一类混沌系统的状态量化反馈镇定控制器设计
2015-05-10 06:26翟因虎王银河范永青
广东工业大学学报 2015年3期
翟因虎,王银河,范永青
(广东工业大学1. 自动化学院;2. 信息工程学院, 广东 广州 510006;3.西安邮电大学 自动化学院, 陕西 西安 710121)
一类混沌系统的状态量化反馈镇定控制器设计
翟因虎1,2,王银河1,范永青3
(广东工业大学1. 自动化学院;2. 信息工程学院, 广东 广州 510006;3.西安邮电大学 自动化学院, 陕西 西安 710121)
用状态反馈法对含量化器的一类混沌系统的渐进镇定进行了研究.混沌系统的动力学状态方程的非线性项为任意整数阶的齐次函数.设计的更新律中量化器针对一类非线性项为高次齐次函数的混沌系统,数值仿真结果表明,若非线性控制器中存在量化环节时,原非线性控制器将无法镇定此类系统.为有效反馈镇定此类混沌系统,设计了一种新的含自适应量化器的非线性控制器.量化器中设置两个互为倒数的自适应放大器,使量化器具有自适应的量化范围和量化误差界,从而可自适应量化系统各种状态.同时应用Lyapunov原理和滑模变结构控制理论,推导得到量化器的放大系数和量化误差上界的更新律.一些典型混沌系统的数值仿真结果表明,所设计的非线性控制器可以有效自适应量化系统状态,并反馈镇定上述类型的混沌系统.
混沌系统; 状态反馈镇定; 自适应量化器; 状态量化
在工程实践与应用中,由于组件众多、结构复杂和元器件性能为非线性等原因,某些工程系统容易产生不规则和不可预测的混沌行为,这些混沌行为可能会危害系统正常运转[1].因此,几十年来,混沌系统的镇定吸引了科学与工程界的关注,其中通过状态反馈控制法镇定混沌系统是研究的一个重要方面[2-8]. 然而,这些研究成果中,需要混沌系统的连续时间状态测量值,即连续的测量状态值直接传递给反馈控制器.实际上,随着计算机控制技术的发展,用作控制器输入信号的系统状态通常需要用一些额外的信息处理设备如传感器、编码器和传输设备等进行检测和传输. 文献[9]提到,因为硬件设备总会导入某种形式的不精确性,系统状态不可能精确测定. 当利用数字装置时,产生测量误差的一个重要原因是由于只能获取状态的量化值,即控制器的输入信号实际上只能是状态的有限个量化数值[10]. 随着计算机数字控制技术的普及,由于数字控制过程 A/D和D/A转换器的作用,数字控制器和混沌系统必将交互作用互相影响. 由于数模转换器比特位数是有限的,混沌系统的真实状态变量的有限字长表达或量化效应显示为有效带宽通信信道,因而数字状态反馈控制器可能导致非预定的镇定控制结果. 例如,量化可导致极限环或者混沌行为,也可导致数字反馈系统的不稳定性[11-12].文献[12]研究了有DSP芯片系统的状态与输入信号量化的效应,结果表明,一些连续系统,若取比较高的采样频率,系统对量化系数不确定性较敏感,这更易导致系统不稳定. 混沌系统是一种特殊的非线性系统,对初始状态极端敏感. 因此混沌系统的状态量化更可能导致不稳定. 所以有必要对状态量化反馈控制的混沌系统的镇定方法加以研究.
过去几十年中,文献[13-15]应用静态量化方法镇定线性系统.文献[16-19]在设计非线性系统的反馈镇定控制器时,分析了时变量化方法,结果表明时变量化法比静态量化法能更好地镇定系统. 从数学模型的角度看,混沌系统的模型拥有特殊的结构,并对参数极其敏感,这暗示状态量化过程可能导致系统结构的变化并弱化反馈控制器的效率. 基于以上思路,文献[20]率先将一种时变自适应量化方法用于控制一类混沌系统,可镇定非线性项为二次齐次函数的混沌系统. 这是一种数学前提条件比较严格的方法,普适性比较差.本文将在其基础上进行拓展,提高量化状态反馈镇定法的适用范围,使之可以自适应镇定非线性项为高次齐次函数的一大类混沌系统.
1 带有高次齐次函数的混沌系统
考虑如下混沌动态系统

(1)
其中系统的状态矢量为x=(x1,x2,…,xn)T,x∈Rn,n为系统状态维数,A=(aij)n×n为实数矩阵,F(x)=(f1(x),f2(x),…,fn(x))T为系统非线性项,C=(c1,c2,…,cn)T∈Rn为常数项.
假定1 对于系统(1),假设
(2)
其中αi>0,‖*‖为欧氏范数,m为正整数.

