
基于主动轮廓模型联合Camshift算法的目标跟踪方法
2015-06-05 09:50:59肖理庆孙金萍程德强
电视技术 2015年19期
厉 丹,田 隽, 肖理庆,孙金萍,程德强
(1.徐州工程学院,江苏 徐州 221000;2.徐州市机器视觉应用工程技术研究中心,江苏 徐州 221000;3.中国矿业大学 信电学院,江苏 徐州 221000)
基于主动轮廓模型联合Camshift算法的目标跟踪方法
厉 丹1,2,田 隽1,2, 肖理庆1,2,孙金萍1,2,程德强3
(1.徐州工程学院,江苏 徐州 221000;2.徐州市机器视觉应用工程技术研究中心,江苏 徐州 221000;3.中国矿业大学 信电学院,江苏 徐州 221000)
针对城市道路交通环境中传统Camshift算法跟踪窗不能描述运动目标轮廓以及易受近似颜色干扰跟踪丢失的问题,提出基于Snake主动轮廓模型联合Chamshift区域模型的目标跟踪方法,算法将原Camshift算法中使用的HSV颜色特征和LTP纹理特征融合,增加了抗干扰能力,同时利用多尺度小波改进的Snake主动轮廓模型进一步对物体轮廓检测,去除阴影区域,更为直观地描述了物体的轮廓。实验证明,新方法在城市道路交通监控中有良好的应用前景。
主动轮廓模型;Camshift;交通;目标跟踪
基于机器视觉的智能交通车辆跟踪技术在城市道路交通监控中发挥着越来越重要的作用。通过对车辆实时监控可以获取车速、流量等信息,为后续的行为识别打下基础[1-2]。目前的目标跟踪方法主要包括轮廓模型跟踪、区域模型跟踪及特征模型跟踪。然而,受户外交通环境车辆形变、光照不均、目标背景颜色接近等复杂环境的影响,常用的跟踪算法易丢失目标致使跟踪失败。
Snake主动轮廓模型[3]将目标形状信息利用轮廓描述,能够形成连续、闭合的光滑轮廓线,于1987年由Kass等人提出。该模型有较强的抗噪能力,定义能量函数描述灰度、轮廓信息,利用边缘特征,在收敛于自身能量极小值过程中不断地迭代逼近真实轮廓。但该模型存在动态规划时间开销大、对初始位置敏感的问题。连续自适应均值漂移Camshift算法[4-5]是一种无需参数的基于核密度的快速模式匹配算法,计算简单、实时性高,虽可自适应目标大小调整跟踪窗,但仅通过矩形或椭圆跟踪窗无法描述目标轮廓信息,从而影响后续目标分类和行为识别,且在复杂环境中该算法易受到干扰。
本文针对城市道路交通环境,提出了基于Snake主动轮廓模型联合基于Chamshift区域模型的目标跟踪方法。新方法具有较好的抗环境干扰特性,在目标运动过程中,通过多尺度小波改进的Snake主动轮廓模型准确对物体进行精确轮廓检测,同时利用Camshift算法将颜色、纹理特征融合跟踪目标,提高了监控系统中城市道路车辆辨识能力,使跟踪具有更好的鲁棒性。
1 Snake活动轮廓模型
Snake模型参数化描述为v(s)=(x(s),y(s)),s∈[0, 1],通过参数化曲线和曲面表示变形,曲线参数为s,轮廓点坐标为(x,y)。总能量公式表示如下
(1)
(2)
1.1 轮廓离散化
以曲线控制点集合描述轮廓曲线v(s)。控制点之间的关系应符合如下公式
(3)
(xi+2-2xi+1+xi)2+(yi+2-2yi+1+yi)2
(4)
