机器人辅助与传统腹腔镜行肝切除术效果比较的Meta分析
2015-06-07 10:37:33兰天马魏杰喻满成吴龙王海涛常磊唐胜利袁玉峰
腹部外科 2015年2期
兰天 马魏杰 喻满成 吴龙 王海涛 常磊 唐胜利 袁玉峰
机器人辅助与传统腹腔镜行肝切除术效果比较的Meta分析
兰天 马魏杰 喻满成 吴龙 王海涛 常磊 唐胜利 袁玉峰
目的 通过系统评价,比较机器人辅助与传统腹腔镜肝切除术治疗肝脏肿瘤的效果。方法 计算机检索PubMed、Elsevier、Springer、Cochrane图书馆、CNKI、重庆维普和万方数据库,收集手术机器人与腹腔镜行肝脏切除术的随机或非随机对照研究,由两名研究者根据纳入与排除标准进行筛选文献、提取资料并评价质量后,采用RevMan5.3软件进行Meta分析。结果 最终纳入11个非随机对照研究,共890例病人。其中,行机器人辅助腹腔镜肝切除术268例,传统腹腔镜肝切除术622例。Meta分析结果显示:机器人辅助组较传统腹腔镜组手术时间更长[MD=46.40,95%CI(18.17,74.63),P=0.001],术中出血量更多[MD=78.70,95%CI(19.18,138.22),P=0.01],但两组病人的平均住院日、中转开腹率、并发症发生率、3个月生存率及3年生存率差异均无统计学意义。结论 机器人系统在肝脏手术中是安全可行的,与传统腹腔镜相比,虽然其手术时间更长,术中出血量更多,但是在平均住院日、中转开腹率、并发症发生率、3个月生存率及3年生存率等方面两者无明显差异。鉴于纳入研究较少,样本量小,且文献质量受限,各研究评价方法变异性较大,所以上述结论仍需多中心、大样本量并且高质量的随机对照研究进一步验证。
手术机器人;腹腔镜;肝切除术;肝脏肿瘤;Meta分析
肝切除术是目前治疗肝脏肿瘤最有效的手段之一。近年来,越来越多的证据表明,腹腔镜肝切除术能取得与开腹肝切除术相近的临床疗效。但由于肝脏所处腹部位置特殊,肝脏质脆不利于牵拉,某些病灶所处部位不易显露,大范围腹腔镜肝切除出血不易控制以及手术时间较长术者易于疲劳等原因,限制了传统腹腔镜在肝脏外科的广泛应用[1]。随着科技的进步,机器人辅助手术系统开始逐渐应用于肝脏外科。2008年Choi等[2]率先报道了机器人辅助的腹腔镜肝左叶切除术。随后,国内外众多学者对机器人辅助下的肝脏切除术做了一系列的探索[3-7],部分单中心的回顾性研究表明,机器人辅助的腹腔镜肝切除治疗肝脏肿瘤取得了与传统腹腔镜肝切除类似的疗效,甚至在局部缝合止血,术者舒适度等方面呈现出了更多的优势,但这些研究大都样本量较小。为了更客观地评价两种肝切除术在治疗肝脏肿瘤中的临床效果,本文就机器人辅助与传统腹腔镜在肝脏手术中的手术时间、术中出血量、平均住院日、中转开腹率及并发症发生率的不同进行了Meta分析。
资料与方法
一、检索策略
1.数据库 选择PubMed、Elsevier、Springer、Cochrane图书馆、CNKI、重庆维普和万方数据库。检索时限均为从建库至2014年11月。文献限中、英文。
2.检索词 选择中文检索词包括机器人、腹腔镜、肝切除、肝脏手术;英文检索词包括robot、laparoscopy、liver resection/surgery,robotic/laparoscopic hepatectomy。
