
基于下垂控制的微电网并网仿真分析*
2015-05-25 00:33陈其工高文根
重庆工商大学学报(自然科学版) 2015年3期
吴 飞,陈其工,高文根
(安徽工程大学安徽省检测技术与节能装置重点实验室,安徽芜湖 241000)
基于下垂控制的微电网并网仿真分析*
吴 飞,陈其工,高文根
(安徽工程大学安徽省检测技术与节能装置重点实验室,安徽芜湖 241000)
以下垂控制的微电网为研究对象,在Matlab/Simulink平台上搭建了微电网仿真模型,分析了逆变器控制参数、负荷的变化对并网暂态过程的影响,提出了“负荷功率基准点”的概念,并在大量仿真数据的基础上,确定了微电网孤岛正常运行和最佳并网的负荷功率范围,从而为微电网平滑并网提供重要参考。
下垂控制;负荷功率基准点;并网;负荷功率范围
微电网是一个由分布式电源、能量变换装置、储能系统、负荷和监控系统、保护装置汇集而成的小型发配电系统。它具有高灵活性、高可靠性等优点,能够实现自控制、保护和管理,同时可以有效地协调分布式电源与大电网之间的矛盾,因而成为未来电网发展的重要分支。此外微电网既可以孤岛运行,也可并网运行,还可在两种运行方式之间进行平滑切换[1,2]。
分布式电源的类型不同,在微电网中所起作用也可能不同,其逆变器也需要采取不同控制策略,常见的分布式电源的逆变器控制方法可分为:恒功率控制、恒压控制、下垂控制[3]。由于下垂控制对通信系统的依赖小、可靠性高,且易于实现DG和负荷的即插即用以及微电网运行模式的无缝切换,得到了国内外的广泛关注[4-6]。
1 下垂控制原理
微电网中的分布式电源采用下垂控制策略时,其输出可以按照预先给定的P-f和Q-U特性进行自动调节。下垂控制策略的主要优点是易于实现分布式电源的即插即用;同时,在微电网进行运行模式切换时,可以保持控制策略不变,从而避免了控制策略的切换而影响微电网的暂态稳定性。当微电网从并网模式切换为孤岛模式时,只需断开微电网并网开关,此时采取下垂控制策略的分布式电源可以自动分担微电网系统有功功率和无功功率的不平衡,实现微电网孤岛模式下的稳定运行;当微电网从孤岛模式切换为并网模式时,同时可以直接闭合电力电子开关,分布式电源将根据系统的运行频率和接入点的电压调整输出功率实现稳定运行[3]。现将主要就下垂控制的原理及其控制器设计做一些讨论。
下垂控制是描述模拟发电机组功频静特性的一种控制方法,其控制原理如图1所示。
