模块彼此连接就形成了一个类似于链状结构的环状传感器阵列。每个模块包括两个传感器,距离是一个T(0,1)模式波长的四分之一。通过增加或减少模块的数量,可以用于不同直径管道的检查。
3 实验设置和结果
用于水下管道检查的实验系统包括具备防水功能的传感器阵列和自动收发开关,这个开关的功能是在系统的发射和接收模式之间自动切换,不需要用到继电器、功放和IPC,其中,IPC包括任意波形发生器和PCI总线的数据采集卡。波形发生器触发一个5周期、30.5 kHz的激励信号,并由汉宁(Hanning)函数修改。接着,通过自动收发开关,激励信号被送往数据采集卡和功率放大器。功率放大器把经过放大的信号发送给传感器,这时信号的峰间电压达到了约200 V。然后,传感器激发了T(0,1)模式的导波。当信号被缺陷或管道端头反射回来时,同样的传感器接收了反射信号。信号通过前级放大器被输入到数据采集板上,前级放大器的增益通常被设置为20 dB。检查系统的电源由UPS提供。
实验程序分为空中和水中两个阶段。在一个长3.3 m、外径102 mm、壁厚6 mm的钢管上,加工出两处尺寸完全不同的周向缺陷,分别距离安装在管道端头的传感器阵列1.9 m和2.9 m。这两处缺陷部分减小了壁厚,横截面积分别为壁厚的6.3%和4.7%。
如图6(a)和(b)所示分别表示管道在空中和在5 m深的水中时,经过30.5 kHz的T(0,1)模式数字滤波后的检测信号。如图6所示,信号明显被缺陷反射,人为缺口的回波信号与缺口的尺寸和位置具有良好的相关性。管道在水中与在空中的测试结果几乎相同,这意味着水并没有影响T(0,1)模式导波的传播特性。实验结果与理论分析一致。如果能减小跟踪开始时的混响,就能提高整体的信噪比。接着,管道被下沉到另外一个深度。结果大体上没有受到水深的影响。对于每个深度,管道端头的回波被用作参照,与缺陷反射信号的幅值进行对比。结果表明,深度增加对缺陷和管道端头反射信号的比值几乎没有影响。

图6 用30.5 kHz的T(0,1)模式检测信号Fig.6 Detection signals using 30.5 kHz T(0,1)mode
4 结 论
在这项研究中,为检测水下管道的腐蚀缺陷,设计并制造了利用超声导波的可拆式传感器系统。通过对水下管道上导波传播特性进行理论分析,选取了T(0,1)模式的导波用作水下管道检查。对于实验研究,设计了一种新型可拆式传感器阵列。传感器利用在宽度方向上极化的厚度剪切模式压电陶瓷作为敏感元件。固定装置包括若干由销轴连接的可拆式模块,多个模块相互连接就形成了一个类似于链状结构的传感器阵列环。实验结果表明,传感器系统能够在水下管道上有效地激励和接收T(0,1)模式导波,并且,人为缺口的回波信号与缺口的尺寸和位置具有良好的相关性。对于空中测试和水中测试,缺陷检测和定位结果并没有显著的差别。水深对测试结果也没有影响。
[1]Goldberg L.Diversity in Underwater Inspection[J].Materials Evaluation,1996,54(3):401-403.
[2]Mandal K,Dufour D,Krause T,et al.Investigations of magnetic flux leakage and magnetic barkhausen voise signal from pipe steel[J].J.Phys,1997,30(6):962-973.
[3]Crump H M,Papenfuss S.Use of magnetic flux leakage inspection pigs for hard spot detection and repair[J].Materials Performance,1991,30(6):26-28.
[4]Sinha B K,Plona T J,Kostek S,et al.Axisymmetric wave propagation in fluid-loaded sylindrical shells.I:Theory[J],J.Acoust.Soc.Am,1992,92(2):1132-1143.
[5]Lowe M J S,Alleyne D N,Cawley P.Defect detection in pipes using guided waves[J].Ultrasonics,1998,36:147-154.
[6]Demma A,Cawley P,Lowe M,et al.The reflection of fundamental torsional mode from cracks and notches in pipes[J].J.Acoust.Soc.Am.,2003,114(2):611-625.
猜你喜欢
现代仪器与医疗(2021年2期)2021-07-21
电子制作(2019年9期)2019-05-30
中国交通信息化(2017年10期)2017-06-06
电测与仪表(2016年18期)2016-04-11
中国医学装备(2015年10期)2015-12-29
汽车文摘(2015年11期)2015-12-14
浙江大学学报(工学版)(2015年1期)2015-03-01
物理实验(2015年10期)2015-02-28
振动、测试与诊断(2014年4期)2014-03-01
自动化博览(2014年12期)2014-02-28
