
基于PLC的气动抓取式工业机械手设计研究
2015-05-30 05:06:04平艳玲刘波
科技创新与应用 2015年30期
平艳玲 刘波
摘 要:机械手在设计过程中,注重其自动化控制,能够实现一些较为复杂的工业操作。文章对气动抓取式工业机械手设计的研究,主要是基于PLC自动化控制下的抓取式机械手的设计分析,注重提升机械手的灵活性和智能性,以期更好地实现工业发展自动化。
关键词:PLC控制;工业机械手;设计研究
前言
工业生产领域中,很多工业操作靠人工是无法完成的,并且,一些操作具有较大的危害性,因此,要想实现工业生产目标,保证工人施工安全,工业机械手得到了较为广泛的应用。工业机械手可以进行一些高温、有毒环境下的工业生产,极大程度上保证了工人安全,同时也在很大程度上减缓了工人的劳动强度。基于PLC的气动抓取式工业机械手设计,将注重相关程序的具体应用,注重把握机械手设计的灵活性和自动性特征,通过一系列编程控制,更好地实现机械手的实际效用。PLC气动抓取式机械手,具有较高的可靠性,并且编程简单、功能强大,延伸和扩大了人的手足和大脑功能,更加广泛地应用于工业生产中。
1 气动抓取式工业机械手的构成分析
基于PLC的气动抓取式工业机械手设计,需要具有较高的灵活性和自动化发展特征,能够根据相应的程序设计,满足实际生产需要。因此,在进行设计过程中,气动抓取式工业机械手应包含以下几部分:执行机构:执行机构是气动抓取式工业机械手的重要组成部分,包括了手部、手腕、手臂和立柱等部件,是机械手完成生产目的的关键部分;气动驱动系统:气动驱动系统是指挥机械手完成工业生产的重要部分,利用气体压力进行驱动,使机械手完成任务;控制系统:控制系统相当于机械手的大脑,对机械手执行任务进行指令下达。一般来说,气动抓取式工业机械手的控制系统,主要以PLC自动化工业控制系统为主;相关检测装置:检测装置是进行位置调节的装置,通过检测装置可以更好地确定抓取目标,为实现抓取目的提供依据。机械手的构成,以PLC控制系统进行指令下达,之后由气动驱动系统进行机械能传输,使执行机构能够进行实际行动,并且根据位置检测装置,进行目标操作[1]。
2 基于PLC的气动抓取式工业机械手设计研究
2.1 设计要点
基于PLC的气动抓取式工业机械手在设计过程中,要注重机械手的抓取性能,在实际工作中,能够实现快、准、狠的工作效果。机械手设计过程中,手臂的运行方式有所不同,在进行手臂设计时,需要考虑到生产的实际情况,使机械手设计能够与生产实际状况符合。关于PLC气动抓取式工业机械手设计,要把握以下几点:第一,机械手臂设计时,坐标可分为直角坐标式、球坐标式、关节式等方式。第二,手臂的升降、收缩和回转运动要保证灵活性,能够较好地适应生产和抓取情况。第三,手臂的上下升降、左右旋转、上下摆动动作要具有较好的灵活性。第四,手臂要保证五个自由度,符合抓取需要。
2.2 设计方案
文章对基于PLC的气动抓取式工业机械手的设计研究,将从手指、手腕、手臂、三个方面进行。
手指设计分析:机械手在设计过程中,要具有较好的通用性能,能够进行有效的更换,以实现设计的效率性和多用性。手指在设计过程中,主要以气动抓取方式为主。气动机械手是用压缩空气为动力源的机械手。其特点是方便、输出力小、气动迅速。但是由于空气的可压缩性使其运送过程不稳定,抓取力控制在三十公斤以下。手指设计时,要有足够的握力并且手指间具有对应的开闭角,能够对工件进行准确定位。
手腕设计分析:手腕设计时,同样要以生产实际需要为主,手腕要具有较好的灵活性,更好地满足生产需要。设计时,若是抓取的物件是水平放置,则可以设置成为上下摆动的形式即可,若是抓取物件存在一定的复杂性,就需要将手腕设计成“球坐标式”,能够进行有效地活动,从而完成抓取工作[2]。