3.检索步骤 ①在PubMed、Elsevier、Springer、Cochrane图书馆、CNKI、重庆维普和万方数据库中检索相关的原始论文,并对所获文献文题、摘要、所用的关键词以及主题词进行分析,以进一步确定文献检索的关键词;②运用所有相关的主题词和关键词进行数据库检索,如果摘要初步符合纳入标准,则进一步查找并阅读全文;③通过所获文献后附参考文献进一步手工和电子数据库检索。
二、文献纳入与排除标准
1.纳入标准 ①研究类型:优先考虑是否为随机对照试验,无论是否采用盲法或者分配隐藏,若无相关数据或者数据相对较少时,再纳入非随机对照试验。文献语言限中、英文;②研究对象:肝占位性病变且需要手术切除的病人,既往无相关类似手术病史,其性别、年龄、种族与国籍不限;③干预措施:机器人组使用手术机器人,腹腔镜组使用传统腹腔镜;④结局指标:手术时间、术中出血量、中转开腹率、并发症发生率和平均住院日;⑤研究开展时间或文献发表年限必须在5年以内且随访年限不限。
2.文献排除标准 ①信息较少、数据不全或无法利用的文献;②一稿多投、雷同文献等使用其中数据较全、质量较高的一篇;③综述、病例报道、会议报告等;④研究样本合并其他器官的手术;⑤未提供充分原始数据且向原作者索取无果。
三、文献筛选、资料提取及质量评价
根据已确定的检索策略,由2位及以上研究员对每篇文献的题目和摘要进行审查和评价,确定符合入选标准的文献。阅读全文后对资料进行提取并交叉核对,内容包括:样本量、分组情况,研究对象的基本资料,结局指标中连续性指标的均数和标准差等。根据Cochrane协作网手册推荐的非随机研究偏倚风险评估方法(Newcastle-Ottawa scale,NOS)[8]评价非随机研究质量。在每项研究中使用“星号评分”来判断三个主要方面:研究组的选择;组间的可比性;结果的确定性。评价内容包括研究对象选择(4个条目,4分),组间可比性(1个条目,2分)和结果测量(3个条目,3分)。总分共9分,分数≥4分,提示质量较好;分数<4分时认为该研究质量较差。如遇分歧,讨论解决,必要时征询第三方意见以达成一致。
四、统计学分析
采用RevMan 5.3分析软件对资料进行综合分析。计量资料采用均数差(MD)及其95%CI,计数资料采用比值比(OR)及其95%CI。首先通过卡方检验确定研究间是否存在异质性,若P>0.1, I2<50%可认为多个同类研究具有同质性,可选用固定效应模型进行Meta分析;如果P<0.1, I2>50%,但临床上判断各组间具有一致性需要进行合并时,则选择随机效应模型。如P<0.1且无法判断异质性的来源,则不进行Meta分析,采用描述性分析。
结 果
一、纳入研究的一般情况及质量评价
初检出相关文献302篇,其中英文文献277篇,中文文献25篇。剔除重复发表及明显不符合纳入标准的文献255篇,经阅读文题和摘要,排除期刊目录、栏目介绍、消息报道等非研究性文献21篇,进一步查找阅读全文,排除无对照的临床试验后,最终纳入11篇文献[9-19]。其中中文文献2篇,英文文献9篇,总共890例病人(机器人组268例,腹腔镜镜622例)。纳入研究的一般情况见表1,文献质量评价结果见表2。
二、Meta分析结果指标
1.手术时间 11篇文献均报道了手术时间(min),对文献数据进行异质性检验,提示手术时间的研究结果存在异质性(P<0.00001,I2=89%),故采用随机效应模型进行合并分析。结果显示,机器人组较腹腔镜组在肝脏手术中手术时间更长[MD=46.40,95%CI(18.17,74.63),P=0.001],见图1。
