
机器人在飞机蒙皮荧光渗透静电喷涂检测中的应用
2015-05-31 06:44:18沈阳新松机器人自动化股份有限公司皮景峰
航空制造技术 2015年13期
沈阳新松机器人自动化股份有限公司 皮景峰 刘 洋
在民用飞机中,为了检测对零件强度影响较大的表面开口缺陷,无损检测方法——涂荧光渗透检测被广泛应用。对于小尺寸、批量零件可采用常见的侵入法检测或人工静电喷涂荧光渗透检测,而对于大型零件如飞机蒙皮、发动机风扇框架、压力机机匣、涡轮宽肩等大尺寸、复杂型面的零件更适合采用机器人静电喷涂荧光渗透检测。
沈阳新松机器人自动化股份有限公司为了满足飞机铝及铝合金蒙皮等大型复杂形状零件检测的要求,采用双直角坐标机器人和SAMES自动静电喷涂设备,设计制造了机器人荧光渗透静电喷涂检测生产线,此项目的实施会对未来的生产带来深远的影响。
荧光渗透静电喷涂检测简介
1 荧光渗透检测
渗透检测是基于液体的毛细作用(或毛细现象)和固体染料在一定条件下的发光现象。
渗透检测的工作原理是:工件表面被施涂含有荧光染料或者着色染料的渗透剂后,在毛细作用下,经过一定时间,渗透剂可以渗入表面开口缺陷中;去除工作表面多余的渗透剂,经过干燥后,再在工件表面施涂吸附介质——显像剂;同样在毛细作用下,显像剂将吸引缺陷中的渗透剂,即渗透剂回渗到显像中;在一定的光源下(黑光或白光),缺陷处的渗透剂痕迹被显示(黄绿色荧光或鲜艳红色),从而探测出缺陷的形貌及分布状态。
根据飞机蒙皮荧光渗透静电喷涂检测要求选择水洗型荧光渗透检测(干粉显像),查表1代号为:I A- a,可显示的裂纹区位数为3,查表2灵敏度等级为3级。
2 静电喷涂
静电喷涂是利用高压静电电场使带负电的涂料微粒沿着电场相反方向定向运动,并将涂料微粒吸附在工件表面的一种喷涂方法。静电喷涂设备由喷枪、喷杯以及静电喷涂高压电源等组成。

表1 渗透检测方法分类

表2 灵敏度等级
如图1所示,工作时静电喷涂的喷枪(或喷盘、喷杯),涂料微粒部分接负极,工件接正极并接地,在高压电源的高电压作用下,喷枪(或喷盘、喷杯)的端部与工件之间就形成一个静电场。涂料微粒所受到的电场力与静电场的电压和涂料微粒的带电量成正比,而与喷枪和工件间的距离成反比,当电压足够高时,喷枪端部附近区域形成空气电离区,空气激烈地离子化和发热,使喷枪端部锐边或极针周围形成一个暗红色的晕圈,在黑暗中能明显看见,这时空气产生强烈的电晕放电。

图1 静电喷涂原理
涂料经喷嘴雾化后喷出,被雾化的涂料微粒通过枪口的极针(或喷盘、喷杯)的边缘时因接触而带电,当经过电晕放电所产生的气体电离区时,将再一次增加其表面电荷密度。这些带负电荷的涂料微粒的静电场作用下,向导极性的工件表面运动,并被沉积在工件表面上形成均匀的涂膜。
荧光渗透静电喷涂生产线组成
1 设备概述
如图2所示,荧光渗透静电喷涂生产线分为两个车间,即荧光渗透喷涂车间和检验车间,两个车间通过厂房自动门进行物理分隔。在荧光渗透喷涂车间内配置一套电控系统、一个操作台、两台防爆直角坐标机器人、两套静电喷涂系统、两套喷淋装置、两套干燥装置。为了保持荧光渗透喷涂车间的洁净配有排送风过滤系统和地面导流装置。
荧光渗透静电喷涂生产线分为自动工作和手动工作两个工作模式,自动模式功能包括自动静电喷涂渗透液、自动喷淋清洗、自动热风干燥、自动喷涂显像粉;手动模式功能包括设备调试和工件位置设定与校验。
工件在荧光渗透喷涂车间静电喷涂完成后,通过天链运输到检验车间,在检验车间进行工件缺陷检测。
2 防爆直角坐标机器人组成及功能
防爆直角坐标机器人能够在爆炸性环境下实现自动控制、可重复编程、末端操作器的位置在3个自由度内可编程的工业自动化设备。这里自由度就是指可运动或转动的轴。直角坐标机器人是以直线运动轴为主,各个运动轴通常对应直角坐标系中的X轴、Y轴和Z轴。
如图3所示,防爆直角坐标机器人由机械系统、电控系统和驱动系统、操作工具等组成。
根据飞机蒙皮荧光渗透静电喷涂检测要求, 需要对大型复杂型面飞机蒙皮等板类零件双面同时工作,机器人分别配备荧光渗透液静电喷枪、热水喷头、热风喷嘴和干粉显像剂静电喷枪,重量大约10kg,并且工作环境为爆炸性环境,因此直角坐标机器人需要防爆并成对使用,完成自动静电喷涂渗透液、自动喷淋清洗工件表面、自动热风干燥工件表面、自动喷涂显像粉等工艺过程。