式中:vi-1和vi+1是曲线上vi邻接的2个控制点,第i+1个控制点为vi,vi=(xi,yi),V=(v0,v1,…,vi-1,vi,…,vn-1),i=0,1,…,n-1。
内部能量函数微分形式表示如下
Eint= (α(s)((xi+1-xi)2+(yi+1-yi)2)+β(s)·
((xi+2-2xi+1+xi)2+(yi+2-2yi+1+yi)2))
(5)
外部能量函数表示如下
(6)
β((xi+2-2xi+1+xi)2+
(yi+2-2yi+1+yi)2)-ω(gi)2)
(7)
1.2Snake模型改进
为了解决传统Snake模型迭代过程运算量大、对初始位置敏感、抗噪能力较差的问题,利用文献[6]提出的多尺度小波能量方法,得到公式

(8)式中:vi为蛇点,n(vi)为内法线矢量。令k是方向参数,其值为1或-1。选择尺度为2j,多层小波变换图像,新外力表示如下
(9)

(10)
(11)
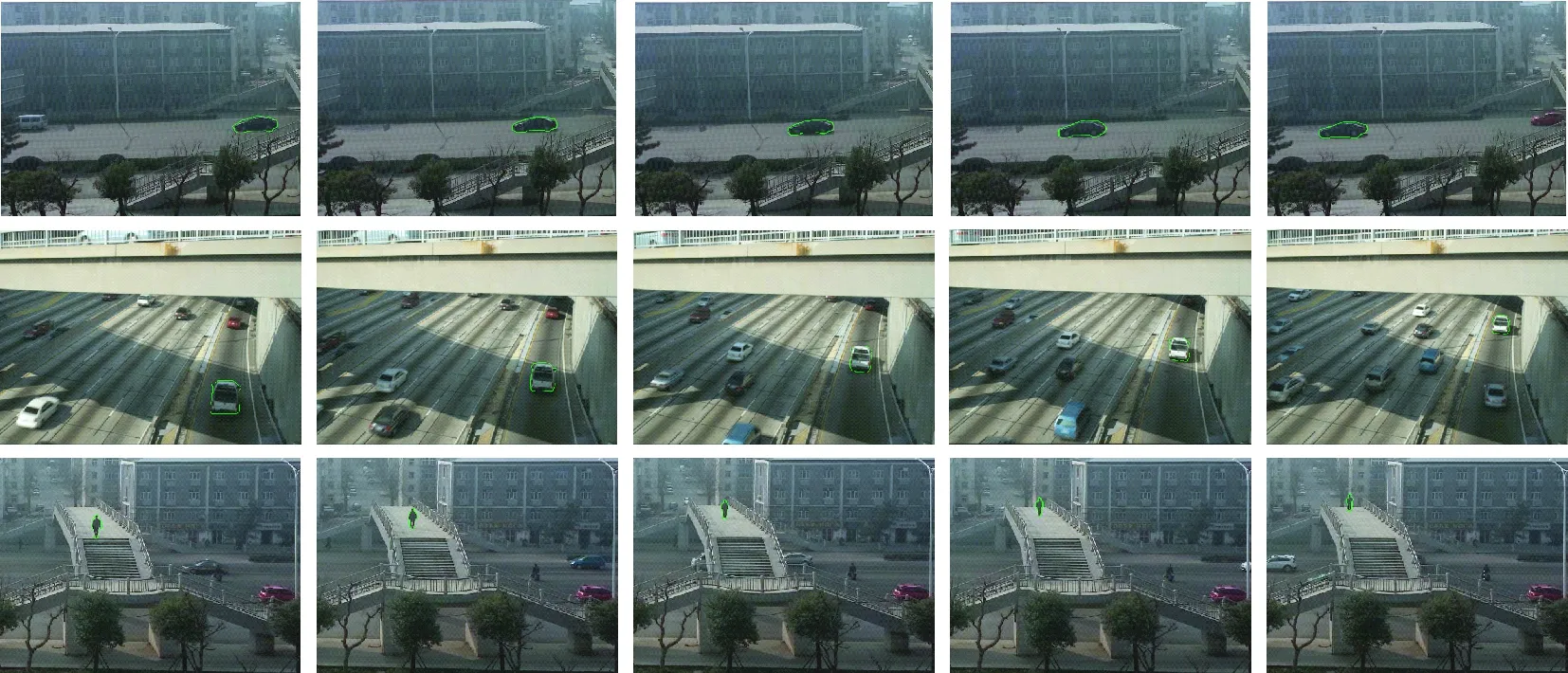
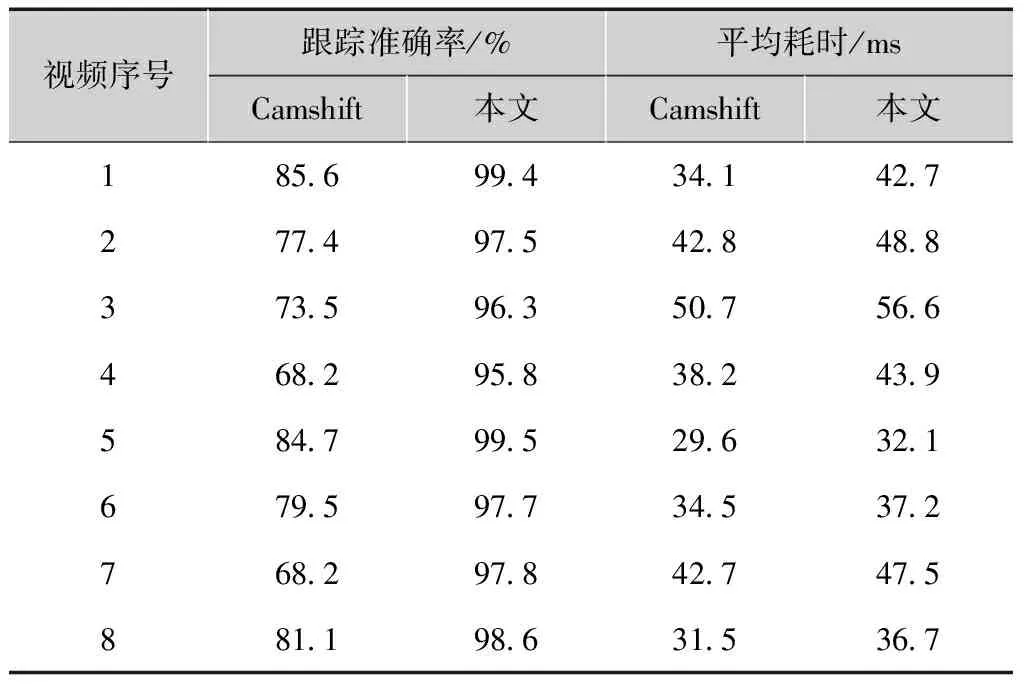
3)使j=j+1,J为最大层的层数,j 给定模型参数后,初始轮廓离散成2M-J+1投影在尺寸为2N-J+1×2N-J+1的图像上,由粗尺度收敛于高尺度。由于改进算法使得复杂细节变平滑,因此蛇点数量降低,运算时间降低,迭代的次数也随之减少。多尺度小波变换的Snake主动轮廓模型提取方法通过结合小波边缘检测,在减少对初始位置敏感性的同时节省了时间开销。 Camshift算法选择HSV颜色模型作为跟踪特征减少了光照影响,利用图像颜色概率密度的分布特征跟踪目标,通过搜索窗二阶矩估计目标大小、方向角从而自适应调节窗口大小和角度。算法计算简单,匹配速度快,实时性高,但复杂环境易受相近颜色干扰。所以本文利用Camshift算法将颜色和纹理多类特征融合,提高目标识别率,取Camshift算法搜索框区域和高斯背景建模后的相同位置区域求差,获取目标初始边缘后进一步利用形态学及多尺度小波变换的Snake主动轮廓模型搜索目标轮廓,精确提取运动目标。 2.1 纹理特征融合的Camshift 纹理特征相对运动目标较为稳定,体现了图像灰度级空间分布的特性。本文采用Tan、Bill提出的对噪声有良好的抗噪能力的LTP局部三值模式纹理模型[7-8],解决了运动车辆颜色相近时容易相互干扰的问题。融合过程如下: 选取初始大小为s,位置中心为(xc,yc)的搜索窗口,内部像素为{xi,i=1,2,…,n},窗口中心y,宽h,在以(xc,yc)为中心的搜索窗1.5倍范围内,用直方图分别描述不同特征空间,建立候选目标、目标模板的特征概率密度分布函数如下 (12) (13) (14) a1wi(u1)+…+akwi(uk) (15) 利用建立的多特征模板,不同特征设置不同的权值,提高了前景和背景的区分能力,保证了跟踪的稳定性。 2.2 运动目标轮廓提取 利用纹理特征融合的Camshift算法获取每帧中运动目标的中心位置(xc,yc),同时根据搜索窗大小提取前景矩形区域,并将相同区域的高斯模型统计的背景图像也提取出来,两者相减,即得到初始目标边缘。由于光线被目标遮挡时会存在阴影,影响轮廓提取准确度,因此本文根据颜色模型的特性,利用HSV颜色空间去除阴影。