2.术中出血量 11篇文献均报道了术中出血量(ml),其中2篇文献[10,12]未提供标准差,故纳入10篇文献的数据。异质性检验的结果提示术中出血量的研究结果存在异质性(P=0.01,I2=57%),随机效应模型分析显示两组的术中出血量存在显著性差异[MD=78.70,95%CI(19.18,138.22),P=0.01],手术机器人较之传统腹腔镜在肝脏手术中的出血量更多,见图2。
3.平均住院日 10篇文献报道了平均住院日(d),其中1篇文献[10]未提供标准差,故纳入9篇文献进行meta分析。异质性检验结果示平均住院日的研究存在明显异质性。(P<0.00001,I2=89%),采用随机效应模型分析,结果显示两组的平均住院日不存在显著性差异[MD=0.04,95%CI(-0.73,0.81),P=0.92],提示机器人辅助与传统腹腔镜肝切除在平均住院日方面的差异无统计学意义。
4.中转开腹率 11篇文献中有3篇[12,14,18]未报道中转开腹率(%),因此纳入8篇文献的数据进行合并分析。对文献数据进行异质性检验,提示中转开腹率的结果无异质性(P=0.05,I2=51%),故采用随机效应模型进行Meta分析。结果显示两组差异无统计学意义[OR=1.29,95%CI(0.46,3.66),P=0.63],提示手术机器人相比传统腹腔镜在肝脏手术中的中转开腹率差异无统计学意义。
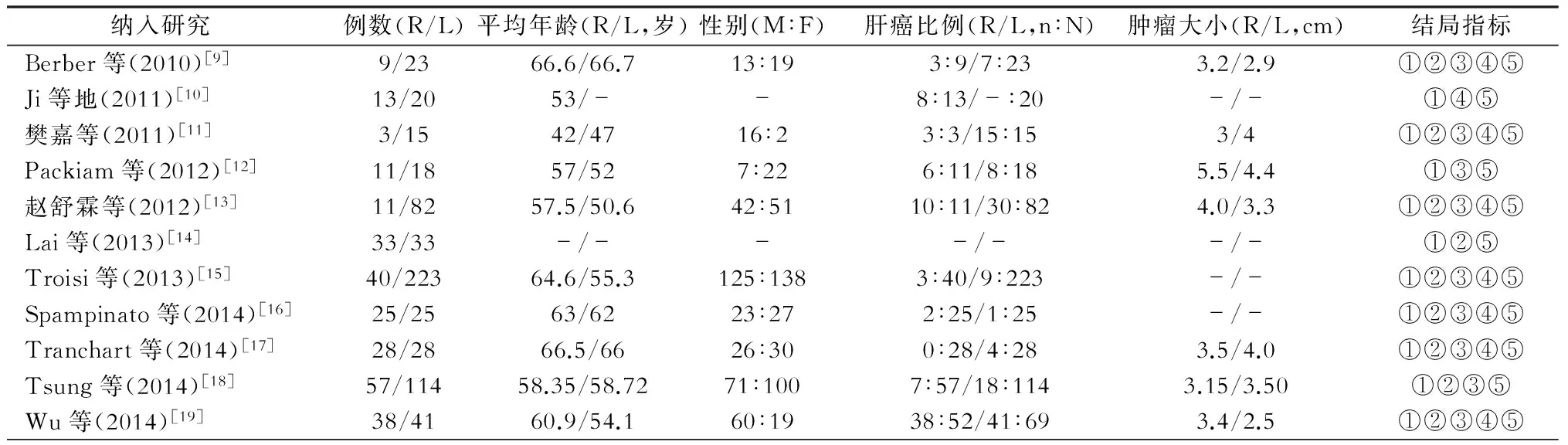
表1 纳入研究的一般特征
注:R:机器人辅助;L:传统腹腔镜;M∶F 男:女 结局指标:①手术时间;②术中出血量;③平均住院日;④中转开腹率;⑤并发症发生率

表2 纳入研究的质量评价(NOS“星号评分”)

图1 两组手术时间比较的Meta分析
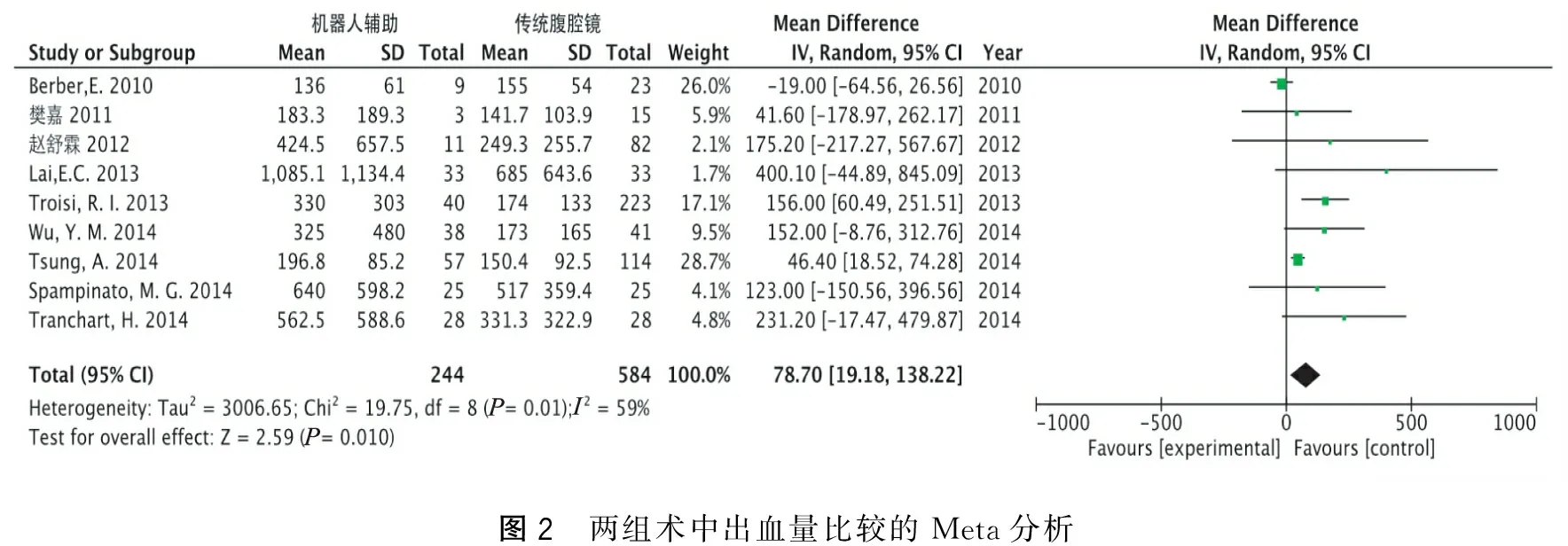
图2 两组术中出血量比较的Meta分析
5.并发症发生率 11篇文献均描述了术后并发症的发生率(%),对数据进行异质性检验,提示并发症发生率的研究结果不存在异质性(P=0.74,I2=0%)。固定效应模型分析后,结果显示两组的差异无统计学意义[OR=0.80,95%CI(0.53,1.23),P=0.31],提示手术机器人较之传统腹腔镜在肝脏手术后的并发症发生率上差异无统计学意义(图3)。

图3 术后并发症发生率的漏斗图
6.3个月生存率 3篇文献[9,16,18]报道了术后3个月的生存率,异质性检验结果提示3个月生存率的数据无异质性(P=0.99,I2=0%).因此采用固定效应模型进行Meta分析。结果显示机器人辅助组对比传统腹腔镜组在3个月生存率上差异无统计学意义[OR=2.95,95%CI(0.49,17.92),P=0.24]。
7.3年生存率 2篇文献[9,13]描述了术后3年生存率,合并文献数据后进行异质性检验,结果显示该数据不存在异质性(P=0.53,I2=0%),故采用固定效应模型,Meta分析结果提示两组的差异无统计学意义[OR=1.47,95%CI(0.16,13.38),P=0.73],从而提示机器人辅助组对比传统腹腔镜组在3年生存率上差异无统计学意义。
讨 论
