
基于模糊决策的大型客车电动助力转向系统研究
2015-05-15 01:53曹艳玲梁法明刘孟楠徐立友阎祥海
郑州大学学报(工学版) 2015年3期
曹艳玲,梁法明,刘孟楠,徐立友,阎祥海
(河南科技大学车辆与交通工程学院,河南洛阳471003)
基于模糊决策的大型客车电动助力转向系统研究
曹艳玲,梁法明,刘孟楠,徐立友,阎祥海
(河南科技大学车辆与交通工程学院,河南洛阳471003)
目前客车电动助力转向系统控制器多基于方向盘转矩和车速采用专家系统或查表法产生控制信号,自适应性能较差且不能有效反映轴荷对转向力的影响.基于模糊算法原理,设计了适用于客车等载运车辆工况的循环球式动力转向系统控制方法,通过建立EPS系统动力学模型,研究了伺服系统的控制原理;制定了助力电机电流的上下层控制策略,确定了以载重量和车速信号关联助力系数k的系统控制方案;基于MATLAB/Fuzzy logic工具箱建立了Mandani型模糊控制器,相关规则曲面完全覆盖原有系统控制特性区域,助力系数k对载重量变化的跟随性良好.基于ADAMS的助力系数仿真结果表明,在车速35 km/h整车载重量由空载到满载变化时,驾驶员转向力变化相比原控制系统减少65%,最大转向力下降5 N,伺服转矩有效反映载重情况,转向操纵性能良好.
电动助力;控制模式;模糊控制;隶属度;控制规则
0 引言
EPS(Electric Power Steering,简称EPS)采用电力取代液力伺服系统,取消了结构复杂的液压装置,解决了传统液压助力转向系统常见的液压油泄露问题,提高了转向系统响应的准确性,较大程度地改善了操作过程,顺应了“绿色化”的技术发展趋势[1-3].目前,EPS系统得到了广泛应用,伺服系统控制器多采用专家系统或查表法产生控制信号,自适应性能较差;相关控制过程多基于车速和方向盘转矩信号进行,用于客车、载运车辆等重载车辆时控制效果有待提高[4-7].因此,基于载重量和车速研究具有自适应性的EPS系统控制方案具有重要的价值.
国外针对客车的研究开展较早,目前技术转化阶段已经完成,相关产业化进程发展良好[8-9].国内相关研究开展较晚,但近年来相关技术研究取得了长足发展.北京理工大学的林逸等[10]基于奥运会期间用车技术要求,针对电动客车开发了轴荷高达6 180 kg的EPS系统.长安大学的陈丁跃等[11]针对客车EPS系统研究了电动机控制策略和匹配关键技术.但是,基于载重量研究EPS系统自适应控制方法依然存在较大的技术空白,实现相关技术的自主化具有重要研究价值.模糊控制系统具有良好的快速性、鲁棒性和自适应性,在现代工业产品中得到广泛应用[12-14].基于此,本研究以宇通城市客车ZK6126CHEVG4为研究对象,提出一种载重量关联助力系数决策的方法.
1 电动助力转向系统
1.1 工作原理
控制单元根据车速传感器信号,转矩传感器信号和载重信号,决策出助力电流的大小,同时根据转向盘的转角判断出驾驶者的转向方向.电机的控制有电压控制和电流控制两种方式,助力电流与助力力矩成正比关系,因此控制器可以通过控制电流的大小直接控制助力的大小.EPS结构如图1所示,该系统由信号传感装置(主要有扭矩传感器和车速传感器)、控制单元(ECU)及转向执行机构(助力电机、减速机构)等组成.
1.2 数学建模
由牛顿第二定律,可得转向盘—转向轴模型的微分方程:

图1 电动助力转向系统结构示意图Fig.1 Structure of electric power steering system

式中:Th为驾驶员作用在转向盘上的转矩,N·m; Ks为扭矩传感器的刚度系数,N·m/rad;θc为转向盘的转角,rad;θ1为转向螺杆的转动角度,rad;Jc为转向盘及转向管柱的等效转动惯量,kg·m2; Bc为转向管柱的茹性阻尼系数,N·m·rad-1·s.
转矩传感器可以等效为扭杆弹簧,其运动的微分方程:

式中:Ts是转矩传感器的输出转矩,N·m.