2 自适应量化器和控制器设计
利用文献[16,18]的结果, 本文将量化器定义为q:Rl→L,z→q(z),其中L为空间Rl的一个有限子集,z∈Rl为被量化的变量,通过z的量化,Rl被分割为{z∈Rl:q(z)=i}(i∈L).量化器满足下面两个条件:
‖q(z)-z‖<ε,当‖z‖≤M时,
(3a)
‖q(z)‖>M-ε,当‖z‖>M时.
(3b)
其中M为量化范围界. 式(3a)给出了量化器不饱和时量化误差的界ε,而式(3b)给出了检测量化器饱和的条件. 一个典型的量化器公式为
(4)
其中函数[y]为四舍五入取整函数.
受文献[16,18-19]的启发,可以将一个时变参数β=β(t)引入到量化器(3)中,形成带有时变参数的量化器, 其量化的结果为
(5)
现在考虑满足假定1的混沌系统(1), 将控制器u引入到其中形成如下混沌控制系统:

(6)

XAT+AX+YT+Y<0,
(7)
其中X>0,且K=YX-1
但是, 如果系统状态被量化,则输入控制器的系统状态不再是x而是q(x),上述非线性控制器改变为
u=Kq(x)-F(q(x))-C.
(8)
本文的仿真结果表明此非线性控制器将导致混沌控制系统(6)失稳,结果如图1所示. 因此, 有必要考虑系统状态被量化的情形下控制器设计问题.
假定2 针对混沌系统(1),A+K为Hurwitz矩阵.
在系统状态被量化的情形下,本文提出带有形如(5)量化器的控制律:
(9a)
(9b)
其中,K由线性矩阵不等式(7)确定, 正定矩阵P通过解下列Lyapunov方程(10)获得.
(A+K)TP+P(A+K)=-Q.
(10)
其中Q为任意给定的正定矩阵.
在控制器(9)中, 量化器参数β(t)的更新律为

(11a)

(11b)


(12a)
(12b)
其中任意实数λ2>0.
定理1考虑混沌控制系统(6). 如果假定1和2成立, 那么控制器(9)、参数更新律(11)和自适应律(12)能够保证混沌控制系统(6)渐近稳定.

(13)


s(λmax(AT+A)‖x‖2+2‖F(x)‖‖x‖-

(14)
(15)
(16)


(17)

