两种直流PWM-M可逆调速系统的比较研究
2015-06-01 10:57:12李一鸣易学良
湖南理工学院学报(自然科学版) 2015年4期
李一鸣, 邓 斌, 荣 军, 易学良
(1. 湖南理工学院 计算机学院, 湖南 岳阳 414006; 2. 湖南理工学院 信息与通信工程学院, 湖南 岳阳 414006)
两种直流PWM-M可逆调速系统的比较研究
李一鸣1, 邓 斌1, 荣 军2, 易学良1
(1. 湖南理工学院 计算机学院, 湖南 岳阳 414006; 2. 湖南理工学院 信息与通信工程学院, 湖南 岳阳 414006)
直流电机具有优异的起动、调速及制动性能在直流调速领域应用广泛. 研究了两种直流PWM-M调速系统, 分析了它们的工作原理, 并在Matlab/Simulink中对它们进行建模与仿真, 最后对仿真结果进行了比较分析. 仿真结果表明双极式PWM-M调速和受限单极式PWM-M调速系统都具有优异的动静态特性, 它们均能实现直流电机的正反转, 而且可以实现电机的无极调速. 区别在于受限单极式PWM-M调速系统的稳定性比双极式PWM-M调速系统更加好.
直流调速; 双极式PWM-M调速; 受限单极式PWM-M调速; 建模与仿真
引言
跟异步电动机和同步电动机相比, 直流电动机是一个弱耦合系统, 它具有非常好的机械特性, 因此直流调速系统具有极好的运行性能和控制特性. 正是因为直流调速具有这么多的优点, 使得直流调速系统一直占据比较重要的地位[1,2]. 直流调速方法很多, 很多文献都介绍过, 而且取得了不错的效果[3,4]. 其中基于PWM控制技术的直流PWM-M可逆调速是最为常见的一种调速方法, 在生产和生活中比较常用. 正是基于这个原因, 本文对PWM-M直流调速中应用最广泛的双极式控制直流PWM-M调速和受限单极式控制直流PWM-M调速进行了比较研究, 最后在MATLAB/Simulink中对其进行了建模与仿真, 并对仿真结果进行了比较分析.
1 直流电动机调速方法及工作原理介绍
1.1 直流电动机调速方法
由电机与拖动理论知识可知, 直流电动机转速公式为[5]:

其中n为转速(r/min);Ia为电枢电流(A);Ua为电枢电压(V);CE为由电机结构决定的电动势常数;Ra为电枢回路总电阻(Ω); Φ为励磁磁通(Wb).
由式(1)可知, 直流电动机的调速有三种方法: 改变电枢电压Ua、通过改变励磁电流If来改变励磁磁通Φ和改变电枢电阻Ra. 本文主要针对改变电枢电压Ua进行直流电机调速研究.
1.2 改变电枢电压调速的基本原理
由文[6]可知直流电机通过改变电枢电压的方式来改变电机速度. 在任一时刻, 只要改变占空比就可以改变电机的电枢电压, 从而可以改变电机的速度. PWM调制时电机电枢两端的电压波形如图1所示, 其电枢电压平均值可以表示为:

其中U为直流电源电压;U为电枢电压平均值;T为PWM波的周期;为PWM波的占空比;Ton为功率开关管在一个PWM周期的开通时间;
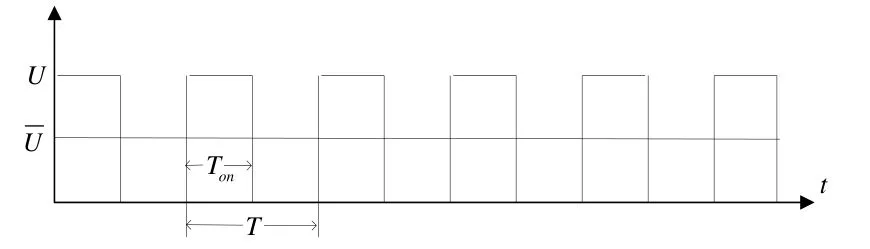
图1 PWM调制时电机电枢两端的电压波形
根据电机与拖动知识可知直流电动机的转速公式为[6]:

可见, 在恒转矩特性下, 直流电动机的转速n与PWM波的占空比Du成正比.