电机的动力学数学模型:
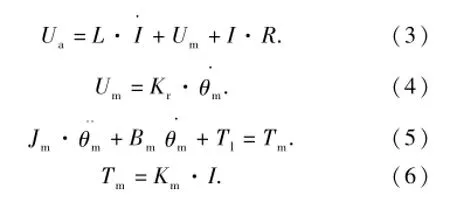
式中:Ua为电枢二端的电压,V;L为电枢的等效电感,H;I为电枢电流,A;Um为电枢反电动势,V;R为电枢电阻,Ω;Kr为电动机反电动势系数, V/(rad·s-1);θm为电枢转角,rad;Jm为电动机转子-蜗杆减速器的等效转动惯量,kg·m2;Bm为电动机输出轴的等效阻尼系数,N·m·rad-1· s;Tl为输出轴上的助力转矩,N·m;Tm为电机的电磁转矩,N·m;Km为电动机的转矩系数.
2 助力电机电流的上下层控制策略
EPS应能够在转向过程中提供合适的助力,减轻驾驶者的劳动强度,为驾驶员提供清晰的路感.本文研究的是客车电动助力转向系统,针对载重经常变化的运行工况,提出了一种助力电流决策的控制策略,降低载重变化对转向力的影响,即在载重增加时相应增加助力,以达到驾驶员转向手力基本不变的目的.
2.1 助力特性
常见的助力形式有3种,表征为3种形式的曲线:直线型、折线型和曲线型.笔者选择最简单的直线形式,加人载重后的数学表达式:
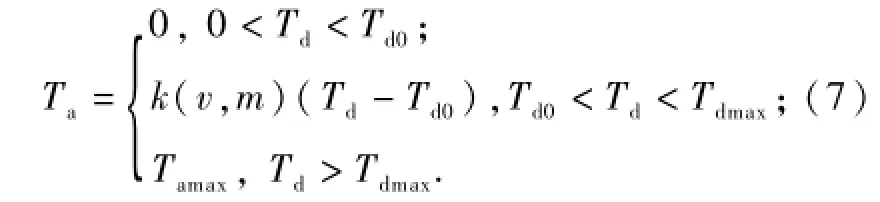
式中:Td为转向盘转矩传感器测得的转矩,N·m; Td0为电动机开始助力时的方向盘转矩,N·m;k为助力比例系数;v为车速,km/h;m为载重,kg;Tdmax为最大截止方向盘转矩,N·m;Tamax为电动机提供的最大助力力矩,N·m;Ta为助力力矩,N·m.
助力电流与助力比例系数亦成比例关系.为计算方便起见,笔者选择确定助力系数k.仿真计算时所用到的相关参数如表1所示.

表1 客车的相关参数表Tab.1 Relative parameters of bus
在ADAMS/car中,对整车进行阶跃转向仿真得到不同车速和载重条件下的最大转向力,通过计算得到所需助力比例值k如表2所示.
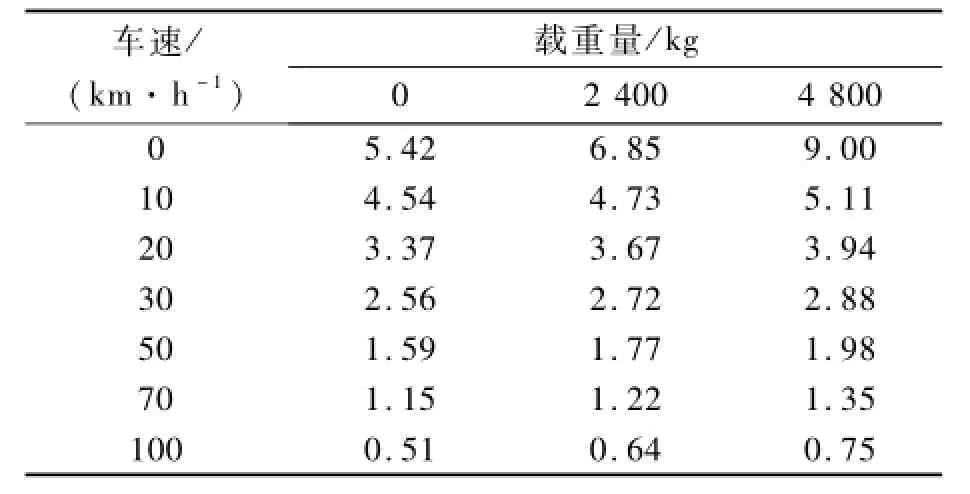
表2 不同车速和载重下的k值Tab.2 k values under different speed and load
2.2 模糊决策
基于MATLAB/Fuzzy Logic工具箱,以车速信号v和载重信号m为输人变量,以助力比例系数k为输出变量设计模糊控制器.