微电网系统中分布式电源初始运行点为a,输出功率为P0,无功功率为Q0,系统频率为f0,系统电压为U0。当系统有功负荷突然增大时,有功功率不足,导致频率下降;系统无功负荷突然增大,无功功率不足,将导致电压幅值下降。反之亦然。逆变器下垂控制系统的调节原理为:当系统频率减小时,控制系统调节分布式电源输出的有功功率按下垂特性相应地增大,与此同时,负荷功率也因频率下降而有所减小,最终在下垂控制系统和负荷本身调节效应的共同作用下达到新的平衡,即到达新的平衡点b运行。由图1可以得到P-f及Q-U的下垂关系式:

或者

基于上面的分析可以看出下垂控制存在两种控制方法:(1)通过调节输出功率来控制电压频率和幅值,即P-f和Q-U的下垂控制;(2)通过调节频率和幅值来控制功率的输出,即f-P和U-Q的下垂控制。采用第一种控制方法来设计下垂控制器。

图1 下垂控制原理
2 微电网结构模型与参数设置
在Matlab/Simulink平台上建立了如图2所示的微电网结构模型,微电源经三相电压型逆变器逆变为三相交流电,然后经过滤波器滤波,最后经过线路、负荷、开关连接到大电网,微电源在孤岛和并网模式下都采用下垂控制。
仿真初始参数设置如下,DG参数:Pn=75 kW,Qn=0 var,En=311 V,fn=50 Hz,Vdc=800 V;滤波器参数:Rf=0.02 Ω,Lf=500 H,Cf=1 400 μF;负荷参数:P1=75 kW,Q1=0 var。仿真时间为1 s,0.5 s时微电网从孤岛状态切换至并网状态。其中Pn为微电源运行在额定频率下的输出功率,Qn为微电源运行在额定电压下的输出功率,En为额定电压,fn为额定频率,Vdc为直流电压。
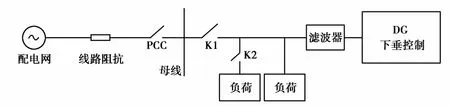
图2 微电网结构模型
3 仿真分析
对微电网中某些参数对其并网暂态过程的影响进行仿真分析与总结,根据图2的所示的微电网结构模型,通过仿真来分析逆变器的控制参数、负荷等因素对微电网并网暂态过程的影响。需要说明的是,经过仿真发现,参数的变化对电压的并网暂态影响很小,限于篇幅,所以只讨论参数变化对频率的并网暂态过程的影响。
3.1 逆变器控制参数对暂态过程的影响
主要对微电源控制器中的参数的变化对并网暂态过程的影响进行仿真分析,仿真结果如下:
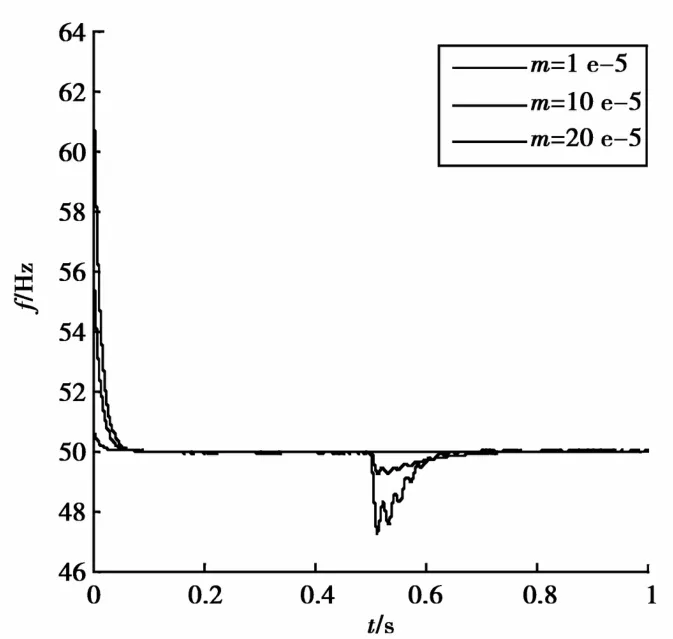
图3 m对暂态的影响

图4 n对暂态的影响

图5 kvp对暂态的影响
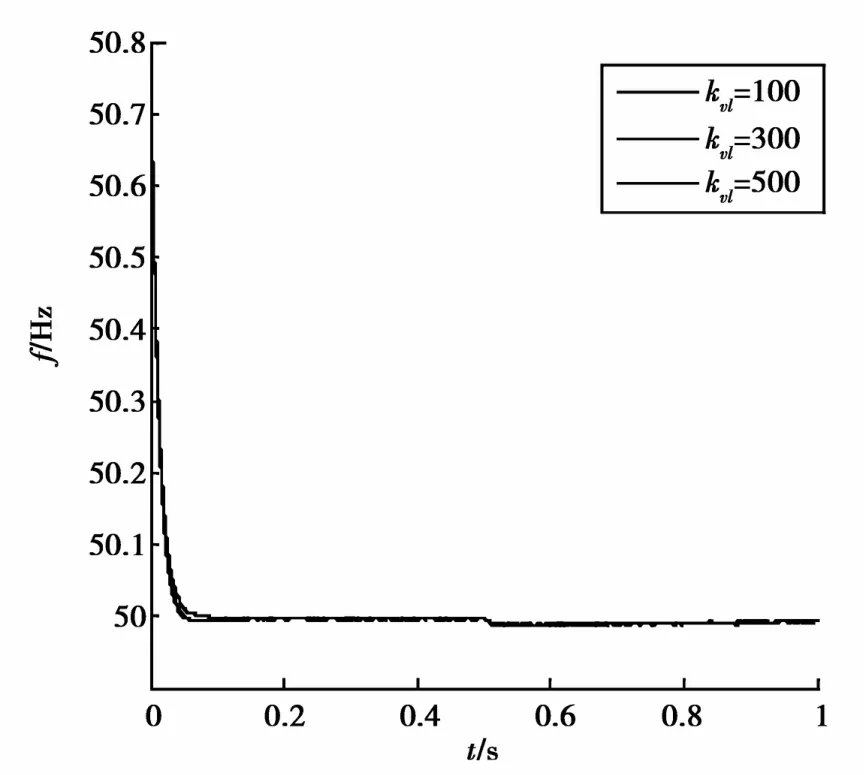
图6 kvI对暂态的影响
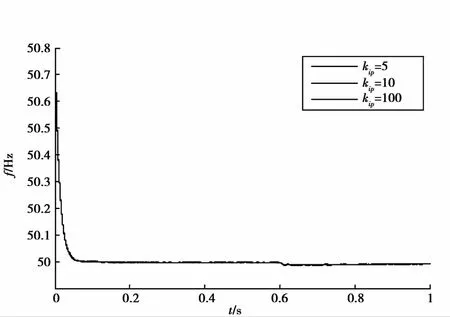