2 两种直流PWM-M可逆调速系统的工作原理介绍
2.1 PWM控制技术的工作原理
直流电机供电电路是由电力电子器件组成的整流电路, 承担着电能的变换和控制作用. 电力电子器件以开通和关断的方式工作, 通过控制电压脉冲宽度和脉冲序列的周期以达到改变电压大小的目的, 从而驱动直流电机运行, 即实现所谓的脉冲宽度调制(PWM)控制. 在直流电动机的控制中, 通过开关管的开通和关断, 在每半个周期中, 把电压的波形变换为一系列的矩形波. 假设ton为每个矩形波的宽度,toff为每两个矩形波之间的间隔宽度, 则矩形波的占空比Du可以表示为
由式(5)可知, 只要改变ton就可以轻松地改变占空比Du. 而由PWM控制技术知识可知, 直流电动机的电枢电压平均值与占空比Du成正比关系, 只需要改变占空比Du, 就可以去改变电枢电压, 这时就可以方便实现直流电机的无极调速.
2.2 双极式控制直流PWM-M调速系统的工作原理

目前常用H型的直流调速控制电路有三种, 分别为直流PWM-M调速系统、双极式控制直流PWM-M调速系统和受限极式直流PWM-M调速系统, 其中图2(a)和(b)分别为双极式H型PWM变换电路的工作原理图和工作波形图. 其工作原理分析如下:VT1和VT4的关断由Ub1和Ub4来驱动,VT2和VT3的驱动由Ub2和Ub3驱动. 当0≤t≤ton时,Ub1和Ub4此时为正向电压,VT1和VT4饱和导通; 当Ub2和Ub3为负时,VT1和VT4关断.此时如果加上UAB=US, 电流Id回路1导通. 当ton≤t≤T时,Ub1和Ub4反向变为负时,VT1和VT4关断.Ub2和Ub3为正向电压, 依然不能导通, 这是由于电感储能作用,VT2和VT3并不可以导通.Id从回路2经过VD2、VD3上续流. 当它们上面的电压使VT2和VT3承受反向电压时,UAB=−Us, 这就是一个周期工作过程.
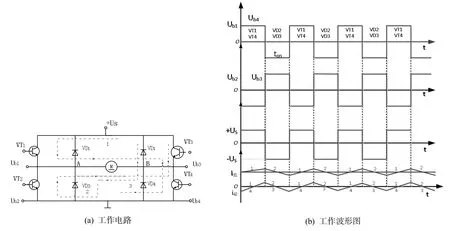
图2 双极式控制直流PWM-M变换器的电路和工作波形图
图 2(a)中所表示的电压UAB有两种呈现形式, 如同图2(b)中的id1和id2两种表现形式. 如果id1平均电流很大, 表示电动机负载较重的情况, 电机维持正方向转动, 工作在第一象限.id2平均电流小. 相当于电动机负载很轻的情况, 当续流阶段电流衰减到零时,VT2和VT3的c-e极两端失去反向电压, 在−US和电枢反电动势的共同作用下导通, 同时电枢电流反向同时沿回路3流通, 电机处于制动状态, 所以在0≤t≤ton期间, 电流也有一次倒向. 双极式控制直流PWM-H变换器的可逆体现在正、负脉冲宽窄上. 电机正转是在正脉冲较宽时. 当正脉冲较窄时, 平均电压为负, 电动机反转. 当正脉冲与负脉冲宽度相等时,, 平均电压为零, 电动机停止.