确定输人输出的论域,定义基于各个变量的语言变量.车速信号v的基本论域为[0,100],量化因子为1;将其划分为7组模糊值,记为v0、v1、v2、v3、v4、v5、v6;并分为7组等级v={0,10,20,30, 50,70,100}.载重信号m的基本论域为[0, 4 800],量化因子为1;将其划分为3组模糊值,记为m0、m1、m2,并分为3组等级m={0,2 400, 4 800}.对车速、载重建立三角型隶属度函数,如图2和图3所示.
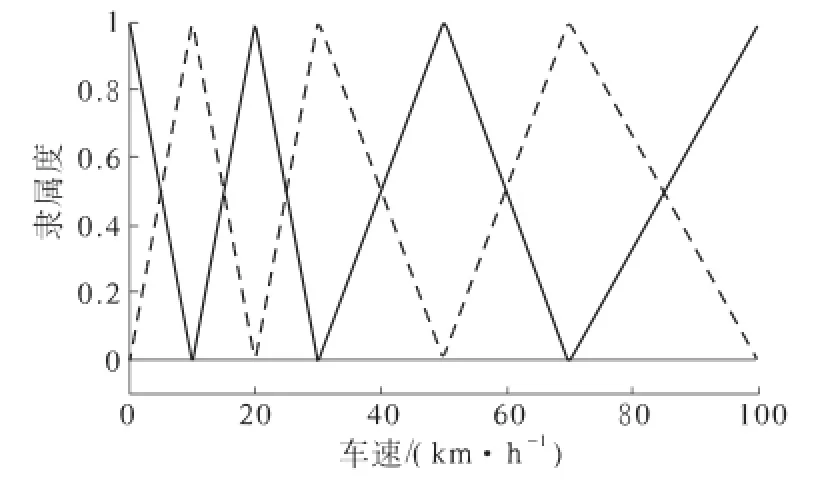
图2 车速v的隶属度Fig.2 The membership of the speedv
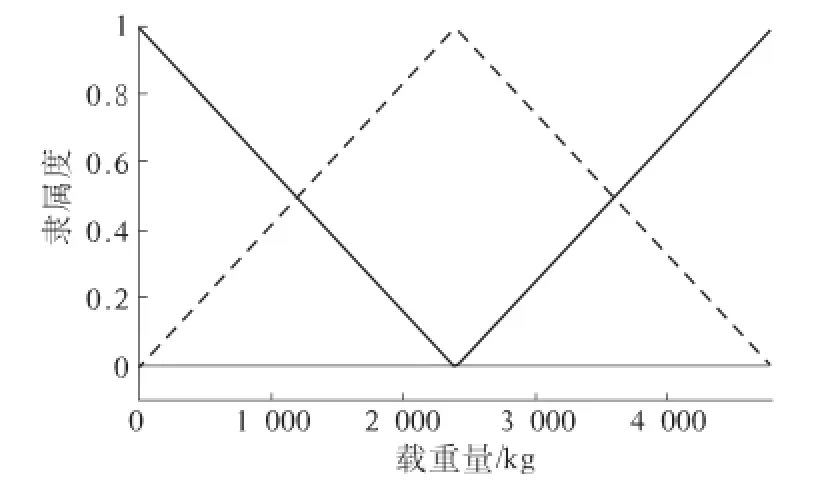
图3 载重m的隶属度Fig.3 The membership of the mass m
输出变量k的基本论域为[0,9],将其划分为k1,k2,…,k17等17组模糊值.基于表2的数据建立21条if v and m,then k的控制规则表如表3所示.