3 数值仿真
本文从文献[21-24]中选择4个典型的混沌系统进行数值仿真. 这4个系统的系统状态维数依次为3到6维,系统非线性项分别含2到5次齐次函数,混沌系统的具体参数如表1所示,其中K为混沌控制系统的增益矩阵,x0为混沌控制系统的初始状态,常数项C都为0.
首先用非线性控制器(8)对表1的4个典型混沌系统进行反馈镇定,其中系统状态是被静态均匀量化器(4)量化,数值仿真结果依次如下图1的(a)至(d)所示.
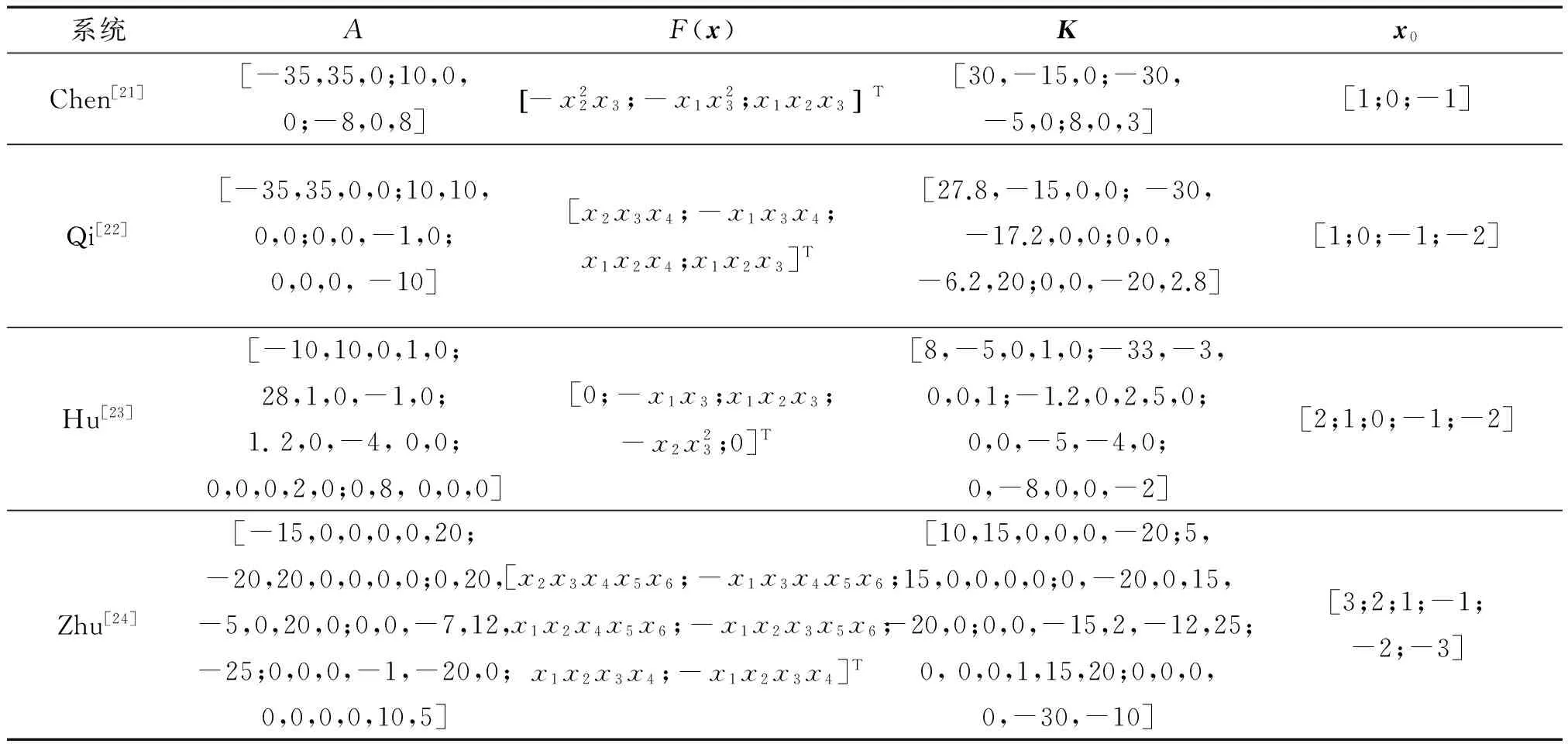
表1 4个用于数值仿真混沌系统的参数表
图1的仿真结果表明,非线性控制器(8)无法反馈镇定混沌控制系统(6).
是否可以使用文献[19]中的方法反馈镇定上述一类混沌系统?文献[19]的核心思想是找出混沌系统所有非线性项的Hessian矩阵的最大特征值,用于更新非线性控制器(9)中量化器的时变参数. 为此,必须假定所有Hessian矩阵为常数矩阵,从而混沌系统的非线性项必须为2次以下齐次函数,即文献[19]适用范围仅为非线性项为2次以下齐次函数. 而文献[21-24]中混沌系统的非线性项都含有3次以上的高次齐次函数,所得Hessian矩阵必然为时变矩阵,无法确定最大的特征值,从而无法使用文献[19]方法进行数值仿真. 因此, 必须重新设计非线性控制器.

