蜗杆传动机构运动方向判别的教学探讨*
2015-05-27 09:07余江鸿
中国教育技术装备 2015年20期
◆余江鸿
作者:余江鸿,湖南工业大学(412007)。
蜗杆传动机构是一种常用的机械传动方式,其结构原理是机械原理和机械设计基础课程所涉及的一个知识点。蜗杆传动机构亦称为蜗轮蜗杆机构或蜗轮机构,其实质上是交错轴斜齿轮机构的正交传动,交错角通常采用90°,由蜗杆、蜗轮和机架组成。蜗杆可认为是一个齿数少、直径小、轴向长度较大、螺旋角β1很大的斜齿轮;而蜗轮齿数较多、直径大、螺旋角β2很小,可视为一个宽度不大的斜齿轮。蜗杆传动机构具有承载能力大、传动平稳、振动冲击小等特点。在机械原理和机械设计基础课程教学过程中,蜗杆传动机构的旋向及运动方向判别是一个重要的教学内容,教材上提供的判别方法基本都是传统的左右手法则。本文将在该方法基础上,总结教学过程中的经验,介绍速度矢量图法和三角形法,以加深学生对蜗杆传动机构的理解,同时可作为教学参考。
1 左右手法则
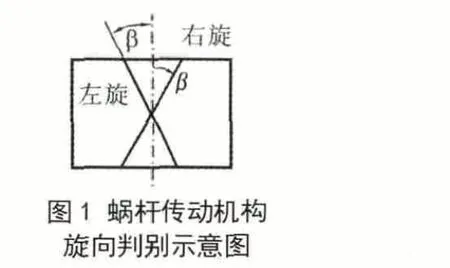
根据左右手法则判别蜗杆传动机构运动方向时,须先判定蜗杆和蜗轮的旋向。可用如下方法判别旋向:如图1所示,沿蜗杆或蜗轮轴线来观察轮齿线,若轮齿线右方高,则为右旋;反之为左旋。可通俗表达为:使蜗杆或蜗轮轴线沿铅垂方向(蜗杆立放,蜗轮平放),观察齿形,左边高则为左旋,右边高则为右旋。同时交错角为90°时,根据蜗杆蜗轮正确啮合条件,蜗杆和蜗轮旋向应一致。
在确定了旋向后,蜗杆和蜗轮转向的判别方法为:左旋蜗杆用左手,右旋蜗杆用右手,四指沿蜗杆转向,大拇指反方向为啮合点处蜗轮转向。如图2所示,P 点为蜗杆和蜗轮瞬时啮合点,蜗杆螺旋线旋向为右旋,用右手四指沿蜗杆运动方向握拳,大拇指所指反方向为P 点运动方向,即P 点方向朝左,据此可判断蜗轮运动方向为顺时针。

2 速度矢量图法
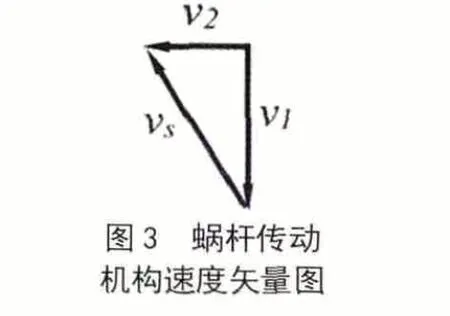
同样如图2所示,以蜗轮2 上的P 点为动点,以蜗杆1为动系,由相对运动原理可知:
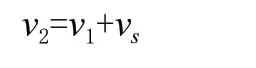
式中,v2为蜗轮上圆周速度,v1为蜗杆圆周速度,vs为相对滑动速度,其方向沿蜗杆螺旋线方向。根据速度合成原理,可作速度矢量图如图3所示,可判断蜗轮上P 的速度方向,因此蜗轮转向为顺时针。
3 三角形法
对于左右手法则,机械类或非机械类学生都可以正确使用。对于速度矢量图法,对非机类学生使用起来则较困难。结合教学实践,可将速度矢量图法进一步简化为三角形法。
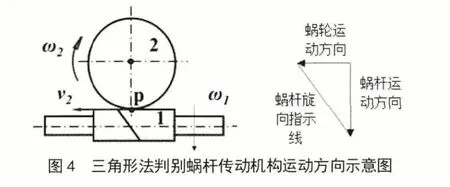
具体判别方法为:画一直角三角形,斜边代表蜗杆旋向指示线,两条直角边代表蜗杆和蜗轮的运动方向;如图4所示,P 点为蜗杆和蜗轮啮合点,三角形斜边为向左倾斜的一条线段(蜗杆实际旋向是右旋),一条直角边代表蜗杆运动方向垂直向下,则另一条直角边代表蜗轮上P 点运动方向水平向左,据此判断蜗轮转向为顺时针。三角形中,两直角边的指向原则为:箭头相对或箭头相背。
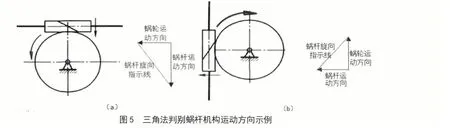
运用三角形法过程中,需注意斜边代表蜗杆旋向的指示线而不是蜗杆的实际旋向,实际判别时可直接在蜗杆上绘图,也可根据蜗轮运动方向判定蜗杆运动方向。如图5(a)和图5(b)所示蜗杆传动机构判别,结合蜗杆蜗轮的具体位置,可判别(a)图中蜗轮转向为逆时针,(b)图中蜗轮转向为顺时针。
4 结语
蜗杆传动机构运动方向的判别方法中,左右手法则是传统方法,适合所有专业学生使用;速度矢量图法适合于机械类学生使用;在速度矢量图法基础上提炼出来的三角形法无前期知识要求,适合于所有专业学生,且方便快捷。教学过程中使用多种方法,可加深学生对蜗杆机构传动机构的理解。
猜你喜欢
长江大学学报(自科版)(2022年1期)2022-02-25
内燃机与配件(2021年18期)2021-09-24
机械设计与制造工程(2021年3期)2021-04-16
中国特种设备安全(2019年8期)2019-10-14
科技风(2018年33期)2018-05-14
神州·中旬刊(2017年7期)2017-09-10
教育教学论坛(2017年34期)2017-08-30
邵阳学院学报(自然科学版)(2015年2期)2015-06-05
山西建筑(2015年10期)2015-06-05
机械工程师(2015年10期)2015-02-02