
基于PMSM的DC20P2B1-A电梯伺服门机控制系统研制
2015-05-10 05:52邓之江王天雷
机电工程技术 2015年5期
邓之江,王天雷
(1.江门市蒙德电气股份有限公司,广东江门 529040;五邑大学信息工程学院,广东江门 529020)
0 引言
电梯的门机系统是电梯的一个非常重要的子系统,一个良好的电梯门控制系统对电梯系统的整体效果来说至关重要,其性能的优劣直接关系着整个电梯系统能否正常地运行。因此研制一种高性能,高可靠性,维护方便,成本适中的电梯门机控制系统具有重要的现实意义[1-2]。本文研制电梯DC20P2B1-A伺服门机控制器采用微控制单元MCU和智能功率模块IPM将电梯门机系统的电机驱动控制和电梯门逻辑控制集为一体,得到了一种可靠性高、控制灵活、成本低、体积小的电梯门机控制系统。
DC20P2B1-A伺服门机控制系统是以微控制器R5F71324AD80FPV作为程序控制核心部件,以IGCM06B60GA IPM模块作为逆变主电路器件,采用永磁同步电机矢量控制技术,设计出具有过压、欠压、掉电、过载、短路等保护功能的电梯门机控制器。该门机控制系统经实验验证和实际装机应用,均表明具有电压利用率高、噪声小、动作平顺和运行效率高等特点。
1 硬件设计
电梯的门系统一般使用电动机为动力,通过减速机构和开门机构带动轿厢门和厅门完成开关门的过程.为了使轿厢门开闭平稳迅速而又不产生撞击。电梯梯门系统运动控制的效果除与机械子系统有关之外,还取决于门机控制器子系统的控制与安全性能。一个驱动与逻辑控制一体化的电梯门机控制器由控制单元和驱动单元组成[3-4]。
1.1 控制单元设计
控制单元包含程序控制MCU、人机交互界面、数据存储单元、数字I/O与模拟I/O接口、串行通信接口。控制单元结构框图如图1所示。
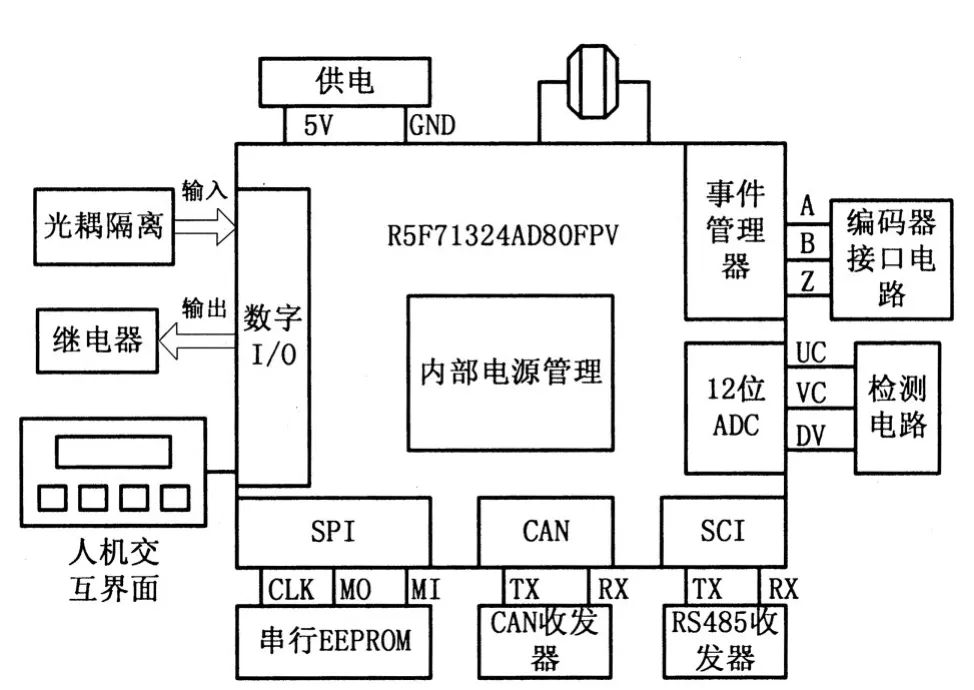
图1 R5F71324AD80FPV控制单元示意图