图2 设备布置图
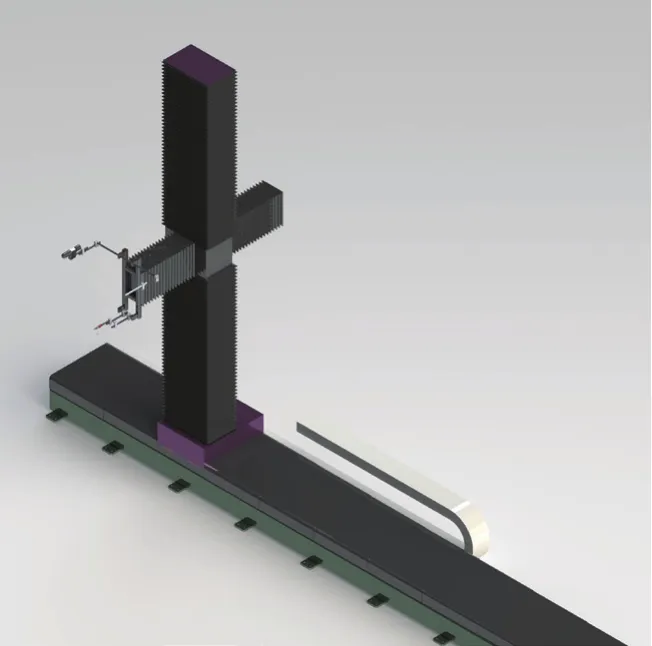
图3 防爆直角坐标机器人
3 防爆直角坐标机器人防爆处理
(1)零部件防爆。全部电气器件满足防爆环境使用要求,其中总电控柜采用机械隔离方式,接近开关和磁性开关采用本质安全型,电磁阀采用隔爆型,器件均带有防爆环境使用认证,保证器件出现故障时不会对所处的外在环境造成危害。整个电气系统按照《爆炸性环境》的要求设计执行,满足防爆环境的使用标准。
(2)防静电。线体全部采用防静电材质及金属材质制造,能够不产生静电或者能够将工作过程中产生的少量静电瞬间导出,保证危险品附近电荷向大地释放,从而使电荷立即消失。设备配套安装静电接地报警器实时检测静电电流,基本原理是通过金属导体使整个设备与大地接触,静电接地报警器采用性能可靠的集成电路,防静电及报警性能稳定可靠,从设备末端到接地桩整个接地回路电阻自动监测,阻值超过预定值或当夹体有一方接触不良时,立即做出报警反应,报警电流为25mA,从设备末端到接地桩整个接地回路电阻自动检测阻值60欧姆。接地装置宜采用钢材,角钢及钢管接地体应垂直配置,接地体顶面埋设深度应不宜小于0.6m,除接地体外,接地体引出线的垂直部分和接地装置焊接部位应作防腐处理,接地线最小截面积为6mm2的绝缘导线,垂直接地体的间距不宜小于5m。
(3)防漏电。对电控柜内主要回路进行漏电监控,为各回路断路器配套漏电检测附件,基本工作原理是使用一个电子式继电器,将泄漏电流的电信号与预设值30mA相比较,看是否达到跳闸限值,一旦泄露电流超限,跳闸机构动作,回路呈断开状态。任意支路发生跳闸,总回路断路器同时跳闸,整个系统断电,避免发生漏电事故以及可能由此引发的人身伤亡和火灾事故。
机器人系统编程及应用
1 离线编程的优点
机器人是一个可编程的机械装置,其功能的灵活性和智能性很大程度上决定于机器人的编程能力。机器入编程方式可分为示教再现编程和离线编程。
目前,在国内外生产中应用的机器人系统大多为示教再现型。示教再现型机器人在实际生产应用中存在的主要技术问题有:机器人的在线示教编程过程繁琐、效率低;示教的精度完全靠示教者的经验目测决定,对于复杂路径难以取得令人满意的示教结果;对于一些需要根据外部信息进行实时决策的应用无能为力。而离线编程系统可以简化机器人编程进程,提高编程效率,是实现系统集成的必要的软件支撑系统。与示教编程相比,离线编程系统具有如下优点:减少机器人停机的时间,当对下一个任务进行编程时,机器人可仍在生产线上工作;使编程者远离危险的工作环境,改善编程环境;离线编程系统使用范围广,可以对各种机器人进行编程,并能方便地实现优化编程;便于和CAD/CAM系统结合,做CAD/CAM/ROBOTICS一体化;可使用高级计算机编程语言对复杂任务进行编程;便于修改机器人程序[1]。
2 离线编程的过程
离线编程系统是利用计算机图形学的成果,建立起机器人及其工作环境的几何模型,再利用一些规划算法,通过对图形的控制和操作,在离线的情况下进行轨迹规划。通过对编程结果进行三维图形动画仿真[2],以检验编程的正确性,最后将生成的代码传到机器人控制柜,以控制机器人运动,完成给定任务。
机器人离线编程系统不但要在计算机上建立起机器人系统的物理模型,而且要对其进行编程和动画仿真,以及对编程结果后置处理,如图4所示。
(1)CAD建模。CAD建模需要完成以下任务:零件建模;设备建模;系统设计和布置;几何模型图形处理。因为利用现有的CAD数据及机器人理论结构参数所构建的机器人模型与实际模型之间存在着误差,所以必须对机器人进行标定,对其误差进行测量、分析及不断校正所建模型。
(2)图形仿真。离线编程系统的一个重要作用是离线调试程序,而离线调试最直观有效的方法是在不接触实际机器人及其工作环境的情况下,利用图形仿真技术模拟机器人的作业过程,提供一个与机器人进行交互作用的虚拟环境。计算机图形仿真是机器人离线编程系统的重要组成部分,它将机器人仿真的结果以图形的形式显示出来,直观地显示出机器人的运动状况,从而可以得到从数据曲线或数据本身难以分析出来的许多重要信息,离线编程的效果正是通过这个模块来验证的。
(3)编程。编程模块一般包括:机器人及设备的作业任务描述(包括路径点的设定)、建立变换方程、求解未知矩阵及编制任务程序等。在进行图形仿真以后,根据动态仿真的结果,对程序做适当的修正,以达到满意效果,最后在线控制机器人运动以完成作业。
(4)后置处理。后置处理的主要任务是把离线编程的源程序编译为机器人控制系统能够识别的目标程序,即当作业程序的仿真结果完全达到作业的要求后,将该作业程序转换成目标机器人的控制程序和数据,并通过通信接口下装到目标机器人控制柜,驱动机器人去完成指定任务[3]。