近年来,腹腔镜技术在肝脏外科得到了日益广泛的应用。但随着手术难度的提升,传统腹腔镜技术的局限性如手术野不易显露,精细缝合较困难,对助手要求较高,术者易于疲劳等问题逐渐凸显出来。而机器人辅助手术系统的出现逐步弥补了传统腹腔镜技术的不足,如术者通过双手的动作带动手术台车上的机械手来模拟各种手术操作;并且借助其配备的Institutive辅助控制技术,自动过滤术者手部的抖动信号,使术者的操作更为精准。同时手术机器人的3D高清影像系统可提供放大10~15倍的全景三维立体术野,充分解决在传统腹腔镜手术中无法辨别组织前后相对关系的问题,良好的视野便于完成肝门部的复杂解剖。术者还可通过声控、手控或脚踏板控制镜头,双脚则置于控制台下的脚踏板上配合完成电切、电凝等相关操作。此外,术者手术操作的舒适度较传统腹腔镜手术有较大的提升。上述技术的进展,有助于肝切除术向更为精准、精巧和精细的方向发展。
本研究旨在比较手术机器人辅助与传统腹腔镜肝切除术治疗肝脏肿瘤的效果。共纳入了国内外12篇文献进行Meta分析,结果显示:机器人组较腹腔镜组在肝脏手术中手术时间更长[MD=51.67,95%CI(24.05,79.28),P=0.0002],可能是由于手术机器人在术前的安装调试和术中手臂的更换要花去大量的时间,使得手术耗时较长。在术中出血量上,两组差异存在统计学意义[MD=74.79,95%CI(15.27,134.32),P=0.01],手术机器人较之传统腹腔镜在肝脏手术中的出血量更多,尽管从现有的资料无法确切解释出现这种差别的原因,但机器人辅助组例数较少,也从侧面反映术者可能大多处于学习曲线期,此外机器人辅助组所切除的肝脏肿瘤的体积较大抑或是其实施了更为复杂的肝切除术从而导致了更多的术中出血量。另一方面,手术机器人与传统腹腔镜在平均住院日、中转开腹率、手术并发症发生率、3个月生存率及3年生存率这五个方面差异无统计学意义 (P>0.05),同时并发症发生率的漏斗图集中在上半部,左右基本对称,表明存在发表偏倚的可能性较小。
目前,比较手术机器人辅助和传统腹腔镜肝切除术的文献较少,更缺乏此类研究的系统性回顾分析。尽管本研究对严格筛选的11篇高质量文献中的890例病人进行合并分析,得出了如下结论:机器人辅助与传统腹腔镜肝切除相比,虽然其手术时间更长,术中出血量更多,但是在平均住院日、中转开腹率及并发症发生率等方面两者无明显差异。本研究的不足之处在于:①未能选取到随机同期对照试验,试验中也未能做到盲法,当然这与目前手术机器人刚刚兴起还未广泛开展应用有关;②部分文献研究的基本信息不全,其数据标准差较大,可能与事实有偏差;③文献语种仅限中、英文,其他语种的研究未能纳入,可能存在偏倚。④部分结局指标在各研究间存在异质性,且无法消除,其来源可能与病人个体差异、测量手段及非同一操作者等有关。因此,为了对机器人辅助的腹腔镜肝切除术的效果有更为准确的评价,仍需要开展大样本量、多中心的随机对照研究加以证实。
1 Ruurda JP,van Vroonhoven TJ,Broeders IA.Robot-assisted surgical systems:a new era in laparoscopic surgery.Ann R Coll Surg Engl,2002,84:223-226.
