垂直单轴跟踪光伏支架方阵间距计算界面设计
2015-05-15 13:30特变电工新疆新能源股份有限公司何银涛张梅黄华
太阳能 2015年7期
特变电工新疆新能源股份有限公司 ■ 何银涛 张梅 黄华
0 引言
垂直单轴跟踪支架用于固定低倍聚光组件,发电量较采用常规组件的固定支架系统有较大提高[1]。为避免遮挡,在垂直单轴跟踪支架方阵排布时,需要设置合理间距。根据GB 50797-2012《光伏发电站设计规范》要求[2],光伏方阵间距设置时需要保证在全年每天9:00~15:00(当地真太阳时)时段内相邻支架不互相遮挡。因此,在排布垂直单轴跟踪系统方阵时,科学合理地设置方阵间距,对于达到既能避免遮挡现象,又能充分利用土地资源的目的有重要意义。
1 建立垂直单轴跟踪支架数学模型
图1为垂直单轴跟踪支架结构简图。建立如图所示坐标系o-xyz,其中xoz平面与水平面平行,y轴垂直于xoz平面,x轴正方向指向正东方向,z轴正方向指向正南方向。A、B、C、D 4点为组串平面4个角点,四边形ABCD为矩形,组串平面与xoz平面夹角为α,在整个运动范围内α固定不变。L1为BC长度,L2为AB长度。
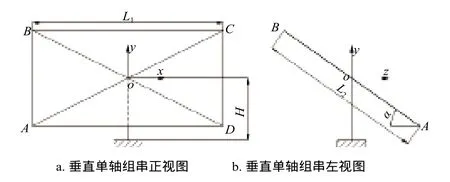
图1 垂直单轴跟踪支架结构简图
设组串平面ABCD初始位置在xoz平面内,AB边与z轴平行,BC边与x轴平行,则在坐标系o-xyz中,A、B、C、D 4点初始位置坐标表示为:

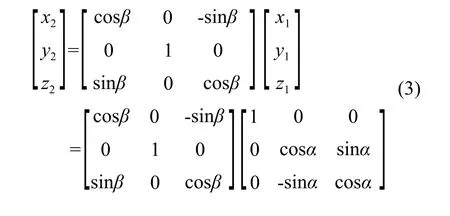
上述初始位置变换到图1所示位置(组串平面ABCD与xoz平面夹角为α,BC边平行于x轴),可通过组串平面ABCD绕x轴转动角度α获得。根据布尔莎-沃尔夫转换模型[3],坐标变换关系表示为:

垂直单轴跟踪支架绕y轴转动跟踪太阳方位角。设组串平面绕y轴转动角度为β,则根据布尔莎-沃尔夫转换模型[3]及式(2),坐标变换关系表示为:
2 太阳角计算公式[4]
2.1 真太阳时

式中,LAT为真太阳时;CT为地方标准时;LC为经度修正(每度4 min),如果地方子午圈在标准子午圈以东,则LC为正,反之LC为负。
以分为单位计算E,采用下面近似式:

式中,θ以弧度表示为2πdn/365,以角度表示为360dn/365;dn为天数排列的序号,1月1日为0。
2.2 太阳赤纬角

式中,n为从1月1日算起的天数。
2.3 太阳高度角

式中,φ为地理纬度;δ为太阳赤纬角;ω为太阳时角,正午时ω=0,每隔1 h增加15°,上午为正,下午为负。
2.4 太阳方位角

3 阴影数学模型
遮挡物高度与其阴影长度的几何关系如图2(以A点为例,点A'为A点在地面影子)所示,其中,h为太阳高度角,γ为太阳方位角。分别给出阴影长度、阴影长度南北向和东西向分量及相互之间的几何关系。
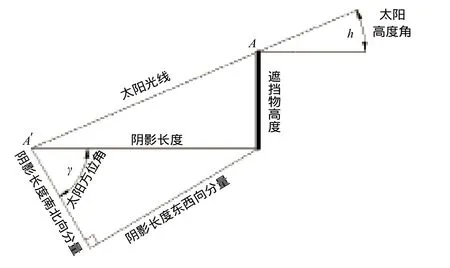
图2 遮挡物高度与其阴影长度的几何关系图
参照图1和图2几何关系,遮挡物高度表示为:HGi=yi+H,阴影长度Li=HGicoth,阴影长度南北向分量LNSi=|Licosγ|,阴影长度东西向分量LEWi=|Lisinγ|,其中i=A、B、C、D。则A、B、C、D 4点在地面的阴影A'、B'、C'、D'的坐标表达式为:

4 间距计算程序
根据以上理论分析,基于Matlab GUI进行编程,得到垂直单轴跟踪支架阵列间距计算的界面,辅助设计垂直单轴跟踪支架方阵的排布间距。
4.1 程序流程图
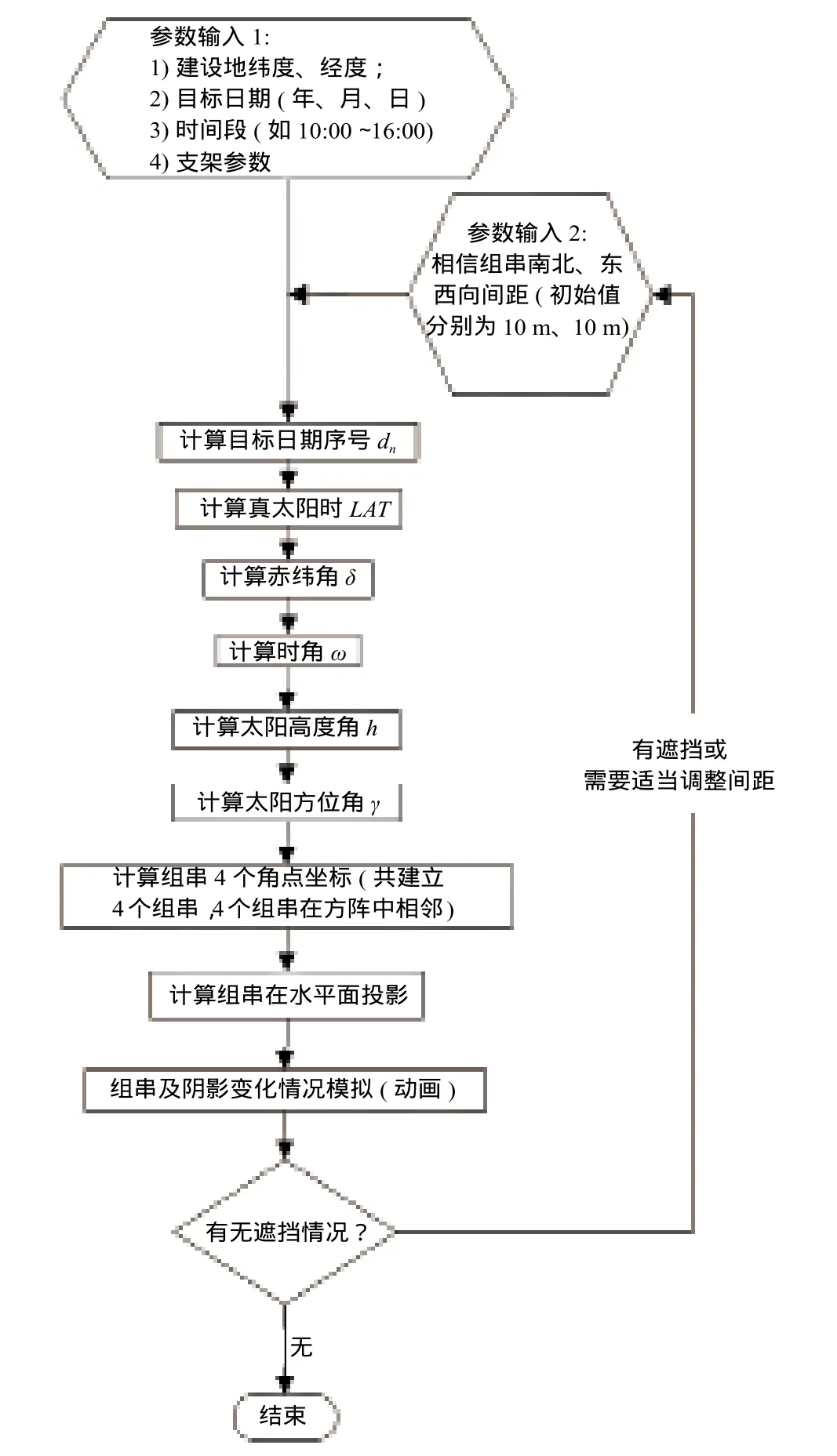
图3 程序流程图
4.2 垂直单轴跟踪支架间距计算界面
图4 垂直单轴跟踪支架间距计算界面
5 操作示例
5.1 已知条件
1)组串参数:α=35°,L1=6500 mm,L2=5500 mm,立柱高度H=2050 mm;
2)方位角跟踪范围为 -45°≤β≤45°;
3)建设地的地理条件:纬度42.6°,经度94.9°,假设地面平整。
5.2 操作步骤
1)首先根据已知条件在参数输入界面输入相应参数,包括:经纬度、时间段、方阵间距、垂直单轴支架参数。
2)点击“开始”按键,输入的时间段对应的真太阳时显示在左下角模块处,并从动画仿真区域可以观察在输入的时间段内组串平面(蓝色线框)及阴影(黑色线框)变化过程的仿真动画。
3)若在仿真过程中,阴影有重叠部分出现,则说明有遮挡情况(如图5所示,方阵间距为:南北向8 m,东西向8 m),返回第1)步,适当调节“方阵间距”参数(如图6所示,方阵间距修改为:南北向12 m,东西向9 m),再点击“开始”按键。
可以多次修改方阵间距参数,并进行动画仿真,观察仿真过程,直到设置的间距满足设计要求为止。如图6所示,相邻支架阴影无重叠现象。
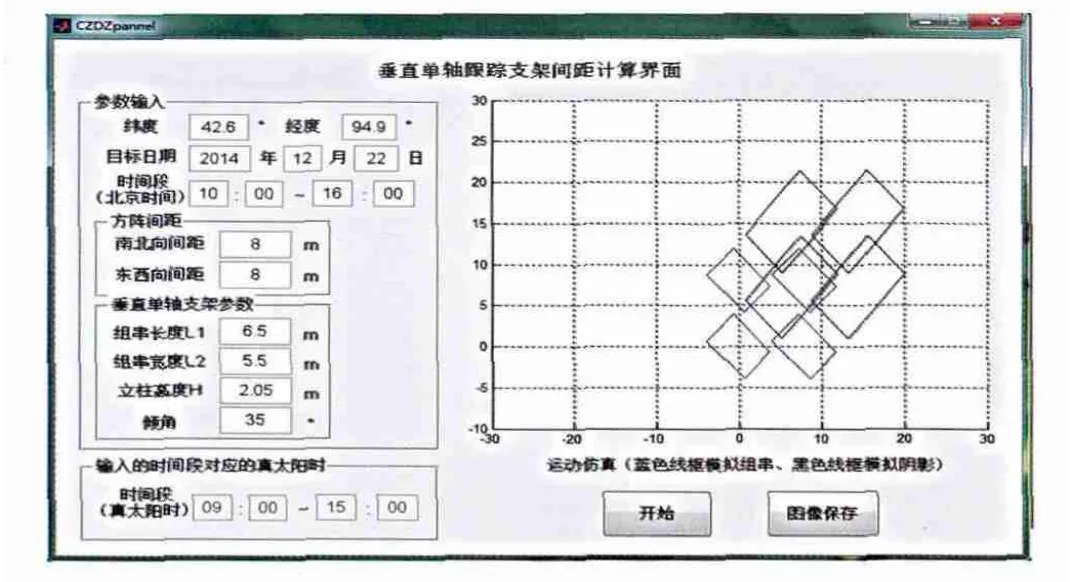
图5 间距计算示例1