图4 双机器人轨迹
3 双机器人协调运动
在工业自动化和柔性生产中,存在这样一些情况,比如,在处理诸如装配复杂工件、搬运大型物体、喷涂等任务中,单机器人所表现出来的能力略显不足,因而双机器人乃至多机器人系统正逐渐被应用到各个领域中。这种变化不但能提高机器人自身的利用率,增加产量,而且能最大限度发挥机器人系统的工作潜能,提高机器人的多用途性。另外,双机器人协调工作,可减少机器人的复杂性。现阶段,对于双机器人协调系统主要集中于两个方面∶松协调和紧协调。前者是指两个机器人未形成共同抓取前的无碰撞轨迹规划问题,后者指两个机器人抓取同一物体形成闭环后的协调运动控制问题。
据此荧光渗透静电喷涂为松协调,即双机器人空间复制边缘无接触的跟踪,通过确定双机器人协调运动的约束关系,然后将这一系列的约束关系作用到机器人末端操作器上,从而获得机器人协调运动的位置和姿态,如图5所示。

图5 双机器人协调运动
在进行荧光渗透静电喷涂时,工件固定,工件两侧两机器人都进行喷涂作业,即从机器人根据主机器人末端位姿态进行跟随协调运动。双面双机器人喷涂采用主从协调控制策略,根据主机器人末端位置和姿态,以工件基准路径平面为对称面,经过运动学坐标变换,从而控制从机器人跟随主机器人协调运动,实现了双面双喷涂机器人喷涂[4]。
结 论
采用机器人离线编程和协调运动策略的机器人荧光渗透静电喷涂检测适用于航空行业多品种小批量大型复杂型面飞机蒙皮等板类零件的生产。此项技术的应用将提高产品质量、降低成本、减少生产工艺规划时间、提供生产效率,使操作员远离危险的工作环境 ,对航空业的生产有重要意义。
[1]赵东渡,熊有伦.机器人离线编程研究 .机器人,1997(4):75-81.
[2]赵东波,熊有伦.面向对象机器人离线编程系统的设计准则.机器人,1997(6):2-7.
[3]刘振宇,徐方.一种通用的机器人三维图形仿真的实现机器人,2001(5)∶4904-406.
[4]张华军,张广军,蔡春波,等. 双面双弧焊机器人主从协调运动控制.焊接学报,2011,32(1):25-28.
猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26 14:31:10
中学生数理化·七年级数学人教版(2022年4期)2022-04-26 14:31:04
防爆电机(2021年4期)2021-07-28 07:42:46
中学生数理化·七年级数学人教版(2021年4期)2021-07-22 03:15:58
中国特种设备安全(2021年11期)2021-05-05 06:13:18
能源工程(2021年1期)2021-04-13 02:05:56
铁道通信信号(2020年6期)2020-09-21 09:23:34
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
中成药(2018年2期)2018-05-09 07:20:09
酒·饮料技术装备(2018年1期)2018-04-28 09:09:02