程序控制MCU采用R5F71324AD80FPV控制器。人机交互界面用4位LED数码管显示,实现系统运行参数与状态监测;采用增、减模式,确认4键实现参数设置与功能选择。参数存储单元使用带SPI接口的EEPROM AT93C86设计存储电路,保存开关门曲线参数、门宽参数、故障代码等系统运行参数。
检测电路配置了3路AD对电机的两相电流、驱动单元的直流母线电压进行检测。交变的电流信号具有一定的谐波分量,系统采用一阶RC低通滤波器,对驱动单元电流传感器输出信号进行滤波。
编码器接口电路将编码器输出的6路差分信号变成单端信号A、B、Z,再经低通滤波电路接入MCU的增量式光电编码器接口,以检测电梯门的运行速度和运行位置。
输入输出接口设计了4路带光耦隔离的输入端口,以接收电梯门反馈信号。另设置有3路继电器输出。
通信接口配置了两个通信接口:CAN、RS-485。CAN接口为电梯门机控制器与电梯中央控制系统的联网提供可能。通过RS-485接口,可以实现门机控制器与上位机通信。
1.2 驱动单元设计
驱动单元主要由功率电路、采样电路、保护电路等组成[5],如图2所示。①功率电路:本系统采用交-直-交变换技术实现电机的变频调速控制。逆变电路以英飞凌公司的IPM(智能功率模块)IGCM06B60GA为核心设计。该IPM内置了单相全波整流电路、欠电压保护以及短路保护。②采样电路:本驱动器采用Allegro公司的电流传感器ACS712对电机两相电流进行检测。该电流传感器为单电源供电,精度高、温漂小、线性度好、响应快。③保护电路:系统设计了过电流保护、过电压保护、掉电保护和短路保护等电路,以确保电梯门机系统安全工作。④系统电源:开关电源模块为系统提供+5 V、+12 V以及+24 V直流电源。MCU的5 V电源由变压器直接提供。
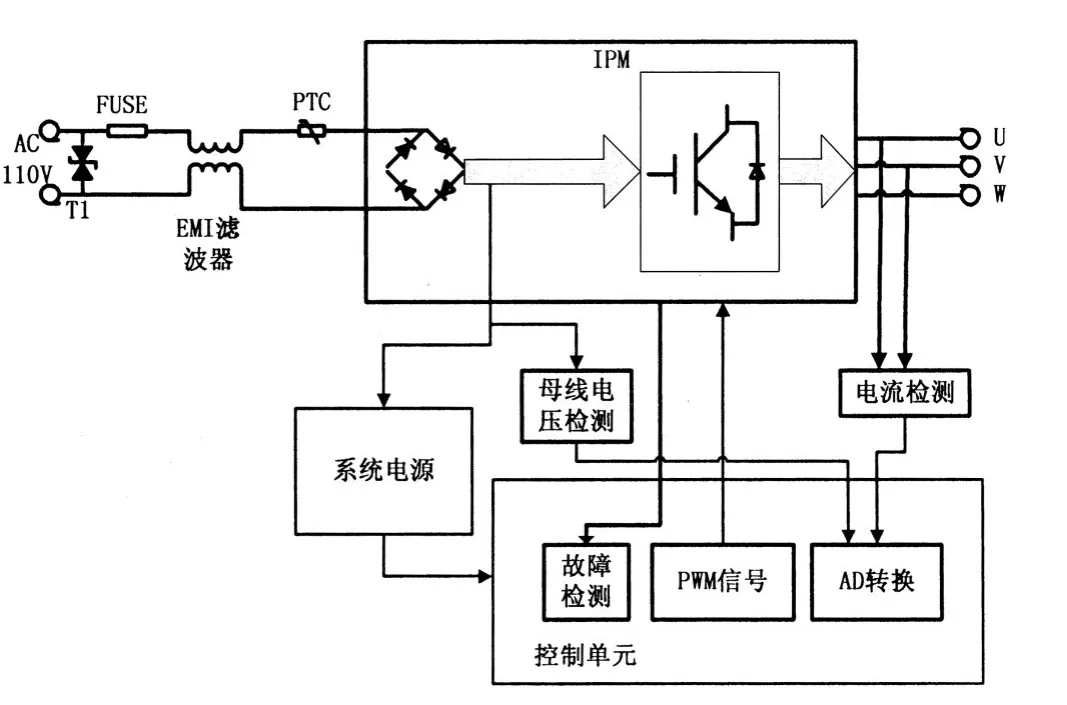
图2 驱动单元示意图
2 软件设计
2.1 电机控制技术
