
旱田移栽机机械手自动喂苗系统
2015-05-30 07:12:32陈志超马国超唐钰璇朱俊华果莉
科技创新导报 2015年35期
陈志超 马国超 唐钰璇 朱俊华 果莉


摘 要:旱田移栽机机械手自动喂苗系统主要由育秧盘传送带,机械手,MSP430单片机,电动机等组成。其在当前半自动移栽机的基础上融入了电子技术,走机电一体化的路线,研究和开发全自动移栽机。该系统采用了可伸缩并有拾取功能的机械手和卡位式轮回传送带,并用微控制器MSP430对其进行反馈控制,使该系统能够准确拾取秧苗,及时对移栽机进行“喂”苗,同时避免了育秧盘下滑或者遮挡住了旱田秧苗移栽机的入苗口而造成的机械手不能正常“喂”苗的情况,保证了秧苗的成活率。该研究对促进我国农业自动化水平的进展,保障我国农村种植行业持续发展有重要意义。
关键词:机械手 全自动 喂苗 成活率
中图分类号:S223.9 文献标识码:A 文章编号:1674-098X(2015)12(b)-0137-02
我国是农业大国,随着农业现代化发展,耕作机械行业为我国种植业发展提供了大量的机具装备。新型耕种机械作为农业实用技术的载体,有力地促进了农业耕种新技术的发展,旱地移栽机就是其中一种。旱地移栽机取代了手工种植,减少种植的时间,提高了工作效率。现阶段研制和使用多为半自动移栽机,每台机械需2~3名喂苗人员,人工喂苗速度有限,且作业效率低,不适合短时间内完成大面积移栽,不符合当前我国农村劳动力缺乏的现状。劳动强度大、移栽速度慢和劳动力紧张是半自动移栽机较为突出的问题。为了解决这严重的问题,以促进我国农业自动化水平的进展,该系统研究和开发全自动移栽机,提高劳动效率,提高育苗的成活率。
1 系统总体设计
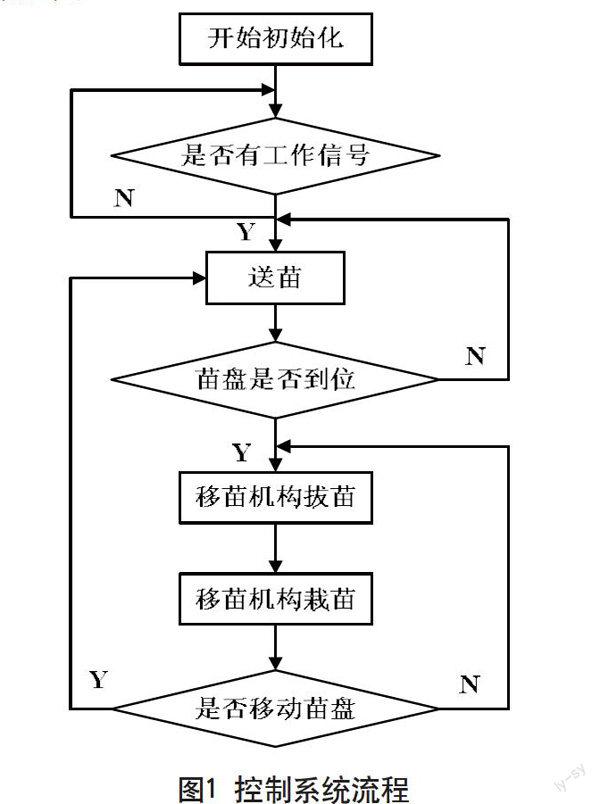
系统由机械部分和控制部分构成。其中机械部分由育秧盘传送带、机械手等组成。育秧盘传送带将育秧盘准确地送到指定位置供机械手进行操作。机械手自动定位育秧盘的位置,将盘中的秧苗拾取并送入秧苗入苗口。控制部分由单片机、触力传感器、交流伺服电机等组成。单片机负责处理整个系统采集到的信号,并按照预置的指令控制系统内其他部分进行相应的动作。触力传感器监测机械手是否拾取到秧苗并将信号反馈回单片机。直流电动机带动育秧盘循环滚动进行送苗工作。图1为系统流程图。
2 系统硬件设计
2.1 机械部分硬件设计
育秧盘是栽苗机必不可少的一部分,而带动育秧盘的传送带则承担着连续不断的运送任务。传送带设备选择具有牵引件的传送带,该设备的结构特点是:被运送物料装在与牵引件连结在一起的承载构件内,或直接装在牵引件(如传送带)上,牵引件绕过各滚筒或链轮首尾相连,形成包括运送物料的有载分支和不运送物料的无载分支的闭合环路,利用牵引件的连续运动输送物料。其结构特点十分符合栽苗机所需的物理结构。其运行可靠、动力消耗低、适应性强且十分灵活。传送带采用卡位式轮回传送带,能有效的保证机械手准确拾取秧苗,同时也防止了育秧盘下滑或者遮挡住了栽苗机的入苗口而造成的机械手不能正常喂苗。
该系统采用4自由度机械手进行工作。在该系统中,采用平面固定机构,配合轴承进行缓冲。机械手的金属结构支架采用硬铝合金制成,该材料重量轻、强度高,完全能够适应栽苗时机械手的快速移动。在机械臂的重要受力关节,采用大扭力的金属齿轮数字舵机。该数字舵机响应快、扭力大、噪音小。故此机械手可以胜任各种取苗以及喂苗动作。
2.2 控制部分硬件设计
在该系统中,作为控制器的单片机负责接收系统中触力传感器的信息,并控制机械手臂进行相应的动作。该系统选用MSP430单片机,它是一种超低功耗、高性能16位单片机。具有强大的处理能力、集成度高、可靠性强,具有极高的性价比[1]。