2.3 受限单极式直流PWM-M调速系统工作原理
受限单极式直流PWM-M调速与双极式直流PWM-M调速的工作电路完全一样, 区别只是它们两者之间的控制方式不同. 双极式直流PWM-M调速控制VT1、VT4和VT2、VT3成对导通. 受限单极式直流PWM-M调速控制在正转时VT1起PWM调速控制作用,VT4始终处于导通状态, 而VT2和VT3关断; 在反转时VT2作PWM控制,VT3始终处于导通状态, 而VT1和VT4关断. 因此在反转中, H桥的4个开关管中只有一个管子(VT1或VT2)处于PWM开关状态, 其他的三个管子状态不变, 这样不仅避免了H桥式同一个桥臂两个开关管的直接连通, 从而烧毁电源, 同时也减少开关管的开关损耗, 因此受限式控制直流PWM-M调速系统是最常用的调速方案.
3 两种PWM-M直流可逆调速系统的建模与仿真
3.1 双极式控制直流PWM-M调速系统仿真结果及分析
图3为双极式控制直流PWM调速系统在MATLAB/Simulink中的仿真模型, 它主要有直流电源、单相逆变器、直流电机、PWM发生器、转速调节器ASR和电流调节器等仿真模块[7,8]. 双极式控制直流PWM调速系统仿真结果如图4和图5所示, 其中图4(a)和(b)分别为双极式控制直流PWM-M调速系统整流器输出瞬时电压和输出平均电压的仿真波形. 从图4(a)和(b)可以看出调速系统当改变占空比Du时, 就可以改变输出电压的平均值, 从而可以改变直流电机电枢电压的平均值, 实现电机的调速. 