四旋翼飞行器三维防撞系统设计
2015-05-30 13:19:46陈谣黎嘉明葛旭文陈根华
科技资讯 2015年26期
陈谣 黎嘉明 葛旭文 陈根华
摘要:随着无人飞行器技术的发展,四旋翼飞行器得到广泛应用。但在实际工程应用中,当外部飞行环境比较复杂或自主飞行时,容易造成飞行器的不平稳,从而导致飞行器与外部环境发生碰撞,造成无人飞行器的损毁。因此,设计具有自动防撞系统的无人飞行器具有重要工程意义。该系统以HC-SR04超声波模块作为测距传感器,以MK60FX512VLQ15作为控制单元,实现数据采集、显示及信号控制,选用CD4066多路模拟开关进行无人机运动方向的控制,实现四旋翼飞行器的防撞功能。本系统已成功应用于某商用无人机的防撞保护。
关键词:四旋翼飞行器;MK60FX512VLQ15单片机;三维防撞
中图分类号:TP332.3文献标识码:A 文章编号:1672-3791(2015)09(b)-0000-00
随着科技的发展,四旋翼飞行器凭借其便捷性,得到了广泛应用。普通四旋翼飞行器在实际应用中,可能会遇到因内部条件及外部环境影响,造成飞行不平稳,或者因操作失误使飞行器发生碰撞的问题。市场上绝大部分四旋翼飞行器,采用硬件保护措施,对易损部件进行特殊保护,因此,不仅增加飞行器重量、降低续航时间,而且飞行器在遇到强碰撞时,仍然导致飞行器严重损坏。
本文提出了一种安全距离可调的四旋翼飞行器[1]三维防撞系统。当飞行器某一方向上的距离小于安全距离时,迫使飞行器自动悬停,遥控器只能使飞行器朝反方向运动,并通过声光报警告知操控者。本系统采用MK60FX512VLQ15为主控,HC-SR04超声波模块[2]为测距传感器,实现三维距离测量、自动悬停控制、超安全范围自动报警等功能。该系统具有实用、方便、稳定等优点。
1硬件系统设计
1.1系统工作原理
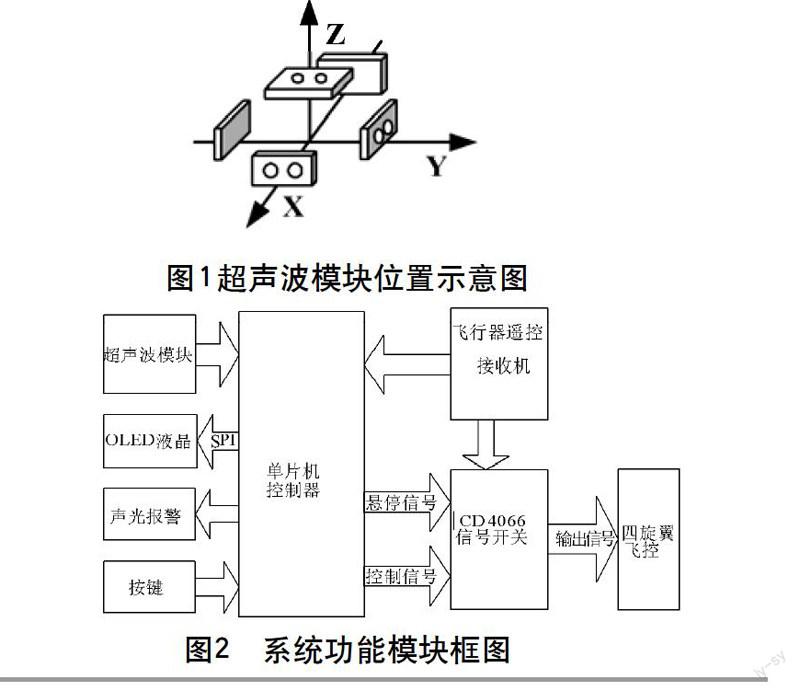
本系统采用5个HC-SR04超声波模块,对三维距离进行测量,HC-SR04超声波位置示意图如图1所示。
通过采集5个方向上超声波的距离信息,实时得到飞行器的距离信息,从而判断飞行器是否处于安全范围。选用CD4066多路模拟开关,对飞行器接收机各控制方向PWM信号和单片机模拟悬停的PWM信号进行控制,控制单元以MK60FX512VLQ15单片机[3]作为控制器,对四旋翼飞行器接收机PWM信号频率进行分析与计算、控制CD4066模拟悬停信号与接收机信号开关、声光报警、数据显示、按键消息处理等任务。数据显示采用SPI总线接口与MzL05T-12864模组[3]实现。系统功能框图如图2所示。
图1 超声波模块位置示意图 图2 系统功能模块框图
1.2 HC-SR04超声波模块
距离测量传感器采用高精度HC-SR04超声波模块。该模块可实现2cm~400cm的距离测量,精度高达3mm,该模块发出8个40kHz脉冲信号并检测回波。一旦检测到回波信号则输出回响信号,从而测量出实际距离,具体计算公式为距离=回响信号高电平时间×声速/2。