触力传感器镶嵌在机械手上,其负责检测机械手是否抓取到秧苗和抓取秧苗的力度并将信号反馈至单片机,从而单片机对机械手抓取的力度进行控制。该系统选用的为FS系列触力传感器,该传感器内部的离子注入的压敏电阻受压弯曲时阻值发生变化,并正比于所施加的触力,通过不锈钢插杆直接作用于传感器内部的硅敏感芯片;传感器内置惠斯顿电桥,如图2所示,通过桥路电阻阻值正比与触力大小,从而检测桥路各电阻的变化后就产生对应的mV输出信号;从而其能够提供精确、可靠的触力传感功能,有效的避免了机械手抓取时对秧苗的损害。
电机采用一体化闭环交流伺服驱动电机。由于电机带动传送带以及育秧盘转动并且需要与机械手进行配合,所以对于电机的动态响应有很高的要求。采用带编码器的电机,使其具有伺服电机的闭环特性,从而实现精确控制。单片机对其进行控制,适合应用于短距离快速启停的场合,使得系统具有极高动态响应,满足了和机械手进行配合的要求。
3 软件设计
3.1 PID算法
PID是比例(P)、积分(I)、微分(D)控制算法。比例,反应系统的基本(当前)偏差e(t),系数大,可以加快调节,减小误差,但过大的比例使系统稳定性下降,甚至造成系统不稳定。
积分,反应系统的累计偏差,使系统消除稳态误差,提高无差度,因为有误差,积分调节就进行,直至无误差;微分,反映系统偏差信号的变化率e(t)-e(t-1),具有预见性,能预见偏差变化的趋势,产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的动态性能[2]。PID控制原理图如图3所示。
该系统采用比例微分控制规律(PD)控制,微分具有超前作用,对于具有容量滞后的控制通道,引入微分参与控制,在微分项设置得当的情况下,对于提高系统的动态性能指标,有着显著效果。因此,对于控制通道的时间常数或容量滞后较大的场合,为了提高系统的稳定性,减小动态偏差等可选用比例微分控制规律。
式中KP为比例放大系数;TD为微分时间。
通过传感器采样机械手的位置,与预定的位置比较得出偏差e(t),通过比例和微分调节PWM,使得机械手达到预期角度。通过多次实验,可以得出适合的KP和TD值,机械手准确地拾取到秧苗并放入喂入器。
4 结语
旱田移栽机机械手自动喂苗系统是一种运动平稳、结构简单、制造成本低廉全自动旱田移栽机。它的技术指标能够达到目前国内先进水平,并且在保证技术指标及选种质量的前提下,传送带不仅能够将秧苗往下传送,而且能够将其往左或往右传送,提高了该系统拔苗和喂苗的准确度,保证了秧苗成活率。此外,该系统体积小,成本低,有利于产品使用以及推广。旱田移栽机机械手自动喂苗系统实现了旱田移栽机的自动化,提高了耕种的效率,大大的缓解了农村劳动力短缺的问题。
参考文献
[1]任保宏,徐克军.MSP430单片机原理与应用[M].北京:电子工业出版社,2004.
[2]欧艳华.基于PID的现代加工生产机械臂控制系统设计[J].轻工科技,2015.
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
现代畜牧科技(2021年10期)2021-11-19 08:42:22
现代畜牧科技(2021年5期)2021-07-20 08:07:24
快乐语文(2021年15期)2021-06-15 10:19:38
童话世界(2020年13期)2020-06-15 11:54:32
河北果树(2020年1期)2020-02-09 12:31:42
故事大王(2019年4期)2019-05-14 16:38:48
城市轨道交通(2019年2期)2019-04-04 08:55:54
兽医导刊(2016年6期)2016-05-17 03:50:30
通信电源技术(2016年1期)2016-04-16 04:57:29