图7 kip对暂态的影响
m为P-f下垂系数,从图3可以看出,在其他参数保持不变的情况下,m=1e-5时,f在并网的暂态过程中能平滑过渡,随着m的增大,在t=0.5 s(也即并网瞬间)f的振荡幅度越大,经过大约0.1 s后开始趋于稳定。
n为Q-U下垂系数,从图4可以看出,在其他参数不变的情况下,随着n的增大,在并网暂态及并网后,f都出现了微小的波动,在电能质量要求相对不高的情况下,可以允许发生。
kvp为电压内环控制的比例系数,从图5可以看出,在其他参数不变的情况下,增大kvp,在没有并网前f就出现了微小震荡,随着kvp逐渐增大,f的震荡越剧烈,系统失稳。
kvI为电压内环控制的积分系数,kip为电流内环控制的比例系数,从图6、7可以看出,在保持其他参数不变的情况下,增大kvI、kip,对f影响很小,可以忽略。
3.2 负荷的变化对暂态过程的影响
负荷采用恒功率负荷,下面将主要讨论P和Q的变化对并网暂态过程的影响。
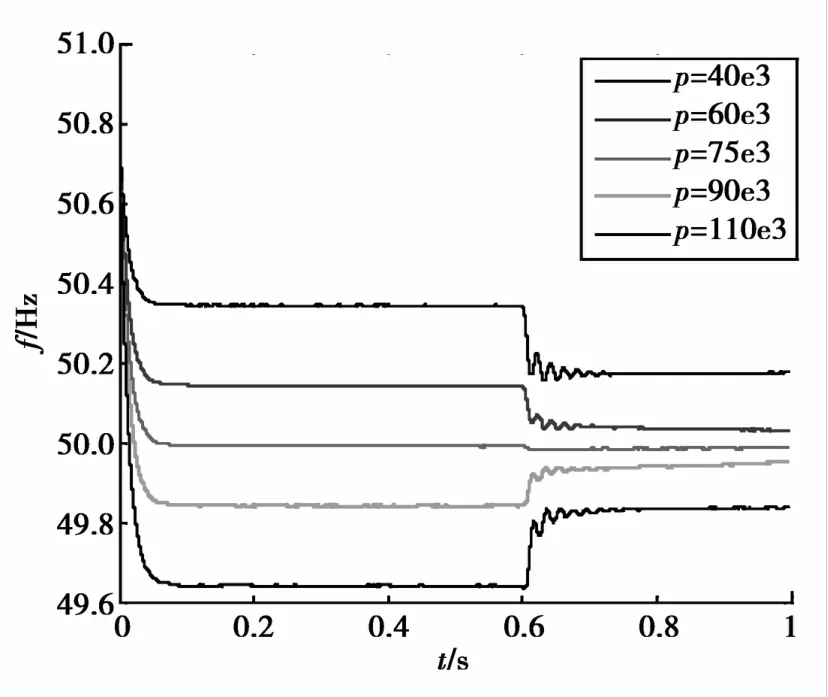
图8 P对暂态过程的影响
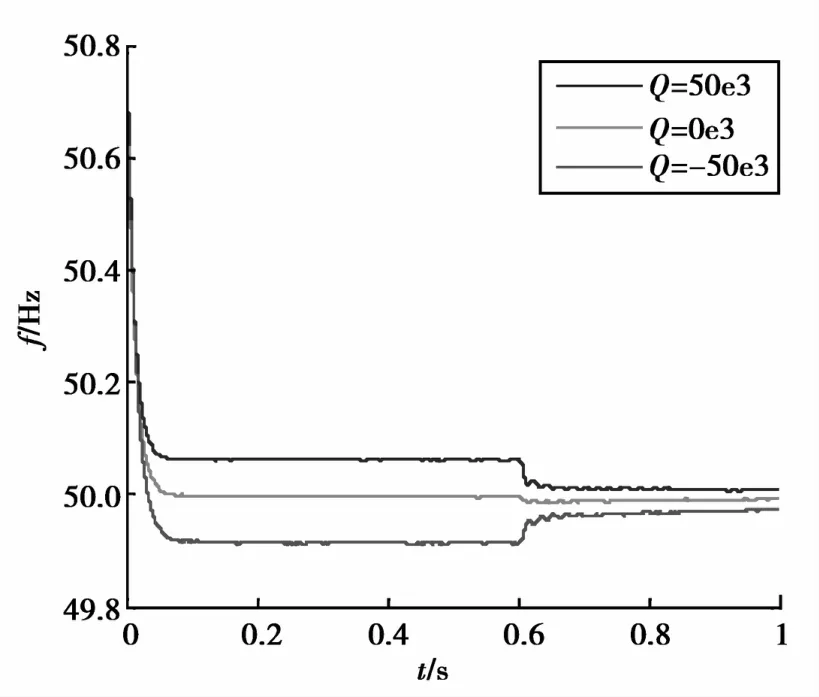
图9 Q对暂态过程的影响
(1)负荷有功功率P的变化对并网暂态过程的影响。保持Q=0 var,改变P,得到仿真结果图8,从图8中可以看出,当P=75 kW时,并网前的f为50 Hz,对并网暂态过程影响很小,也即在并网过程中实现了平滑过渡,此时负荷功率P正好等于微电源额定输出功率Pn,所以规定负荷功率P=75 kW“负荷有功功率基准点”;当P在75 kW基础上逐渐增大,相应地并网前的f小于额定频率50 Hz,P增加越大,f减小越多,同样P以75 kW为基准减小,f的变化也有类似的情况;此外,并网前的f与50 Hz相差越大,并网的瞬间f震荡越剧烈,达到稳定的时间也变长。
(2)负荷无功功率Q的变化对并网暂态过程的影响。保持P=75 kW,改变Q,仿真结果见图9,从图9中可以看出,当Q=0 var时,并网前的f为50 Hz,对并网瞬态有微小的影响,从而实现了平滑并网,此时Q正好等于微电源额定输出功率Qn,称负荷功率Q=0 var“负荷无功功率基准点”;当Q在0 var的基础上增大,f会增大,当Q在0 var基础上减小,f会相应减小,其在并网瞬间的震荡程度与并网前f偏离额定频率有关,f偏离越大,震荡越剧烈;另外,对比图8和图9,偏离基准点相同数值的P和Q,P使f偏离50 Hz的程度远大于Q,经过大量仿真数据可以大致得出,10 kW(相对于基准点增加或减少)使频率减小或增大0.1 Hz,而需要容性60 kvar(相对于基准点)才能使频率减小0.1 Hz,需要感性无功80 kvar(相对于基准点)才能使频率增加0.1 Hz。