从RGB到HSV转换过程如下 (18) (19) HSV颜色空间中H和S通道对阴影区域不敏感,V通道比较敏感,利用将饱和度S、色度H同亮度分量V分离,仅使用饱和度和色度来反应运动目标的本质特性进行聚类可以较好地消除阴影。 如图1所示,图1a为根据Camshift算法的当前帧搜索窗大小提取的矩形区域通过高斯背景模型重建的背景区域,图1b为相同区域的前景区域,图1c中白色区域为前者背景差后进行形态学腐蚀膨胀后的目标区域,根据图1c获取运动目标如图1d所示,图1e为对目标区域进行边缘检测后初始边缘轮廓,图1f为利用多尺度小波变换的Snake模型提取并通过HSV颜色空间去除阴影后寻找到的目标精确轮廓。 图1 轮廓提取 对部分路段车辆视频通过改进算法进行实验分析。图2为本文部分跟踪结果,可以看出,由于将Snake主动轮廓模型联合Camshift区域模型,并融合了LTP纹理模型,在跟踪过程中利用图像空间分布特性,跟踪准确且轮廓清晰,能自适应仿射变换,且在光照变换情况下仍有较好鲁棒性。 图2 车辆和行人轮廓跟踪 表1列出了对8组视频中不同的运动目标分别用传统Camshift算法和本文算法进行跟踪准确率和耗时比较的情况。从跟踪准确率上看,由于本文融合了纹理特征,跟踪过程较为稳定,准确率较高,而原Camshift算法由于仅用颜色模型,当目标和环境中其他物体颜色接近时较为敏感,易被干扰,因此在复杂环境中易导致跟踪失败,准确率较低。从平均耗时上看,本文算法由于融合了LTP纹理特征,且目标分割后对其实施Snake主动轮廓迭代搜索及阴影去除,因此在跟踪过程中平均每帧的耗时稍高于原Camshift算法,但仍符合监控系统实时性的要求。 表1 跟踪准确率及平均耗时统计 视频序号跟踪准确率/%平均耗时/msCamshift本文Camshift本文18569943414272774975428488373596350756646829583824395847995296321679597734537276829784274758811986315367 本文提出了基于Snake主动轮廓模型联合Chamshift区域模型的目标跟踪方法。在目标跟踪过程中,对原Camshift算法中使用的HSV颜色模型融合纹理特征进行跟踪,在搜索窗区域,利用高斯模型建立的背景图像和前景图像获取目标初始轮廓,同时利用多尺度小波改进的Snake主动轮廓模型进一步对物体轮廓检测,去除阴影区域,较好地描述了物体的真实轮廓,使跟踪具有更好的鲁棒性,为交通视频监控系统中进一步的目标分类打下良好基础。 [1] 甘玲,潘小雷.一种应用于交通环境中的运动车辆跟踪方法[J].重庆邮电大学学报:自然科学版,2013,25(3):408-411. [2] 王相海,方玲玲,丛志环.卡尔曼粒子滤波的视频车辆跟踪算法研究[J].中国图象图形学报,2010,15(11):1615-1622. [3] KASS M,WITKIN A,TERZOPOULOS D.Snake:active contour models[J].International Journal of Computer Vision,1988,1(4):321-331. [4] 邬大鹏,程卫平,于盛林.基于帧间差分和运动估计的Camshift目标跟踪算法[J].