
50 000 t半潜船自动化系统的设计与应用
2015-06-07 09:22:14蒋晓亮
江苏船舶 2015年3期
蒋晓亮,黄 丞,王 蓉
(上海船舶研究设计院,上海 201203)
50 000 t半潜船自动化系统的设计与应用
蒋晓亮,黄 丞,王 蓉
(上海船舶研究设计院,上海 201203)
基于半潜船对自动化技术要求高的特点,对50 000 t半潜船舶自动化技术进行了研究。主要介绍了船舶自动化系统的构成,详细描述了机舱控制监测系统、推进系统、电站管理系统以及压载控制系统的功能,认为利用网络化和数字化技术实现的全船自动化控制是未来发展的方向,具有广阔的应用前景。
半潜船;自动化系统;监控系统
0 引言
自动化系统已广泛应用于各类船型,不仅减轻了工作人员的劳动强度,而且可以有效降低运输成本和风险。半潜船是一种装载大型钢结构件、海洋平台以及无动力舰艇等高附加值特种货船,其装卸货时需进行上浮下潜作业,相比其他散货船该船型监控设备更多,控制逻辑更为复杂,因此对自动化系统的要求更高。本文以50 000 t半潜船为研究对象,阐述了自动化系统在半潜船上的设计与应用。
1 系统框架
50 000 t半潜船的自动化系统是集成了监测、报警以及控制于一体的综合监测报警控制系统,采用分布式处理结构,基于现场总线和工业以太网相结合的开放网络系统。整个系统分为下层现场控制网络和上层管理网络。下层现场控制网络提供接口接入设备系统,收集设备系统实时运行的数据经处理后转发至上层管理网络。上层管理网络包含各种应用系统和数据库,处理、监测及存储下层现场控制网络发来的数据。系统架构如图1所示。
系统包括7台工作站(OS):1台设置在驾控台,主要用于推进控制和操舵控制;2台设置在货控台,用于上浮下潜作业时的排压载控制;1台设置在右低压配电板间、1台设置在左变频器间,用于电站管理;2台设置在集控台,主要用于设备的监测报警以及舱底水控制等。各个工作站相互独立且不互相依赖,当其中1台发生故障,不会引起其他工作站的异常。同时,可根据每个工作站的用途,设置不同的权限来避免误操作,保证系统的可靠性。整个网络采用了冗余设计,网络分配单元(NDU)作为星形连接器,由路由器、转换器构成,连接上下层网络。全船设有16个采集箱(SAU),安装在机舱或推进器舱等靠近传感器和执行机构的处所,用来采集模拟和数字信号,同时可以向设备提供输出信号。该模块具有监测和自动控制功能,是整套系统的核心部分。主干网络采用的光纤连接,满足了长距离以及高速率的传输要求。
2 系统组成
全船自动化系统分为4个功能模块,包括推进控制系统、机舱监测报警系统、电站管理系统以及压载控制系统。
2.1 推进控制系统
本船采用的是电力推进,其控制系统与传统的柴油机控制系统有较大的差异。主推进电动机由脉宽调制控制的变频器供电,通过控制变频器可实现调节推进电机转速,控制船舶航速,设定推进特性曲线,保护电机马达等功能。在设计推进控制系统时需要考虑各种工况,尤其如紧急停车等对全船电站冲击的影响,以及发电机组的负荷承受能力,因此需要通过控制系统本身,调整电机转速、功率等方式改善电网的状态,同时在推进器发生故障时通知电站管理系统采取必要的措施进行调整。
另外还配有动力定位系统。动力定位是凭借自动或手动控制的水动力系统,使船舶在其作业时,能够在规定的作业范围和环境条件下保持其船位和艏向。动力定位系统在中国船级社规范中分为3个等级:DP-1、DP-2、DP-3。其中 DP-1对控制系统的构成没有太大的影响,而DP-2和DP-3对系统提出了冗余要求,其控制系统结构有着根本的变化。本船是基于DP-2的设计,即在出现单个故障(不包括1个舱室或几个舱室的损失)后,可在规定的环境条件下,在规定的作业范围内自动保持船舶的位置和艏向[1],这就要求至少需配置2套独立的推进系统及其控制系统。如图1所示,配置的2套推进系统相互独立,且分别布置在左右机舱,实现物理分割,一侧设备出现故障将不会影响到另一侧。动力定位在驾驶室的货控台位置进行操作,其包括监测、控制于一体,是一种多回路反馈闭环控制系统。安装在船身的传感器和定位系统测量出风、浪、流等作用在船上的环境力以及当前船位和艏向,系统通过比对测量值和设定值,输出偏差信号,然后计算出消除环境干扰使船体到达期望位置所需的合力,再对各个推进器进行动力分配,使船舶保持在设定的位置或航向。
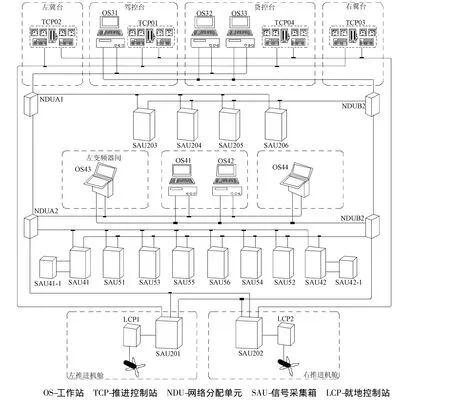
图1 系统架构图
2.2 机舱监测报警系统