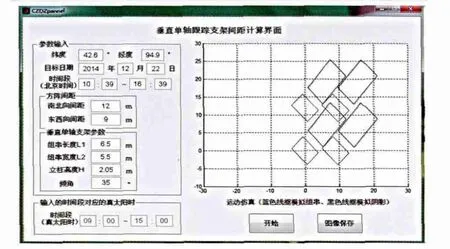
图6 间距计算示例2
6 结束语
垂直单轴跟踪支架间距计算界面,针对垂直单轴跟踪支架,可以对其在任意地理位置(通过经、纬度确定)、任意日期、任意时间段的阴影情况进行仿真,并对整个运动过程的阴影变化情况进行动画仿真,直观地观察阴影的整个变化情况,便于设计垂直单轴方阵排布间距,有效利用土地。
本界面的功能包括:1)真太阳时计算;2)垂直单轴方阵排布间距设计;3)阴影变化动画仿真。
[1]杜斌, 张耀明, 孙利国, 等. 低倍聚光光伏系统的实验研究[J]. 太阳能学报, 2008, 29(11): 1328-1332.
[2]GB 50797-2012, 光伏发电站设计规范[S].
[3]张宏. 布尔莎-沃尔夫转换模型的几何证明[J]. 测绘与空间地理信息, 2006, (2): 52-53.
[4]刘波, 等. 光伏发电系统设计及应用[M]. 北京: 中央广播电视大学出版社, 2011.
猜你喜欢
作文小学高年级(2022年6期)2022-07-01
矿产勘查(2020年2期)2020-12-28
潍坊学院学报(2020年6期)2020-11-22
文苑(2020年11期)2020-11-19
学生导报·东方少年(2019年24期)2019-12-30
中国诗歌(2019年6期)2019-11-15
中国测试(2018年10期)2018-11-17
散文诗世界(2016年5期)2016-06-18
数学大王·中高年级(2016年4期)2016-05-14
科技视界(2015年10期)2015-01-01