光电工程,2010,37(1):55-60. [5] SORN S. CAMSHIFT-based algorithm for multiple object tracking[C]//Proc. 9th International Conference on Computing and Information Technology.[S.l.]:IEEE Press,2013:301-310. [6] 马波,张田文,李培华.基于改进外部力的多尺度蛇算法[J].计算机学报,2003,26(5):563-568. [7] TAN Xiaoyang,TRIGGS B. Enhanced local texture feature sets for face recognition under difficult lighting conditions[C]//Proc. Analysis and Modeling of Faces and Gestures.Rio de Janeiro, Brazil:[s.n.],2007:168-182. [8] 袁宝华,王欢,任明武.融合LTP与Fisherfaces的分块人脸识别[J].计算机工程,2012,38(10):154-156. 责任编辑:任健男 海信智能电视联合华数、荔枝推VIP院线 继6月海信宣布智能电视激活用户突破一千万之后,从9月起,海信智能电视联合华数、荔枝推VIP院线,正式在其实体店和电商渠道开放在线影视点播VIP年卡购买服务。这也预示着经过几年的发展,智能电视逐步扩大市场、培育用户并实现增值后,向商业运营迎来破局。 海信延用行业在线视频VIP收费模式,但又与乐视依托自身视频资源收取服务费模式不同。海信依托华数播控平台,联合华数牌照资源和荔枝内容牌照资源共同搭建了庞大的智能电视视频资源库。在线付费点播设置了信封年卡、华数年卡、荔枝年卡3个付费选项。信封年卡用户支付490元,可免费收看全年在线精品影视,包括最新更新的院线新片、好莱坞片库,以及4K、3D、杜比等优质家庭影院专区。 Target Tracking Method Based on Active Contour Models Combined Camshift Algorithm LI Dan1,2, TIAN Jun1,2, XIAO Liqing1,2, SUN Jinping1,2,CHENG Deqiang3 (1.XuzhouInstituteofTechnology,JiangsuXuzhou221000,China;2.MachineVistonApplicationsEngineeringandTechnologyResearchCenterofXuzhou,JiangsuXuzhou221000,China;3.CollegeofInformationandElectricEngineering,ChinaUniversityofMiningandTechnology,JiangsuXuzhou221000,China) In the environment of urban road traffic, the traditional Camshift algorithm tracking window can not describe the outline of the moving target tracking and exists the problem of the approximate color