2 Choi SB,Park JS,Kim JK,et al.Early experiences of robotic-assisted laparoscopic liver resection.Yonsei Med J,2008,49:632-638.
3 Casciola L,Patriti A,Ceccarelli G,et al.Robot-assisted parenchymal-sparing liver surgery including lesions located in the posterosuperior segments.Surg Endosc,2011,25:3815-3824.
4 Giulianotti PC,Sbrana F,Coratti A,et al.Totally robotic right hepatectomy: surgical technique and outcomes.Arch Surg,2011,146:844-850.
5 Giulianotti PC,Coratti A,Sbrana F,et al.Robotic liver surgery: Results for 70 resections.Surgery,2011,149:29-39.
6 Choi GH,Choi SH,Kim SH,et al.Robotic liver resection: technique and results of 30 consecutive procedures.Surg Endosc,2012,26:2247-2258.
7 顾磊,詹茜,邓侠兴,等.“达芬奇”机器人在肝胆胰手术中的应用(单中心报道).外科理论与实践, 2013,3:275-280.
8 Cota GF,de Sousa MR,Fereguetti TO,et al.Efficacy of anti-leishmania therapy in visceral leishmaniasis among HIV infected patients:a systematic review with indirect comparison.PLoS Negl Trop Dis, 2013,7:2195.
9 Berber E,Akyildiz HY,Aucejo F,et al.Robotic versus laparoscopic resection of liver tumours.HPB (Oxford),2010,12:583-586.
10Ji WB,Wang HG,Zhao ZM,et al.Robotic-assisted laparoscopic anatomic hepatectomy in China: initial experience. Ann Surg,2011,253:342-348.
11樊嘉,周俭,王鲁,等.比较机器人外科手术系统与腹腔镜肝切除治疗肝细胞癌的初步结果.上海医学,2011,34:15-18.
12Packiam V,Bartlett DL,Tohme S,et al.Minimally invasive liver resection:robotic versus laparoscopic left lateral sectionectomy.J Gastrointest Surg,2012,16:2233-2238.