系统选用的永磁同步电机采用控制了矢量控制技术。图3为永磁同步电机矢量控制原理框图。永磁同步电机PMSM伺服系统主要包括位置环、速度环和电流环三个闭环。电流环和速度环作为系统的内环,位置环作为系统的外环。
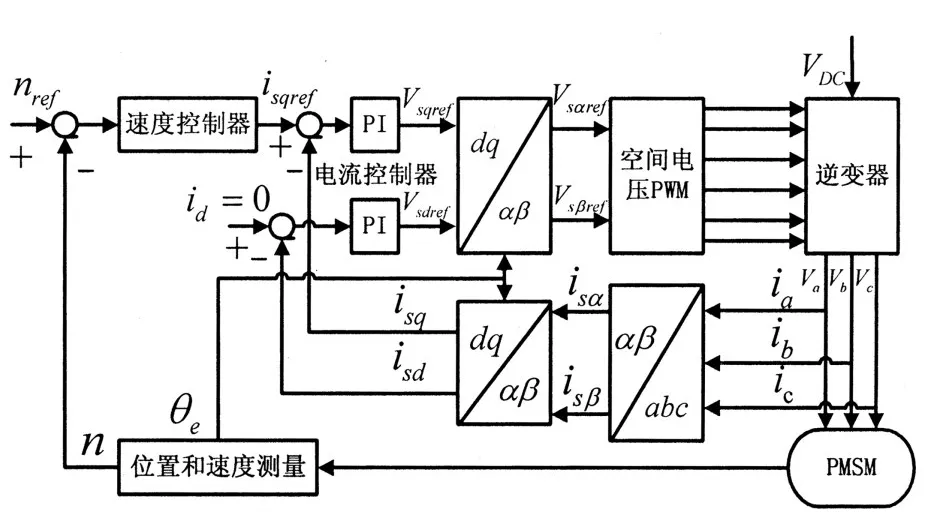
图3 永磁同步电机矢量控制原理框图
电流环是伺服控制系统中的重要环节,其输出直接影响着逆变器对电动机的驱动、系统的控制精度和响应速度,是决定系统性能的关键。永磁同步电机PMSM伺服系统要求电流环具有输出电流谐波分量小、响应速度快等性能,同时必须满足内环控制所需要的控制响应速度和随转速变化精确控制的交流电流大小及频率。位置环的作用是保证系统的静态精度和动态跟踪性能。本文速度环采用矢量控制算法,输出产生转矩的电流分量,作为电流环的给定值,可以增强伺服系统抗负载扰动能力,提高鲁棒性。
矢量控制主要的环节包括:转子位置和速度检测环节、定子三相定子电流检测环节、速度环控制器、电流环控制器、Clarke变换(三相静止坐标系转化为两相静止坐标系)、Park变换(两相静止坐标系转化为两相旋转坐标系)以及逆变换。矢量控制的过程为:①通过位置传感器准确地检测出电机转子(d轴)的空间位置,可计算出转子的电角速度n和速度;②通过比较电机的实际转速n和给定速度nref,使速度控制器输出对应的q轴定子电流的给定值isqref;③通过电流传感器检测出定子在三相定子坐标系的三相电流,并计算出对应的d-q电流分量isd和isq。由于采用的是id=0的控制方式,则两个电流控制器通过分别比较isd、isq和给定值0和isqref,计算出需要施加的空间电压矢量。4)将电流控制器输出的电压分量经过坐标变换,化为三相定子坐标系的值后,形成对PWM的控制信号,驱动逆变器对电机施加电压。
根据图3的永磁同步电机矢量控制框图可得SVPWM输出程序流程图,如图4所示。SVPWM子程序会对不同的运动标志值根据相应的运动曲线输出正确的SVPWM波形驱动电机,以实现不同的电梯门机运动。
2.2 伺服门机运行曲线[6]