1.3 信号开关器
本系统采用双向模拟开关CD4066,可传输的模拟信号的上限频率为40MHz,各开关间的串扰小, 每个模拟开关有输入、输出、控制三个端口。当控制端加高电平时,开关导通;当控制端加低电平时,开关截止。利用CD4066作为信号开关器,对各方向模拟悬停信号以及接收机各方向发送信号进行处理。
1.4液晶显示
为实现友好的人机交互,本系统采用OLED12864实现液晶显示[4],使操控者在调试时更直观地观察和设置飞行器各方向的信号参数以及安全距离参数。
1.5键盘输入模块
本设计采用按键调节系统参数,用于系统安全距离设置以及用户模式切换。
2软件设计
系统初次启动时,进入预设界面,显示用户模式以及安全距离,当操控者成功预设操作模式及安全距离后,显示器显示飞行器各方向信号参数、模拟信号参数以及各方向超声波所测距离,此时,飞行器处于待飞状态。在待飞状态下,操控者可通过按键使系统回到预设界面调节参数。
飞行器起飞后,各方向超声波实时监测距离[5],判断各方向是否小于安全距离。若各方向大于安全距离,飞行器正常接收信号;若某方向小于安全距离,系统自动切换为悬停信号,使飞行器自动悬停,同时声光报警发出告警信号警示操控者。
3结束语
本文设计的四旋翼飞行器三维防撞系统摒弃了传统的硬件保护措施,实现四旋翼飞行器的软件安全保护措施,适用于各主流飞控,满足当前飞行器的安全保障需求,避免了操控者视觉误判或外部环境复杂而导致的飞行器碰撞事故,为四旋翼飞行器在复杂危险领域的应用提供了安全保障,给广大飞行器爱好者带来巨大的经济与社会效益。
参考文献
[1] 聂博文.微小型四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007,14(6): 113-117.
[2] 苏琳.基于HC-SR04的超声波测距器的设计[J]. 科技信息.124-125,2012.09.
[3]张毅刚, 彭喜元, 彭宇.单片机原理及应用[M]. 北京: 高等教育出版社, 2010.
[4]楼然苗,李光飞.单片机课程设计指导[M]. 北京:北京航空航天大学出版社,2007.
[5]郭清.基于STC89C52 的超声波测距防撞系统设计[J].仪表技术与传感器,2011,6: 74-77.
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
汽车工程师(2018年1期)2018-07-13 00:47:56
电子制作(2018年2期)2018-04-18 07:13:25
中国公路(2017年13期)2017-02-06 03:16:33
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
民用飞机设计与研究(2015年3期)2015-12-07 12:09:31