因此在负荷无功相对于基准点不大的情况下,可以忽略无功功率对负荷的影响。此次P-f和Q-U未实现完全解耦控制,是因为微电源的逆变器的端阻抗并非纯感性[9]。
以上主要对微网中逆变器控制参数、负荷的变化对切换过程中频率的波动影响进行分析总结,可为微网系统的平滑并网提供重要的参考价值。
4 微网运行的功率范围
在孤岛情况下,下垂控制的主要目的是维持系统的电压、频率在规定范围内,并根据负荷的需求调整功率输出。当微电源发出的功率能满足负荷需求时,电压频率稳定在额定运行点;当负荷功率超出微电源所能发出最大功率时,孤岛时的电压频率就要上升(或下降),此时又分为两种情形,一种电压频率虽然上升(或下降)但是在规定标准范围内,系统可以继续运行,另一种情形就是功率差额过大导致电压或频率下降幅度超出允许范围,必须采取切负荷的措施来维持微电网的运行。在实际生产中,为了保证对重要负荷的持续供电,通常在第一种情形下,也可考虑切掉部分次要负荷,来保证微电源有足够的备用容量[8,9]。
在并网的过程中,最佳并网条件是大电网电压相角超前于微电网,幅值低于微电网,频率高于微电网[10],因此在并网前,使微电网系统的电压、频率、相角满足一定的范围即可实现平滑并网。
由此得到下垂控制的4个功率范围(图10)。A区域:孤岛时系统电压频率稳定在额定值,取额定电压值为U=311 V,f=50 Hz,其边界为有功功率、无功功率的最大值;B区域:满足并网最佳标准,设定311 V≤U≤326.5 V,49.8 Hz≤U≤50 Hz;C区域:孤岛系统电压频率偏离额定值,但是在规定允许范围内(满足电能质量要求),即280 V≤U≤326.5 V,49.5 Hz≤U≤50.5 Hz;进入到区域D后,系统电压频率不能满足规定标准,可以通过切负荷或增加负荷来实现孤岛稳定运行,需要注意的是在切换的过程中可能由于交换功率过大,会导致系统直接失稳。

图10 下垂控制的功率范围
基于一些参数进行了大量仿真,得到了微电源负荷功率的大致边界(表1)。
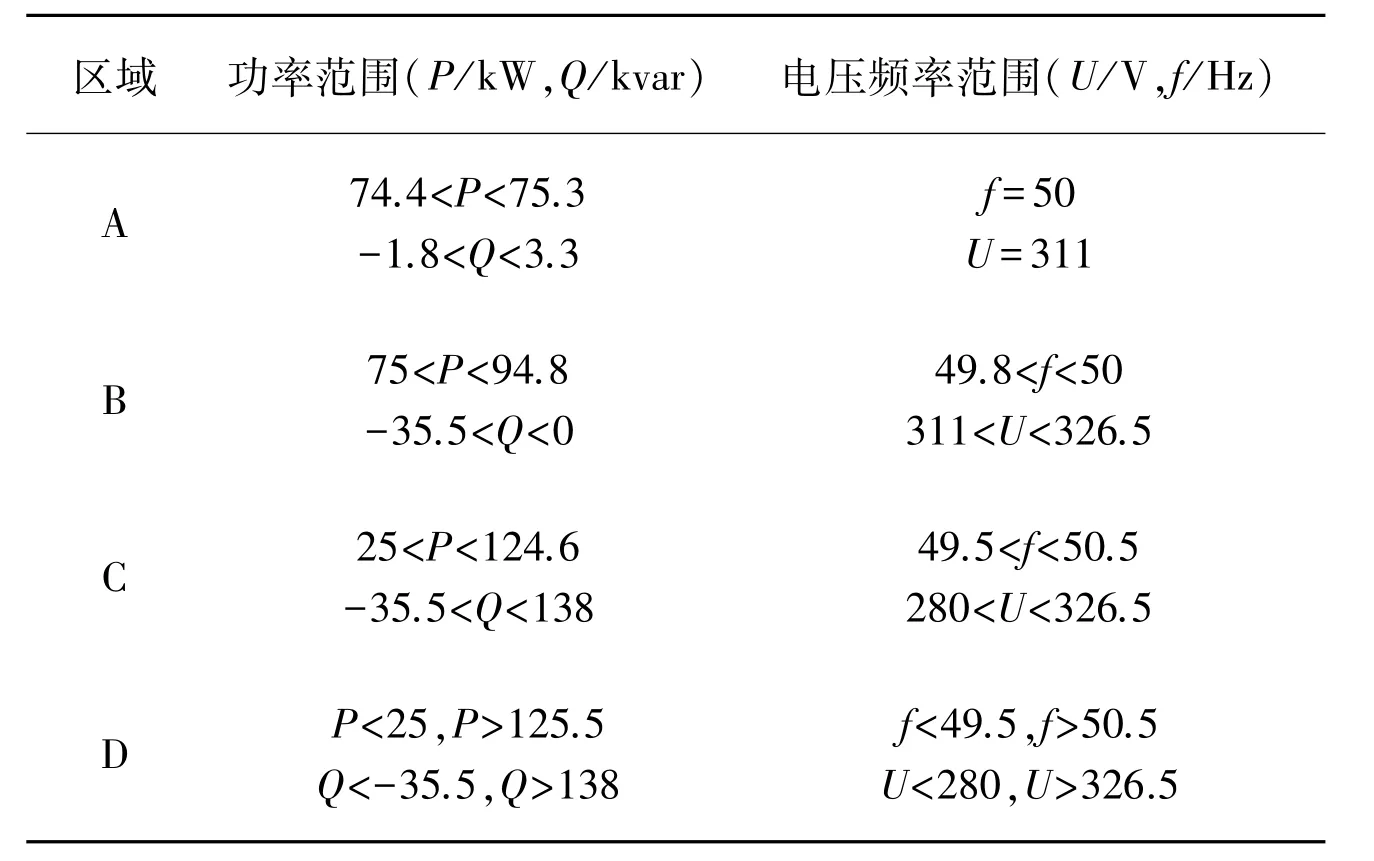
表1 下垂控制负荷功率范围
基于下垂控制的微电网由于具有负荷的即插即用,因此在微电源额定功率不变的情况下,通过改变负荷来使电压频率达到并网的最佳范围,从而实现平滑并网。