电梯门机按机械结构分为同步门刀门机和异步门刀门机两种,本文主要讨论同步门刀门机。为了使轿厢门开闭平稳、迅速而又不产生撞击,门机动作必须满足:①平顺性要求,门机的运行曲线应满足最小加速度原则;②高效运行的要求,门机应在加速度最小的情况下尽可能达到最高的速度。有此可见,最优的运行曲线应当是带有变速拐角,没有高速稳速段,在不同的负载情况下实现与位置密切相关的速度曲线,这是关键控制技术之一。
DC20P2B1-A电梯门机控制系统的开门和关门的过程是一个变速运动过程为:开门时,初始阶段要求速度较慢以求开门平稳,然后加快速度以求开门迅速,在开门即将到位时,为避免产生撞击,又要求低速运行,直到轿厢门全部开启完毕,即开门过程速度曲线一般分为加速、匀速、减速、末段四个阶段组成。而关门时,初始阶段要求速度较快,然后减速运行,在关门即将到位时,要求低速运行,直到轿厢门全部合拢,即关门过程速度曲线分为加速、减速、末段三个阶段组成。常规运行曲线为:当电梯门运行没达到最大速度的时候,速度曲线没有匀速阶段。同步门电梯开门机的开门与关门速度曲线如图5所示,其中,ab是加速段,bc是匀速段,cd是减速段。当电梯门没有运行到最大速度的时候,开门和关门速度曲线是曲线1;当电机运行到最大速度时,开门和关门速度曲线是曲线2。此外,为实现上述运行要求,需要电机带有位置传感器,以达到优良的速度、力矩及位置控制性能。
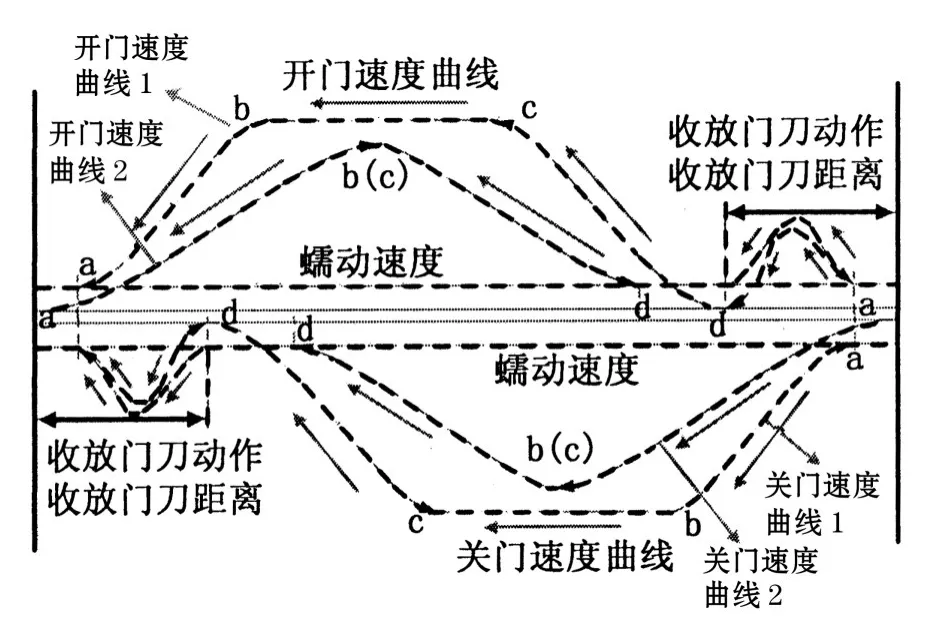
图5 同步门机系统速度曲线
2.3 门宽自适应过程
电梯门机控制系统需要具备自学习、自适应功能。在第一次装机调试时,自学习后的数据能够自动调整并记忆。DC20P2B1-A伺服门机控制系统能够在任何情况下进行正常学习轿门门宽(寻找零点),并且确保电流等性能参数满足使用要求,门宽自学习过程示意图如图6所示。
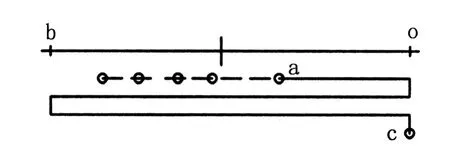
图6 门宽自学习过程示意图