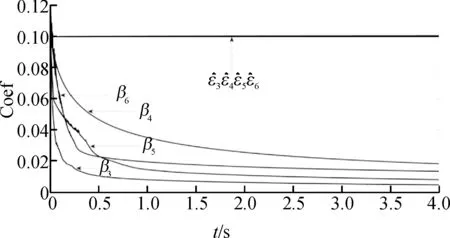
图2的数值仿真结果表明,对于非线性项含3次以上高次齐次函数的混沌系统,可用本文方法设计的非线性控制器自适应量化状态反馈镇定.
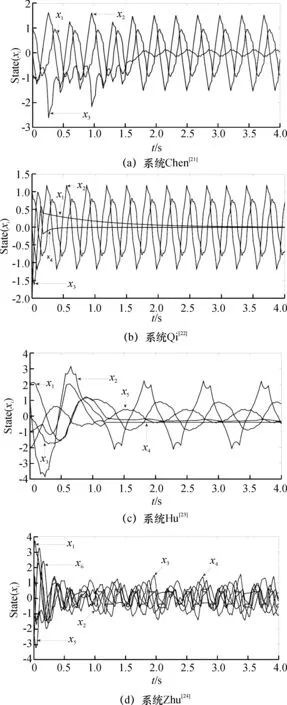
图1 非线性控制器(8)反馈镇定各混沌系统的数值仿真图
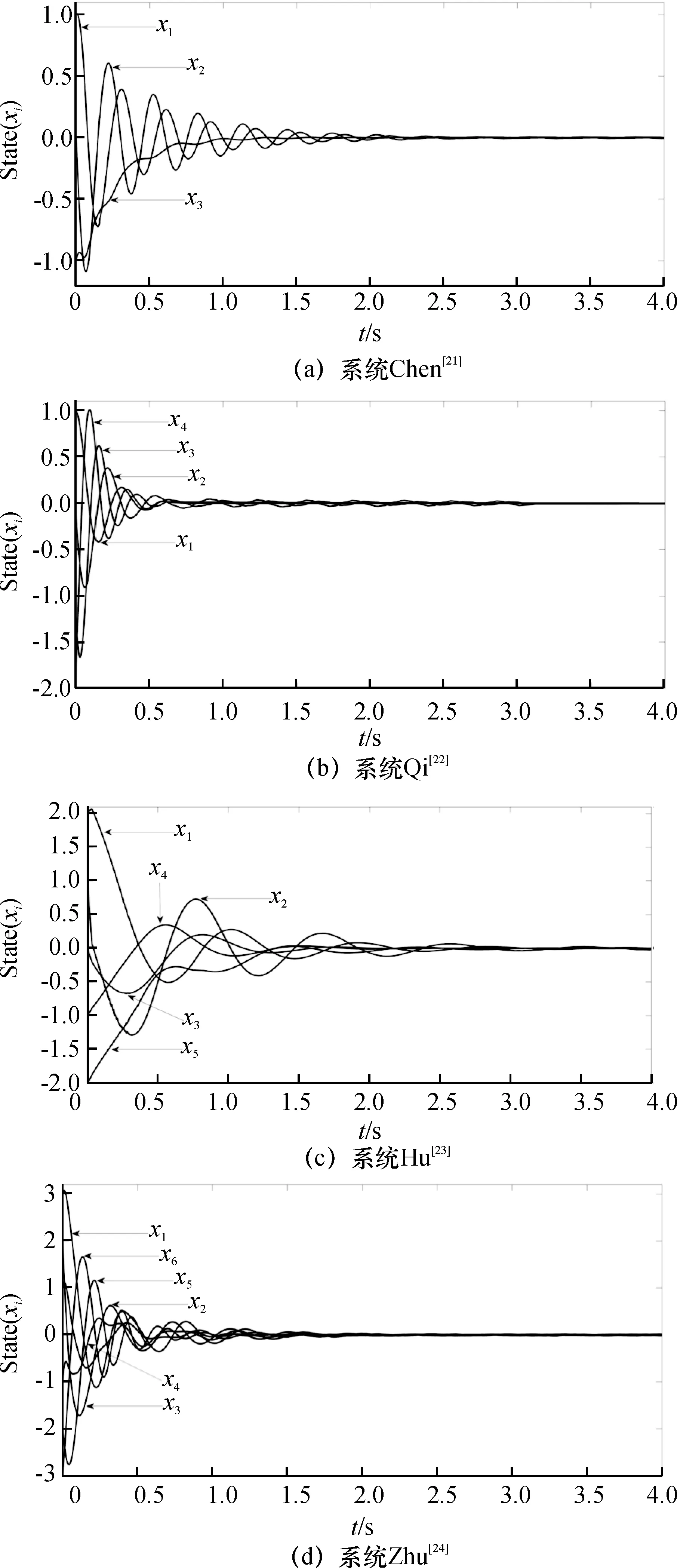
图2 非线性控制器(9)反馈镇定各混沌系统的数值仿真图
4 结论
反馈镇定混沌系统的过程引入量化机制后,闭环系统的稳定性和控制性能都可能发生变化,设计与量化器特性相关的非线性控制器,是实现和提高状态量化反馈控制系统稳定性的重要方法. 本文设计了一种含具有时变参数的量化器的非线性控制器,可以较好地反馈镇定一类非线性项含高次齐次函数的混沌系统.本文对超过40个的3到6维的此类混沌系统进行了数值仿真,验证了本文方法的适用性. 本文方法涵盖了文献[19]所采用的方法,使其成为本文方法的一个特例. 大数据时代的来临,使得混沌及其控制的数字化具有越来越重要的意义,而量化是数字化中最重要的一环,未来有必要对基于量化机制的混沌、复杂混沌网络及其控制过程进行更加深入的研究.
[1]YuW.Finite-timestabilizationofthree-dimensionalchaoticsystemsbasedonCLF[J].PhysicsLettersA, 2010, 374(30): 3021-3024.
[2]SunYJ,WuYB,WangCC.Robuststabilizationforaclassofnonlinearsystemsviaasingleinputcontrolapplicabletochaoticsystemsanditscircuitimplementation[J].Chaos:AnInterdisciplinaryJournalofNonlinearScience, 2013, 23(2): 023127.
[3]ZhangR,YangS.Stabilizationoffractional-orderchaoticsystemviaasinglestateadaptive-feedbackcontroller[J].NonlinearDynamics, 2012, 68(1-2): 45-51.
[4]ChenG,DongX.Onfeedbackcontrolofchaoticnonlineardynamicsystems[J].InternationalJournalofBifurcationandChaos, 1992, 2(02): 407-411.
[5]LiP,LiuYZ,HuKL,etal.Thechaoticcontrolontheoccasionalnonlineartime-delayedfeedback[J].InternationalJournalofModernPhysicsB, 2004, 18(17-19): 2680-2685.
[6]HammamiS,BenrejebM,FekiM,etal.FeedbackcontroldesignforRösslerandChenchaoticsystemsanti-synchronization[J].PhysicsLettersA, 2010, 374(28): 2835-2840.
[7]El-DessokyMM,YassenMT.Adaptivefeedbackcontrolforchaoscontrolandsynchronizationfornewchaoticdynamicalsystem[J].MathematicalProblemsinEngineering, 2012,Art.ID347210, 12pages.
[8]ChenG.Asimpleadaptivefeedbackcontrolmethodforchaosandhyper-chaoscontrol[J].AppliedMathematicsandComputation, 2011, 217(17): 7258-7264.
[9]CoutinhoDF,FuM,deSouzaCE.Inputandoutputquantizedfeedbacklinearsystems[J].AutomaticControl,IEEETransactionson, 2010, 55(3): 761-766.
[10]FuM,XieL.Finite-levelquantizedfeedbackcontrolforlinearsystems[J].AutomaticControl,IEEETransactionson, 2009, 54(5): 1165-1170.