图4 (c)为双极式控制直流PWM-M调速系统的电机转速仿真波形. 图4 (c)中所示的实线波形表示占空比Du为0.8的电机转速仿真波形, 虚线波形表示占空比Du为0.5时的转速仿真波形. 从图4(c)可知当改变占空比Du就可以比较容易的改变电机转速, 而且很容易看出当占空比增大时, 电机转速相应增大, 这与前面的理论分析完全一致.
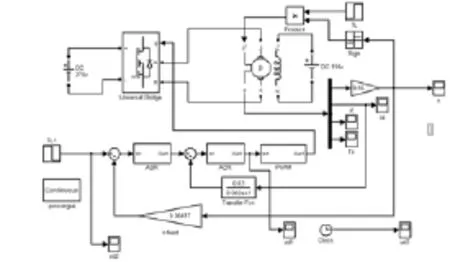
图3 双极式控制直流PWM-M调速系统的仿真模型
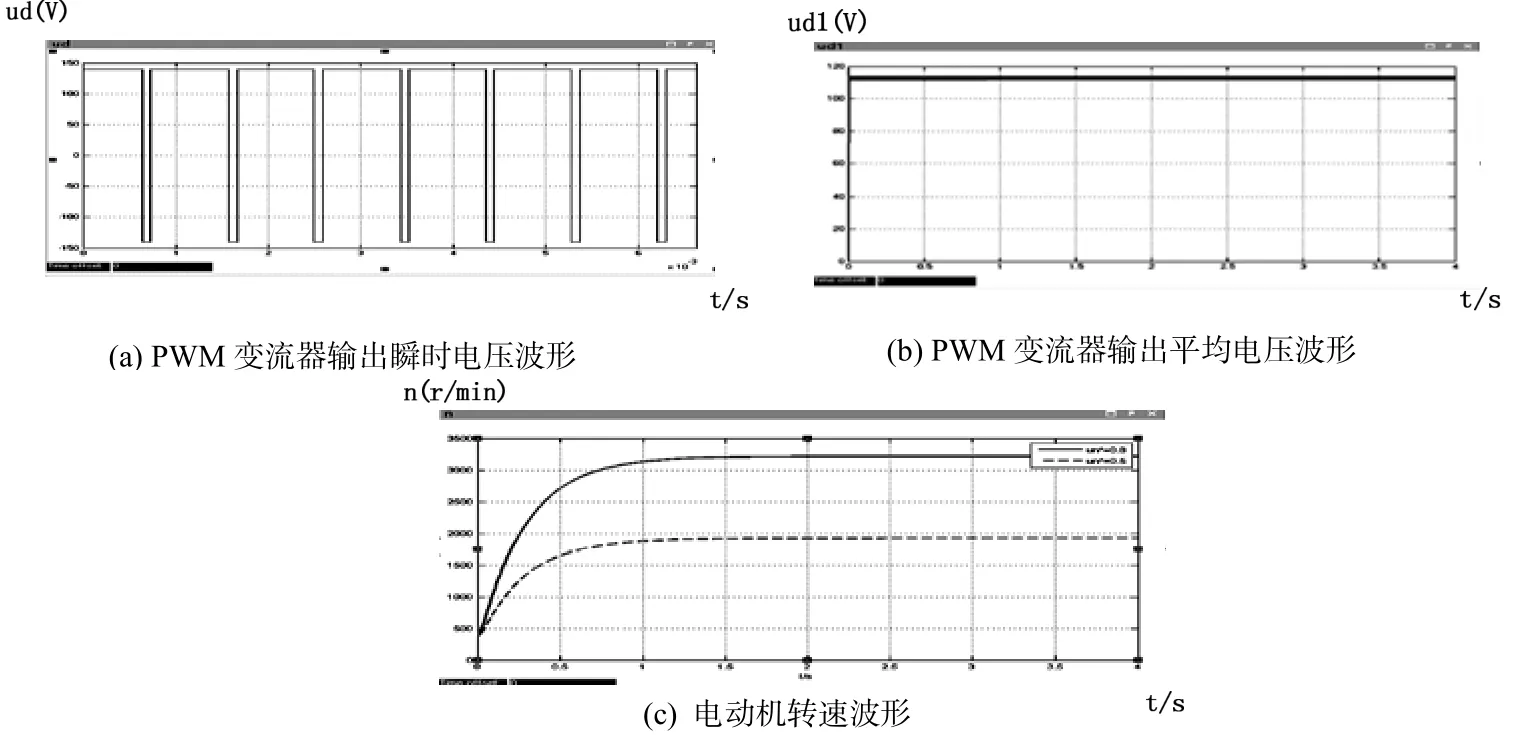
图4 双极式控制直流PWM-M调速系统的输出仿真波形
图5 为双极式直流控制PWM-M调速系统实现电机正反转的输出仿真波形, 其中图5(a)、 (b) 和(c)分别为输入控制信号、电机电枢电流以及电机转速仿真波形. 从图5(a)可以看出输入控制信号幅值为10V, 电压在1.5s从正+10V变化成−10V. 从图5 (b)可以看出电机电流随着控制信号电压方向改变, 电流方向在1.5s也立即发生改变, 为电机从正转到反转创造条件. 从图5(c)可以看出电机在0.7s左右达到稳定转速, 维持一段时间后, 当控制信号从+10V变化成−10V时, 电机的转速迅速下降, 降到零后在2.1s左右实现反转, 最终在3.1s左右达到稳定转速状态, 说明系统能够快速地实现电机正反转, 而且电机达到稳定状态的时间非常短, 说明调速系统的快速性和稳定性比较好, 这也是双极式控制直流PWM-M调速系统最大的优点.