以关门到位为原点o,b为开门到位位置。a为上电时电机停留的位置(可以在任意位置)。系统上电后不接受控制柜信号,以一定的速度执行自学习动作。电梯门机执行自学习的过程为:关门→关门到位→开门→开门到位→关门→关门到位。学习后得到总脉冲数。门机从a点到达c点的过程叫自学习。处于c点的门机开始接收控制柜信号。
2.4 安全保障程序
本系统通过对光电光幕信号、安全触板信号、门机运行速度、电机负载电流等信号进行检测,设计了一系列的安全保障程序,防止梯门夹人、梯门碰撞等事故发生。同时系统对电机电源缺相、编码器断线、系统掉电、系统短路、过电压和欠电压等故障也设计了相应的检测及处理程序。
2.5 上位机监控软件
为了便于调试参数、测试功能和故障诊断,为门机控制器开发了一个功能强大的上位机监控软件。图7为上位机软件主对话框。上位机监控软件可以实现以下功能:①实时显示电梯门运行的位置和电机工作状态;②可以显示和修改下位机控制器的各个参数;③实时数据采集功能,可以将电梯门机状态存储进本地数据库,并可再现门机工作状态;④可显示和记录故障;⑤可以编程运行测试指令。
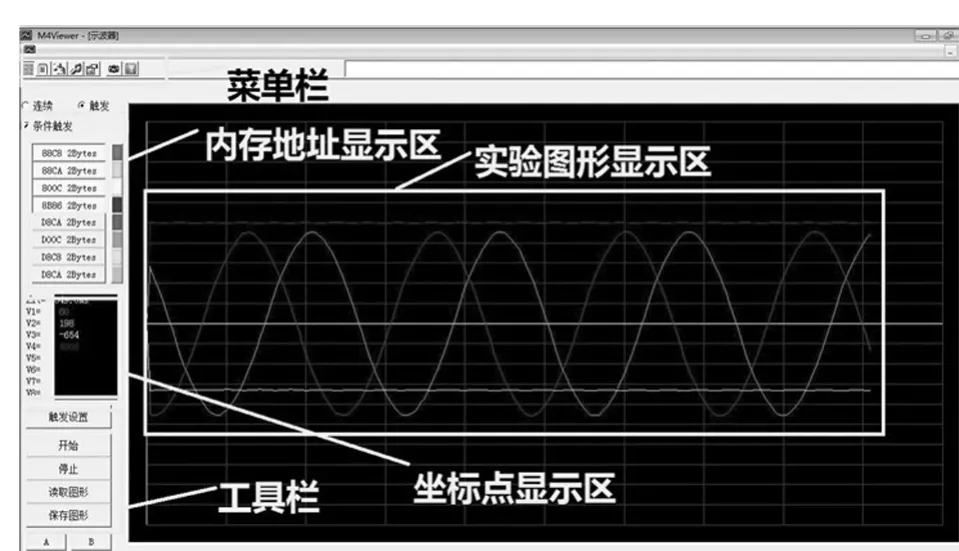
图7 上位机软件主对话框
3 实验分析
电机驱动实验选用了宁波华元机械科技有限公司生产的YCT133-16型三相永磁同步电动机。该型电机额定参数为:额定功率50 W,额定电压50 V,额定电流1.36 A,额定频率24 Hz,额定转速180 r/min。搭建实验平台如图8所示。
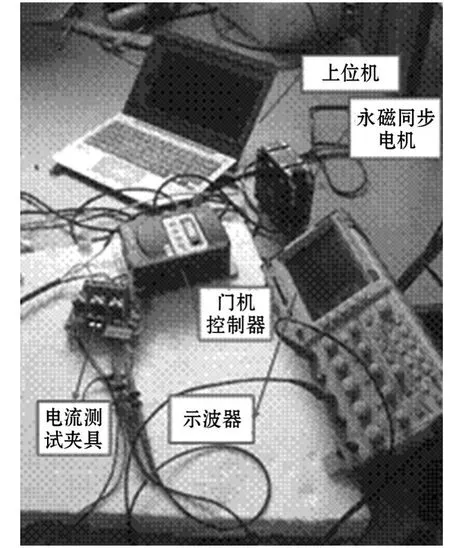
图8 实验平台示意图
系统采用永磁同步电机矢量控制技术,并应用精度高、运行速度快的DSP进行运动控制算法的计算。实验结果如图9所示。
上述实验图形为永磁同步电机在1 Hz、5 Hz、10 Hz以及20 Hz下定子两相电流的实时波形。实验表明,电机运行平稳、噪声小、效率高。
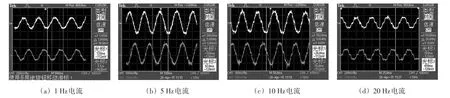
图9 电机定子两相电流
4 结语