[11]UshioT,HiraiK.Chaoticbehaviorinpiecewise-linearsampled-datacontrolsystems[J].InternationalJournalofNon-linearMechanics, 1985, 20(5): 493-506.
[12]UshioT,HsuCS.Simpleexampleofdigitalcontrolsystemswithchaoticroundingerrors[J].InternationalJournalofControl, 1987, 45(1): 17-31.
[13]DelchampsDF.Stabilizingalinearsystemwithquantizedstatefeedback[J].AutomaticControl,IEEETransactionson, 1990, 35(8): 916-924.
[14]EliaN,MitterSK.Stabilizationoflinearsystemswithlimitedinformation[J].AutomaticControl,IEEETransactionson, 2001, 46(9): 1384-1400.
[15]FagnaniF,ZampieriS.Quantizedstabilizationoflinearsystems:complexityversusperformance[J].AutomaticControl,IEEETransactionson, 2004, 49(9): 1534-1548.
[16]LiberzonD,HespanhaJP.Stabilizationofnonlinearsystemswithlimitedinformationfeedback[J].AutomaticControl,IEEETransactionson, 2005, 50(6): 910-915.
[17]DePersisC.Onfeedbackstabilizationofnonlinearsystemsunderquantization[C]∥DecisionandControl, 2005and2005EuropeanControlConference.CDC-ECC'05. 44thIEEEConferenceon. [S.l.]:IEEE, 2005: 7698-7703.
[18] Liberzon D. Quantization, time delays, and nonlinear stabilization[J]. Automatic Control, IEEE Transactions on, 2006, 51(7): 1190-1195.
[19] Tanasa V. Development of theoretical and computational tools for the design of control strategies for nonlinear sampled-data systems[D]. Paris: Université Paris Sud-Paris XI, 2012.
[20] Wang Y H, Fan Y Q, Wang Q Y, et al.Adaptive feedback stabilization with quantized state measurements for a class of chaotic systems[J]. Communications in Theoretical Physics, 2012, 57(5): 808.
[21] 陈玉霞,赵新渤. 一个新的三维混沌系统[J]. 郑州轻工业学院学报:自然科学版,2010,25(5):15-17,20.
Chen Y X, Zhao X B. A new three-dimensional chaotic system[J]. Journal of Zhengzhou University of Light Industry,Natural Science Edition, 2010, 25(5):15-17,20.
[22] Qi G, Du S, Chen G, et al. On a four-dimensional chaotic system[J]. Chaos, Solitons & Fractals, 2005, 23(5): 1671-1682.
[23] 胡国四. 一类具有四翼吸引子的超混沌系统[J]. 物理学报,2009,58(6):3734-3741.
Hu G S, A family of hyperchaotic systems with four-wing attractors[J]. Acta Physica Sinica, 2009, 58(6): 3734-3741.