手臂设计分析:机械手臂在设计过程中,要保证其具有较大的灵活性。手臂是进行抓取工作的重要设计点,其速度关系到了机械手手指的抓取速度,文章对机械手臂的设计参数为最大移动速度为1.0m/s,回转速度为90°/s,移动速度为0.8m/s。手臂设计要具有速度性,它是实现抓取效率的关键部位。
2.3 控制设计
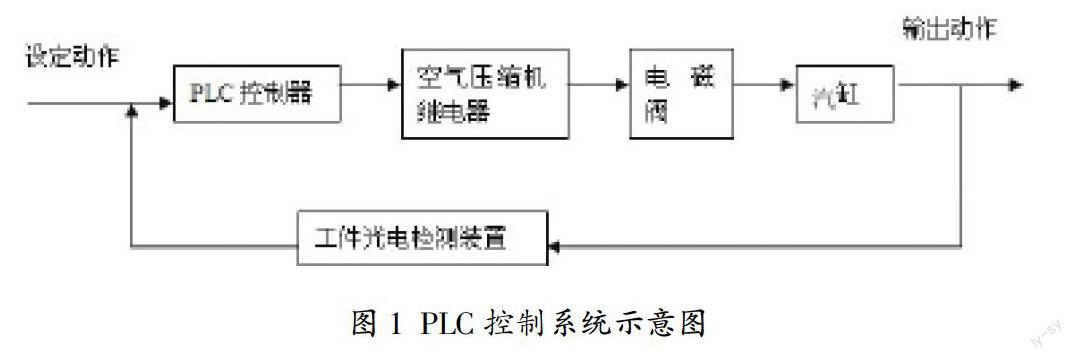
控制设计是基于PLC的气动抓取式机械手设计的难点,具有较大的复杂性,同时,控制设计也关系到了机械手能否发挥真正的作用。在控制设计过程中,需要考虑到机械手的通用性,并且采用点位控制方式,实现精确控制。控制设计时,要注重PLC工业自动化控制系统的应用。关于利用PLC自动化控制系统进行机械手控制的问题,如图1所示[3]。
PLC在实现这一目标时,需要通过程序编制,并且对程序进行执行处理,才能实现。PLC应用于气动抓取式机械手设计时,主要涉及到了以下设备装置:中央处理器、系统存储器、用户存储器、电源、编程器五大部分。这五个部分当中,中央处理器是PLC系统的核心,对气动抓取式机械手进行控制,电源、线路是实现PLC系统进行相关程序操作的关键。同时,编程器、系统存储器、用户存储器之间,需要通过I/O信号输入,才能实现效果。
PLC控制作用发挥时,需要事先有PLC系统进行命令发布,并且通过总机的数据处理系统,将指令进行传达,实现信号输送。关于PLC的气动抓取式机械手的工作情况,主要如下:机械手位于初始位置,受到控制系统控制,执行系统将推动机械手进行运动。同时,机械手各个主要部位受到执行系统控制,执行系统通过完成主系统下达的任务,进行机械手控制,完成机械手操作任务。基于PLC的气动抓取式工业机械手设计,将更加广泛的应用于自动化生产线。国外很多国家已将其成功的应用于成套的自动化生产设备中。机械手未来的发展,将朝着自动化、智能化、网络化的发展方向迈进,将更好的代替人从事高危险、高危害的工作环境,实现生产管理的智能化和自动化。
3 结束语
综上所述,文章主要分析了基于PLC的气动抓取式机械手的设计原理、设计方案、控制设计三个部分内容,并就气动抓取式机械手的特点进行了分析,实现了气动抓取式机械手的设计。气动抓取式机械手在工业生产过程中起到了重要的辅助作用,在实际设计过程中,必须注重这一点,使机械手设计能够更好地促进工业生产的发展和进步,满足我国现代工业更加自动化、智能化的发展需要。
参考文献
[1]蒋浩.基于PLC的工业机械手运动控制系统设计[D].南京信息工程大学,2012.
[2]张海英.基于PLC的气动吸盘式工业机械手设计[J].液压气动与密封,2013,3:74-76.
[3]程锦锋.基于PLC控制及气动驱动的工业机械手的设计与实现[J].职业,2013,9:99-102.
[4]孙燕良,张厚江,翟艳凤,等.基于PLC气动机械手的研究设计[J].森林工程,2011,3:45-50.
猜你喜欢
建筑建材装饰(2016年11期)2016-12-29 19:13:49
科技创新与应用(2016年34期)2016-12-23 18:52:54
科学与财富(2016年18期)2016-12-22 17:51:16
电子技术与软件工程(2016年19期)2016-12-19 18:49:35
北方文学·中旬(2016年9期)2016-12-08 12:07:31
中国科技纵横(2016年17期)2016-11-30 21:39:20
继续教育(2016年11期)2016-11-24 20:05:00
数字技术与应用(2016年9期)2016-11-09 23:36:50
数字技术与应用(2016年9期)2016-11-09 22:09:07
文艺生活·下旬刊(2016年10期)2016-11-03 00:02:16