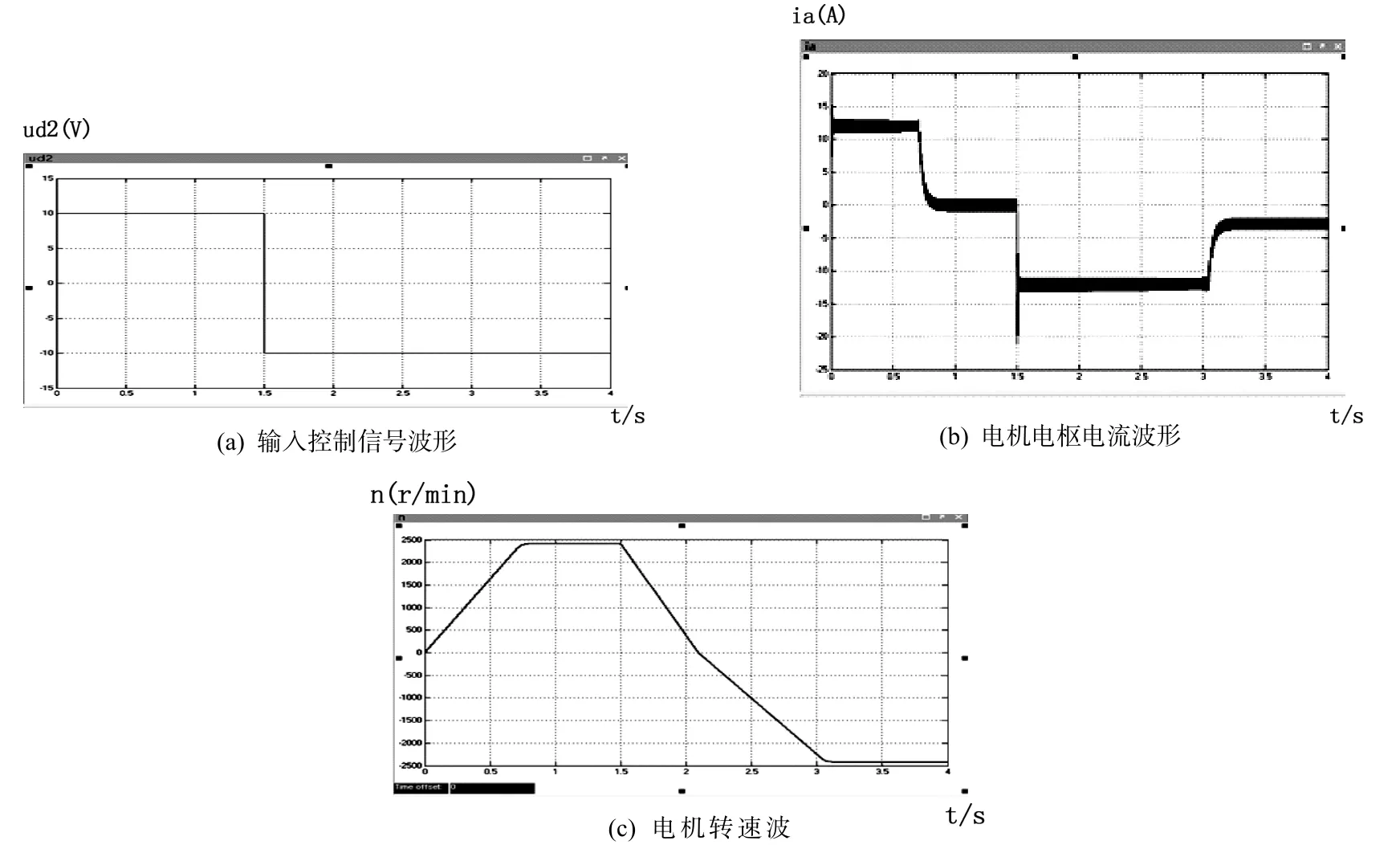
图5 双极式控制直流PWM-M调速系统实现电机正反转的输出仿真波形
3.2 受限单极式直流控制PWM-M调速系统仿真结果及分析
图6为受限单极式直流PWM-M调速系统在MATLAB/Simulink中的仿真模型, 其仿真模型的组成与图3仿真模型完全一样, 区别在于PWM控制模型设置不同. 受限单极式直流PWM-M调速系统的仿真结果如图7所示, 其中图7(a)和(b)分别为直流电机电枢电流以及电机转速仿真波形. 从图7可以看出受限单极式直流PWM-M调速系统的动态性能与双极式PWM-M调速系统几乎一样, 区别在于电机电枢电流毛刺更少, 波形更加平滑, 说明其调速稳定性明显优于双极式控制直流PWM-M调速控制系统.