interference makes tracking missing. A target tracking method is proposed jointed with Snake active contour model and Chamshift regional model. It combines HSV color feature of original Camshift algorithm with LTP texture. Noise immunity is increased and multi-scale wavelet is used to improve the Snake active contour model. New method can move the shadow area and contours of the object can be better described. Experimental results show that the new method has a good prospect in urban road traffic monitoring. active contour model; Camshift; traffic; object tracking 住房城乡建设部科学技术计划项目(2014-K5-027);江苏省高校自然科学研究面上项目(15KJB520033);江苏省大型工程装备检测与控制重点建设实验室开放课题(JSKLEDC201211);国家自然科学基金项目(51204175;U1261105) TP391 A 10.16280/j.videoe.2015.19.025 厉 丹(1981— ),女,博士,副教授,研究方向为图像处理,视频监控; 田 隽(1981— ),女,博士,副教授,研究方向为智能图像处理; 肖理庆(1981— ),博士,讲师,研究方向为自动化控制、图像处理; 孙金萍(1980— ),女,博士在读,讲师,研究方向为图像处理; 程德强(1978— ),博士,教授,研究方向为数字视频传输控制。 2015-02-22 【本文献信息】厉丹,田隽, 肖理庆,等.基于主动轮廓模型联合Camshift算法的目标跟踪方法[J].电视技术,2015,39(19).2 运动目标轮廓检测



3 实验验证
4 小结
猜你喜欢
课堂内外·小学版(低年级)(2023年6期)2023-04-29 00:44:03
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06 09:08:52
软件(2020年3期)2020-04-20 01:45:18
制造技术与机床(2019年11期)2019-12-04 05:50:54
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
Coco薇(2017年8期)2017-08-03 15:23:38
太空探索(2016年5期)2016-07-12 15:17:55
Coco薇(2015年5期)2016-03-29 23:22:15
计算机工程(2015年4期)2015-07-05 08:27:39
时代英语·高三(2014年5期)2014-08-26 17:01:17