[24] 朱建良,张博亚,孙鸣. 基于六维混沌的信号和图像加密研究[J]. 信息技术,2012(2):106-108,117.
Zhu J L, Zhang B Y, Sun M. Six-dimensional chaos based on signal encryption and image encryption[J]. Information Technology, 2012(2):106-108,117.
[25] Slotine J J E, Li W. Applied Nonlinear Control[M]. New Jersey: Prentice hall, 1991.
Stabilization for a Class of Chaotic Systems with Adaptive Quantizers
Zhai Yin-hu1,2, Wang Yin-he1, Fan Yong-qing3
(1. School of Automation;2. School of Information Engineering, Guangdong University of Technology, Guangzhou 510006, China;3. School of Automation, Xi'an University of Posts and Telecommunications, Xi'an 710121, China)
This paper investigates the asymptotical stabilization via state feedback for a class of chaotic systems with a quantizer connected on the input channel. The nonlinear terms in the dynamic equation of the chaotic system are represented as the homogeneous functions with arbitrary known orders. The quantizer has one adjustable time-varying parameter with the updated law to be designed, and thus it can quantify adaptively online the state variables of the chaotic systems according to control scheme. With the help of the updated law and adaptive law of estimated boundary error of quantization, the nonlinear adaptive controller is proposed in this paper to ensure the chaotic system to be stabilized asymptotically in the presence of the quantizer. Finally, some simulation examples are utilized to demonstrate the validity of the results in this paper.
chaotic systems; state feedback stabilization; adaptive quantizer; state quantization
2015- 01- 05
国家自然科学基金资助项目(61273219,61305098)
翟因虎(1974-),男,讲师,博士研究生,主要研究方向为复杂网络辨识与控制等.
10.3969/j.issn.1007- 7162.2015.03.006
TP273+.2
A
1007-7162(2015)03- 0028- 07
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
广东石油化工学院学报(2016年6期)2016-05-17
焊接(2016年2期)2016-02-27
中国铁道科学(2015年4期)2015-06-21
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
空间控制技术与应用(2010年3期)2010-12-23
燃气涡轮试验与研究(2010年4期)2010-04-16
现代农业科技(2009年19期)2009-03-20