机舱监测报警系统负责收集机舱内设备的参数及运行状态。当监测信号状态发生变化或参数超过正常范围,且该监测点没有被闭锁时,则系统会立即或延迟发出声光报警信号。如果报警点短时间自动恢复正常,仍需要轮机员去进行报警复位。在恶劣的机舱环境中,一些监测信号容易受到干扰。为避免误报警,设有延时报警单元,在延时时间之内即使报警点参数超出正常范围也不会激活报警。系统还具有报警闭锁功能,用来屏蔽一些不必要的报警点。另外还兼有延伸报警、轮机员安全等基本功能。
2.3 电站管理系统
本船采用的是中压配电系统。由于需满足DP-2的要求,主电站在机舱左右配电间各布置1组中压配电板以及低压配电板。每组中压配电板连接2台发电机,母排通过联络开关连接。当一侧发生故障时,联络开关能瞬间自动断开,从而不会影响另一侧电站的正常工作。
电站管理系统是全船自动化系统的核心内容之一,它从系统决策层面管理和分配电能,是控制策略的制定者。特别是对于电力推进系统,在推进电机运行当中,受到复杂多变的海况影响,螺旋桨负荷可能短时间内在10%~100%变动,这样可能会导致电网瞬时功率过大,因此本船系统采用一种基于事件算法的功率限制和保护方法,其通过采集的发电机断路器状态量和中央处理器采集系统各点后的计算量相结合,快速实现推进功率的限制和保护[2]。
由于中压电站具有高电力容量、多电压等级的特性,同时推进电机的负荷较大,在起动、调速和制动时都会对电网产生冲击,而推进系统的变频器变压器、导航控制设备等又需要稳定低滤波的电源,因此电站管理系统不单要对各个设备进行优化管理,还要综合考虑整个电网系统,以整体优化为目标,提高全船运行的稳定性、安全性和经济性[3]。
2.4 压载控制系统
压载系统是半潜船的重要系统之一,通过对全船压载水的注入、排出或调驳,达到上浮下潜及调整船舶稳性等目的。本船使用的是与潜艇类似的压缩空气压载系统,其工作原理为通过控制压载空压机调整压载舱内空气垫的容积来控制压载水量。与其他压载模式相比,进排水速度明显较快,能耗小,成本较低,但其缺点是设备管路多,阀门与空压机控制逻辑关系复杂。如果通过船员手动控制,操作复杂、控制难度大。为便于监视和管理,本船的压载空压机系统、阀门遥控系统以及液位遥测系统均通过通讯接口将数据输入至自动化系统,经处理之后工作站便可集中显示设备运行状态、压载舱液位以及遥控阀开闭等信息,并且能够遥控遥控阀的开闭和压载空压机等设备的起停。另外系统还能够按照预设的程序进行自动控制,完成上浮下潜作业,无需逐步操作阀门和压载空压机,从而降低了控制难度。
3 结语
通过应用船舶综合自动化系统,不但能够保证船舶运行的安全,还可以进一步提高船舶设备的运行效率和性能。伴随着信息技术的进步,今后的自动化系统将全面向数字化、网络化方向发展,通过采用卫星等无线通讯技术,船内自动化网络将与船舶运营管理中心或海上安全中心等计算机网络紧密连接,建立起船岸一体化监控管理网络,在岸基即可监控船上重要设备的状态信息和船舶运行的重要参数,能够快速对船舶进行调度,及时预警海上突发事件,远距离维护船内重要设备等,大大增强了营运的竞争力。在现代航运企业追求实时、高效、绿色环保的先进理念下,船舶综合自动化系统的应用前景将十分广阔。
[1] 中国船级社.钢质海船入级规范[M].北京:人民交通出版社,2014.
[2] 刘建波,张浩.功率管理技术在舰船电力推进中的应用[J].船电技术,2011,31(7):65-69.
[3] 王加雷.船舶高压电站功率管理系统的设计与管理[D].大连:大连海事大学,2011.
U674.2
A
2015-01-17
蒋晓亮(1984—),男,工程师,从事船舶电气设计工作;黄丞(1986—),男,助理工程师,从事船舶电气设计工作;王蓉(1973—),女,高级工程师,从事船舶电气设计工作。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:02
水上消防(2022年2期)2022-07-22 08:43:56
铝加工(2021年6期)2021-12-04 00:34:13
水上消防(2021年3期)2021-08-21 03:12:20
水上消防(2020年5期)2020-12-14 07:16:20
学生导报·中职周刊(2019年7期)2019-06-11 11:06:10
设备管理与维修(2018年23期)2018-12-20 09:22:46
世界海运(2017年9期)2017-12-15 08:58:01
设备管理与维修(2016年5期)2016-03-16 02:20:50
船舶标准化工程师(2015年5期)2015-12-03 11:00:29