5 结 语
主要对微网中逆变器控制参数、负荷的变化对切换过程中电压和频率的波动影响进行仿真分析并总结,可为微网系统的平滑并网提供重要的参考价值。另外,基于大量仿真数据,确定了微电网孤岛正常运行的功率范围和并网的最佳功率范围,为微电网稳定运行和顺利并网提供重要依据。
[1]鲁宗相,王彩霞,闵勇,等.微电网研究综述[J].电力系统自动化,2007,31(19):100-107
[2]盛鹍,孔力,齐智,等.新型电网-微电网研究综述[J].继电器,2007,35(12):75-81
[3]王成山.微电网分析与仿真理论[M].北京:科学出版社,2013
[4]GUERRERO J M,VASQUEZ J C,MATAS J,et al.Control Strategy for Flexible Microgrid Based on Parallel Line-interactive UPS Systems[J].IEEE Trans Ind Electron,2009,56(3):726-736
[5]郑竞宏,王燕廷,李兴旺,等.微电网平滑切换控制方法及策略[J].电力系统自动化,2011,35(18):17-24
[6]KATIRAEI F,IRAVANI M.Power Management Strategies for Microgrid with Multiple Distributed Generation Units[J].IEEE Trans Power Syst,2006,21(4):1821-1831
[7]杨俊虎,韩肖清,姚岳,等.基于Matlab/Simulink的下垂控制微电网动态特性的仿真与分析[J].电力学报,2012,27(1):15-18
[8]王燕廷.微电网并网与孤岛运行模式切换的研究[D].哈尔滨:东北电力大学,2011
[9]李聪.基于下垂控制的微电网运行仿真及小信号稳定性分析[D].成都:西南交通大学,2010
[10]严贵干,孟方旭,王岩,等.微电网并网理论的前提[J].中国科技论文,2012,7(8):652-656
Simulation and Analysis of Microgrid Interconnection Based on the Droop Control
WU Fei,CHEN Qi-gong,GAO Wen-gen
(Anhui Polytechnic University,Anhui Key Laboratory of Detection Technology and Energy Saving Devices,Anhui Wuhu 241000)
Focusing on the microgrid based on droop control,this paper designs a simulation model of mirogrid on Matlab/Simulink.The influence of inverter control parameters and load change on the interconnection transient process is analyzed,the concept of“load power benchmark”is proposed,the normal operation of the microgrid in island and the best interconnection load power range is determined on the basis of a large number of simulation data,which provides important reference from smooth interconnection of microgrid.
droop control;load power benchmark;microgrid interconnection;load power range
TM615
A
1672-058X(2015)03-0025-06
10.16055/j.issn.1672-058X.2015.0003.006
2014-07-18;
2014-09-22.
国家自然基金项目(61172131);安徽省科技攻关重大项目(1301022045).
吴飞(1989-),男,江苏泰州人,硕士研究生,从事微电网运行与控制研究.
猜你喜欢
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
新世纪智能(语文备考)(2020年9期)2020-12-31
学生天地(2020年34期)2020-06-09
阅读(快乐英语高年级)(2019年2期)2019-09-10
新高考(英语进阶)(2018年1期)2018-04-18
山东工业技术(2017年24期)2017-12-29
消费者报道(2016年3期)2016-02-28
风能(2016年12期)2016-02-25
中国卫生(2014年7期)2014-11-10