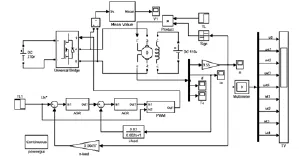
图6 受限单极式直流控制PWM-M调速系统的仿真模型
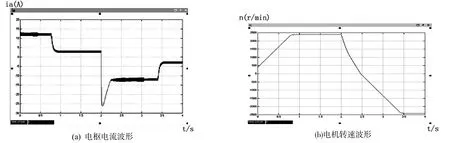
图7 受限单极式控制直流PWM-M调速系统输出仿真波形
4 结论
本文首先简要介绍了直流电机调速的基本方法以及改变电枢电压调速的基本原理, 然后根据PWM控制技术能够改变电机电枢电压详细介绍了双极式控制直流PWM-M调速和受限单极式直流PWM-M调速控制技术的工作原理, 并在MATLAB/Simulink中对两种调速系统进行了建模与仿真, 最后对仿真结果进行了比较分析. 仿真结果表明双极式控制直流PWM-M调速和受限单极式直流PWM-M调速系统都能是吸纳电机的正反转, 而且两个调速系统的动态和静态性能比较好, 两者都能保持电机电枢电流连续, 均可以实现电机的无极调速, 因此调速范围很大, 调速平滑性非常好. 两种调速的区别在于受限单极式直流PWM-M调速的稳定性比双极式控制直流PWM-M调速更优.
[1] 王 苏. 直流电机PWM 调速研究及单片机控制实现[J]. 机电工程技术, 2008, (37 )11: 82~84, 95
[2] 田红霞. 单周期控制直流电机双闭环调速系统设计[J]. 煤矿机械, 2014, 35(06): 24~25
[3] 曹荣敏, 侯忠生, 白雪峰. 基于无模型自适应控制方法的直流电机调速系统[J]. 电气传动, 2008, 38(7): 26~30
[4] 李永龙, 李祖枢, 王 牛. 直流电机双闭环调速系统(DLM)的建模与辨识[J]. 控制理论与应用, 2008, 25(6): 1077~1080
[5] 王兆安, 黄 俊. 电力电子技术[M]. 第5版. 北京: 机械工业出版社, 2009
[6] 唐 介. 电机与拖动[M]. 第2版. 北京: 高等教育出版社, 2007
[7] 方 炜, 张 辉, 刘晓东. 无刷直流电机双闭环控制系统的设计[J]. 电源学报, 2014, 3(2): 35~42
[8] 谢志诚, 李益华, 林利红. 无刷直流电机双闭环控制系统的建模与仿真[J]. 计算技术与自动化, 2009, 28(3): 41~44
Comparative Study of Two Kinds of DC PWM-M Reversible Regulating Speed System
LI Yi-ming1, DENG Bin1, RONG Jun2, YI Xue-liang1
(1. College of Computer Science, Hunan Institute of Science and Technology, Yueyang 414006, China; 2. College of Information and Communication Engineering, Hunan Institute of Science and Technology, Yueyang 414006, China)
DC motor with excellent starting, speeding and braking performance is widely used in the field of DC regulating speed. Two kinds of regulating speed control system for DC PWM-M are studied, and their working principles are analyzed, and the modeling and simulation of them are carried out based on Matlab/Simulink. Finally, the simulation results are compared and analyzed, and the simulation results show that the control system of bipolar PWM-M regulating speed and the restricted unipolar PWM-M regulating speed have excellent dynamic and static characteristics, and they can all realize forward and reverse, and can also realize stepless regulating speed for DC motor. The difference is that the stability of the restricted unipolar PWM-H regulating speed system is better than the bipolar PWM-M regulating speed system.
DC regulation speed; bipolar PWM-M regulating speed; restricted unipolar PWM-M regulating speed; modeling and simulation
TP341
: A
: 1672-5298(2015)04-0041-05
2015-09-29
湖南省普通高校教学研究改革项目 (湘教通[2015]291号)
李一鸣(1979− ), 女, 湖南岳阳人, 硕士, 湖南理工学院计算机学院讲师. 主要研究方向: 计算机硬件技术和仿真技术
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
火力与指挥控制(2022年5期)2022-07-25 03:50:10
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
电子制作(2017年1期)2017-05-17 03:54:12
军事文摘·科学少年(2017年2期)2017-04-26 21:54:37
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
现代检验医学杂志(2015年5期)2015-02-06 01:42:20
物理与工程(2014年5期)2014-02-27 11:23:14