电梯门控制系统是整个电梯系统中的重要组成部分。本文介绍了DC20P2B1-A伺服门机控制器以微控制器的组成R5F71324AD80FPV作为程序控制核心部件,以IGCM06B60GA IPM模块作为逆变主电路器件,采用永磁同步电机矢量控制技术,设计出具有过压、欠压、掉电、过载和短路等保护功能的电梯门机控制器。采用结构化设计实现了门宽自学习、电机控制和人机交换等软件控制功能。试验证明该系统具有良好的运行特性,电机运转平稳,噪音小,逻辑判断正确,错误及故障处理考虑周全。目前该系统已投入市场,配套的电梯运行平稳,安全可靠,得到用户的一致好评。
[1]张汉杰,王锡仲,朱学莉.现代电梯控制技术[M].哈尔滨:哈尔滨工业大学出版社,2001.
[2]刘连昆,樊运华,冯国庆.电梯实用技术手册[M].北京:中国纺织出版社,1999.
[3]刘天明,工炳健,郑佳,等.智能电梯控制系统[J].机电工程,2011,28(4): 461-462.
[4]徐晓宁,张新建.电梯门机控制器的研究[J].广州大学学报:自然科学版,2003,2(4):357-360.
[5]罗彬,曾岳南,陈佳桂.一种电梯门机控制器设计[J].微电机,2008(7): 89-92.
[6]刘文泽,冯顺萍,方昌始.门宽自学习及运行参数的修改在电梯门机系统的应用[J].电气传动,2002,32 (4):35-38.
猜你喜欢
中国特种设备安全(2021年1期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
中国特种设备安全(2019年3期)2019-04-22
中国特种设备安全(2019年1期)2019-03-13
中国特种设备安全(2018年11期)2019-01-08
小学生学习指导(低年级)(2018年3期)2018-01-31
小学生时代·综合版(2016年7期)2016-05-14
红蜻蜓·低年级(2015年11期)2016-02-02
小说月刊(2015年4期)2015-04-18