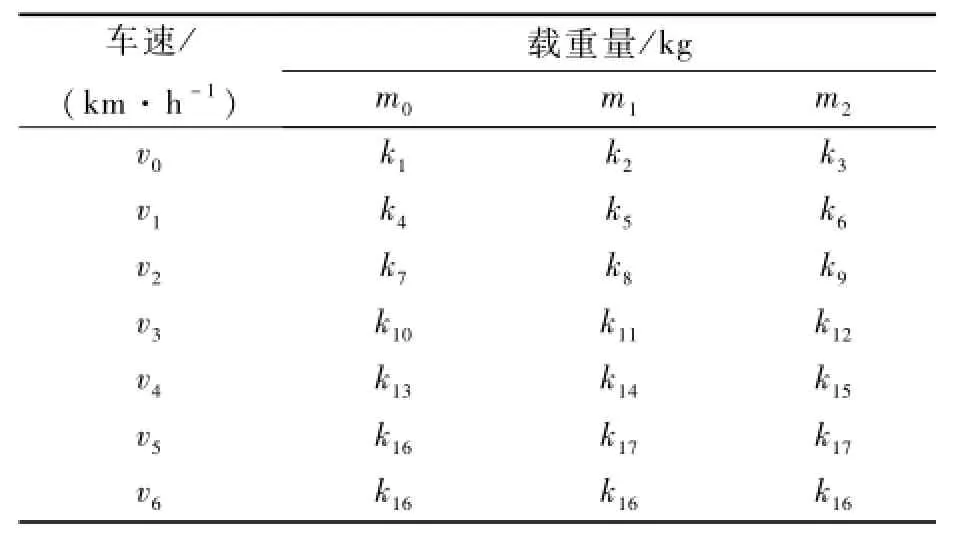
表3 助力系数的模糊控制规则Tab.3 Fuzzy control rules of power coefficient
2.3 下层目标电流跟踪
根据转向的要求,采用H桥式斩波电路实现电动机正反转运行工况,电动机电流的调节可通过脉冲宽度调制(PWM)实现.采用PID方法实现对EPS电机电流的闭环控制,改善转向系统的动态特性和稳态精度,提高控制系统的鲁棒性.
3 仿真分析
对模糊控制器进行仿真,控制器输出规则曲面如图4所示,载重对k值的影响如图5所示.
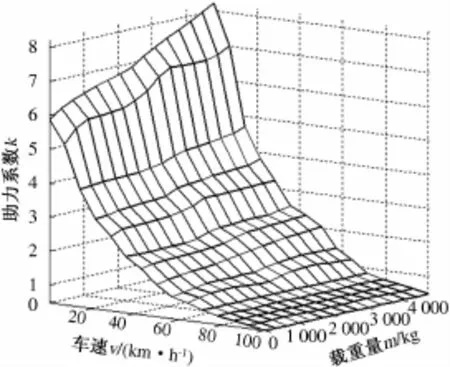
图4 控制器输出规则曲面Fig.4 Controller output rule surface
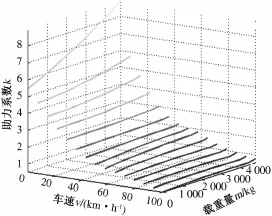
图5 载重对k值的影响Fig.5 The influence of load on the k value
由图4可知,k的曲面图反映出模糊控制器输出值与试验数据表2一致,且完全覆盖表2所示控制规则特性区域.由图5知,同一车速下随着载重的增加,助力系数k值略微上升;低速重载工况下,助力系数k的增加率明显高于高速轻载工况,相关模糊规则设定符合客车等载运车辆工况特点.
为验证设计的助力可以有效降低载重对转向力的影响,基于ADAMS平台,通过VARVAL模块输人助力信号.在车速为35 km/h;载重m0= 0 kg;m1=2 400 kg;m2=4 800 kg的条件下进行正弦输人仿真,得到未考虑载重和考虑载重时转向力随时间的关系,如图6、图7所示.
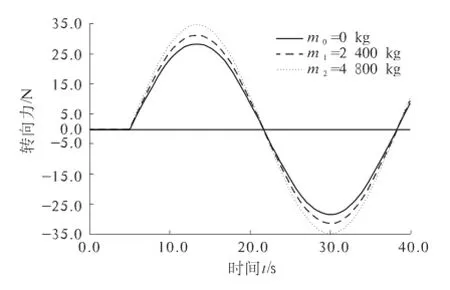
图6 未考虑载重时转向力的变化Fig.6 The change of steering force when not considering load

图7 考虑载重时转向力的变化Fig.7 The change of steering force when considering load
由图6可知,载重由空载到满载变化时,最大转向手力增加了8 N.由图7可知,载重由空载到满载变化时,最大转向手力仅增加了3 N.
4 结论
(1)基于客车工况特点设计相应EPS系统模糊控制规则,建立相关模糊控制器仿真模型.结果表明,控制特性曲面完全覆盖原有查表法控制特性区域,自适应性能较好.