13赵舒霖,沈柏用,邓侠兴,等.肝脏肿瘤的微创治疗——从腹腔镜到机器人.中国普外基础与临床杂志,2012,7:697-703.
14Lai EC,Yang GP,Tang CN.Robot-assisted laparoscopic liver resection for hepatocellular carcinoma:short-term outcome.Am J Surg,2013,205: 697-702.
15Troisi RI,Patriti A,Montalti R,et al.Robot assistance in liver surgery: a real advantage over a fully laparoscopic approach?Results of a comparative bi-institutional analysis.Int J Med Robot,2013,9:160-166.
16Spampinato MG,Coratti A,Bianco L,et al.Perioperative outcomes of laparoscopic and robot-assisted major hepatectomies:an Italian multi-institutional comparative study.Surg Endosc,2014,28:2973-2979
17Tranchart H,Ceribelli C,Ferretti S,et al.Traditional versus Robot-Assisted Full Laparoscopic Liver Resection: A Matched-Pair Comparative Study.World J Surg,2014,38:2904-2909
18Tsung A,Geller DA,Sukato DC,et al.Robotic versus laparoscopic hepatectomy: a matched comparison.Ann Surg,2014,259:549-555.
19Wu YM,Hu RH,Lai HS,et al.Robotic-assisted minimally invasive liver resection.Asian J Surg, 2014,37:53-57.
Clinical efficacies of robot-assisted versus conventional laparoscopic liver resection: ameta-analysis
LanTian,MaWeijie,YuMancheng,WuLong,WangHaitao,ChangLei,TangShengli,YuanYufeng.
DepartmentofHepatobiliary&PancreaticSurgery,ZhongnanHospital,WuhanUniversity,Wuhan430071,China
YuanYufeng,Email:yuanyf1971@163.com
Objective To systematically evaluate the clinical efficacies of robot-assisted versus conventional laparoscopic resections of hepatic tumors.Methods The databases of PubMed, Elsevier, Springer, Cochrane Library, CNKI, Chongqing VIP and WanFang were searched for randomized or nonrandomized controlled trials of robot-assisted and conventional laparoscopic hepatectomies. The studies were screened by the inclusion and exclusion criteria. The data were extracted and their qualities evaluated by two independent researchers. RevMan 5.3 software was used for meta-analysis.Results A total of 12 nonrandomized controlled trials were included. Among 909 patients, robotic-assisted laparoscopic hepatectomy (n=277) and conventional laparoscopic hepatectomy (n=632) were performed. The results of meta-analysis showed that operative duration was longer in robot-assisted group than that in conventional laparoscopy group [MD=51.67, 95%CI(24.05,79.28),P=0.0002]. And intraoperative bleeding volume was greater in robot-assisted group [MD=74.79, 95%CI(15.27,134.32),P=0.01]. No inter-group statistically significant difference existed in average hospital stay, laparotomy rate or complication rate. Conclusions The robotic system is both safe and feasible for liver resection. Compared with conventional laparoscopy, it has longer operative duration and greater intraoperative bleeding volume. However, no significant differences existed in average hospital stay, laparotomy rate or complication rate. Due to the limitations of the number of studies, sample size and quality of references, multi-center, larger and better randomized controlled trials are warranted for further explorations.
Surgical robot; Laparoscopy; Hepatectomy; Hepatic tumor; Meta-analysis
·论 著·(肝脏肿瘤专题)
430071 武汉,武汉大学中南医院肝胆胰外科
袁玉峰,Email:yuanyf1971@163.com
R735.7
A
10.3969/j.issn.1003-5591.2015.02.007
2015-03-13)
猜你喜欢
现代企业(2021年2期)2021-07-20 07:57:10
当代医药论丛(2021年2期)2021-02-24 10:44:50
中西医结合心血管病杂志(电子版)(2018年33期)2018-12-05 02:20:12
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
邯郸职业技术学院学报(2016年2期)2016-02-27 13:39:26
中国卫生标准管理(2015年7期)2016-01-15 03:58:38
中国卫生标准管理(2015年15期)2016-01-15 02:58:43
中国卫生标准管理(2015年18期)2015-01-26 21:30:02
首都外语论坛(2014年1期)2014-03-20 15:21:36
河南医学研究(2014年7期)2014-02-27 14:53:26