(2)通过增加载重量与助力系数之间的关联关系,建立相关控制方法.控制规则表明,助力系数对于载荷量变化的跟随性较好,且符合载运车辆的工况特点.
(3)基于ADAMS的仿真结果表明,相较原来EPS控制系统,本研究控制方案控制效果较好,载荷变化范围内驾驶员转向力变化量下降65%;伺服系统作用充分发挥,有效降低了运载车辆因载荷改变对转向性能的影响.
[1] 雷琼红.汽车电动助力转向(EPS)技术的现状和发展趋势分析[J].机械工程师,2009(9):53-55.
[2] 王其东,杨孝剑,陈无畏,等.电动助力转向系统的建模及控制[J].农业机械学报,2004,35(5):1 -4.
[3] 王启瑞,黄森仁,陈无畏.基于模糊自调整PD控制的EPS助力特性[J].农业机械学报,2004,35 (4):1-3.
[4] 刘喜东.大客车EPS助动力矩及控制策略研究[D].西安:长安大学汽车学院,2009.
[5] 向铁明,易际明,方道.电动助力转向系统特性曲线的设计[J].西华大学学报,2009,28(3):35 -39.
[6] 陈国荣.商用车辆EPS系统总体设计及控制策略研究[D].西安:长安大学汽车学院,2008.
[7] 宁超成.大型电动客车助力转向系统的控制策略研究[D].武汉:武汉理工大学汽车工程学院,2012.
[8] 张国良,曾静,柯熙政,等.模糊控制及其Matlab应用[M].西安:西安交通大学出版社,2002.
[9] 陈丽.基于ADAMS的汽车电动助力转向系统的仿真分析[D].武汉:华中科技大学机械科学与工程学院,2005.
[10]林逸,申荣卫,施国标.纯电动客车电动助力转向控制器开发[J].江苏大学学报:自然科学版, 2006,27(4):310-314.
[11]陈丁跃,陈李吴.新能源节能动力汽车及电工电子设计研发[J].中国科技论坛,2007,12(11):32 -36.
[12]申荣卫,林逸,台晓红,等.电动助力转向系统建模与补偿控制策略[J].农业机械学报,2007,38 (7):5-9.
[13]陈无畏,时培成,高立新,等.ADAMS和Matlab的EPS整车系统的联合仿真[J].农业机械学报, 2007,38(2):22-26.
[14]张洛明,杨茁,何春霞.组合挂车转向拉杆连接孔位的研究[J].郑州大学学报:工学版,2014,35 (5):68-70.
Research of Large Bus Electric Power Steering System Based on Fuzzy Control
CAO Yan-ling,LIANG Fa-ming,LIU Meng-nan,XU Li-you,YAN Xiang-hai
(College of Vehicle and Traffic Engineering,Henan University of Science and Technology,Luoyang 471003,China)
In view of the bus electric power steering(EPS)controller based on the steering torque and speed expert system or look-up table is used to produce control signal,which can not effectively reflect the current situation of the axle load and its adaptive performance is poor.Based on fuzzy algorithm princip le,this study designed a controlmethod of circulating ball type EPSwhich is suitable for bus.Through the establishment of the EPS system dynamicsmodels,this paper shows the control principle of the servo system;through the upper and lower control strategy research of the assist motor current,system control scheme is determ ined in which coefficient k is decided by associating load and speed;based on MATLAB Fuzzy logic toolbox Fuzzy controller is established.The relevant rules completely cover the original control area and the coefficient k follows the change of load reflectwell.The simulation based on ADAMS shows thatwhen load changes from no load to full load at 35 km/h,the driver's steering force reduced by 65%and the largest steering force decreased by 5 N compared to the original control system.Servo torque effectively reflecting the load change and the steering performance tuns good.
electric power steering;controlmodel;fuzzy control;membership degree;control rule
U461.3
A
10.3969/j.issn.1671-6833.2015.03.014
1671-6833(2015)03-0064-04
2015-01-18;
2015-03-02
国家自然科学基金资助项目(60904023)
曹艳玲(1964-),女,河南洛阳人,河南科技大学副教授,主要从事电动助力转向理论及其应用的研究,E-mail:cylteacher@163.com.
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
防爆电机(2021年5期)2021-11-04
汽车观察(2019年2期)2019-03-15
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
电机与控制学报(2018年9期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04
北京汽车(2017年3期)2017-10-14
作文周刊·小学一年级版(2017年27期)2017-08-10
