基于DSP的超声波电机驱动器设计
2015-05-10 06:21裴高科高军礼陶地状刘海杰马锦坚
广东工业大学学报 2015年3期
裴高科,高军礼,陶地状,刘海杰,马锦坚
(广东工业大学 自动化学院,广东 广州 510006)
基于DSP的超声波电机驱动器设计
裴高科,高军礼,陶地状,刘海杰,马锦坚
(广东工业大学 自动化学院,广东 广州 510006)
在深入分析超声波电机(USM)驱动关键技术的基础上,基于TMS320F28027 DSP的增强性脉宽调制器模块(EPWM),采用推挽式驱动放大和并联匹配电感电路,设计USM驱动器,并通过Multisim软件平台进行计算机仿真.针对USM的启动特点,设计一种变频启动方式,实现USM驱动器的软硬件联合调试.实际应用效果良好.
超声波电机; 并联谐振; 数字信号处理器
超声波电机是近年来发展起来的一种新型微电机.传统的电机是基于电磁感应原理通过磁路之间的耦合,由磁场的变化产生磁力带动转子的旋转.与传统的电机不同,超声波电机没有绕组和磁极,它是在定子上加特定的高压高频电源,利用压电陶瓷片的逆压电效应所激发的微振动作为驱动力与转子之间的静摩擦力的耦合转换成移动体的旋转运动或直线运动[1-4].超声波电机具有响应速度快、重量轻、无电磁干扰、低噪音等优势,已被广泛应用在家庭办公、医疗、智能机器人等领域[1-6].
超声波电机的电压驱动范围一般为150~1 000 V(峰峰值).电机驱动频率在20~100 kHz之间可调,且工作频率应选在定子的谐振频率附近.当电机工作在谐振频率附近时可以近似地认为是容性负载,与外加匹配电感构成LC谐振电路一起进行滤波,从而可以得到适合于电机驱动的正弦波形.两相驱动信号的相位差一般在90°左右,利用相位差的正负变化调节电机的运动方向,从而实现USM的正/反转调速[1-6].
综上所述,USM驱动器应具备如下功能:(1) 输出准正弦波形;(2) 频率可调;(3) 幅值可调,能通过调节PWM控制信号的占空比来改变交流电压的幅值[4],以适合不同类型的超声波电机;(4) 相位可调.
1 USM驱动器硬件设计
本文所设计的USM驱动器的体系架构如图1所示.

图1 USM驱动电路结构框图
1.1 PWM单元
TMS320F28027是美国德州仪器公司推出的32位定点数字信号处理器(DSP),最高时钟频率达60 MHz.其增强性脉宽调制器模块(EPWM)尤其适合于电机的高性能控制.利用该模块所产生的两相频率和占空比均可调的PWM波形时序图如图2所示.当计数器计数值TBCTR等于TBPRD寄存器的值时,计数器重新计数,则
PWMcycle=2×TBPRD×TBCLK.
(1)
当计数器计数值等于0时,设定PWM输出引脚极性为高;当计数器向上计数并等于CMPA时,设置PWM输出引脚极性为低;则PWM波在计数值0-CMPA期间引脚电平为高,其余时间为低,即

(2)

图2 频率和占空比可调的PWM波
由EPWM模块所生成的两相相位可调的PWM波形的时序图,如图3所示.
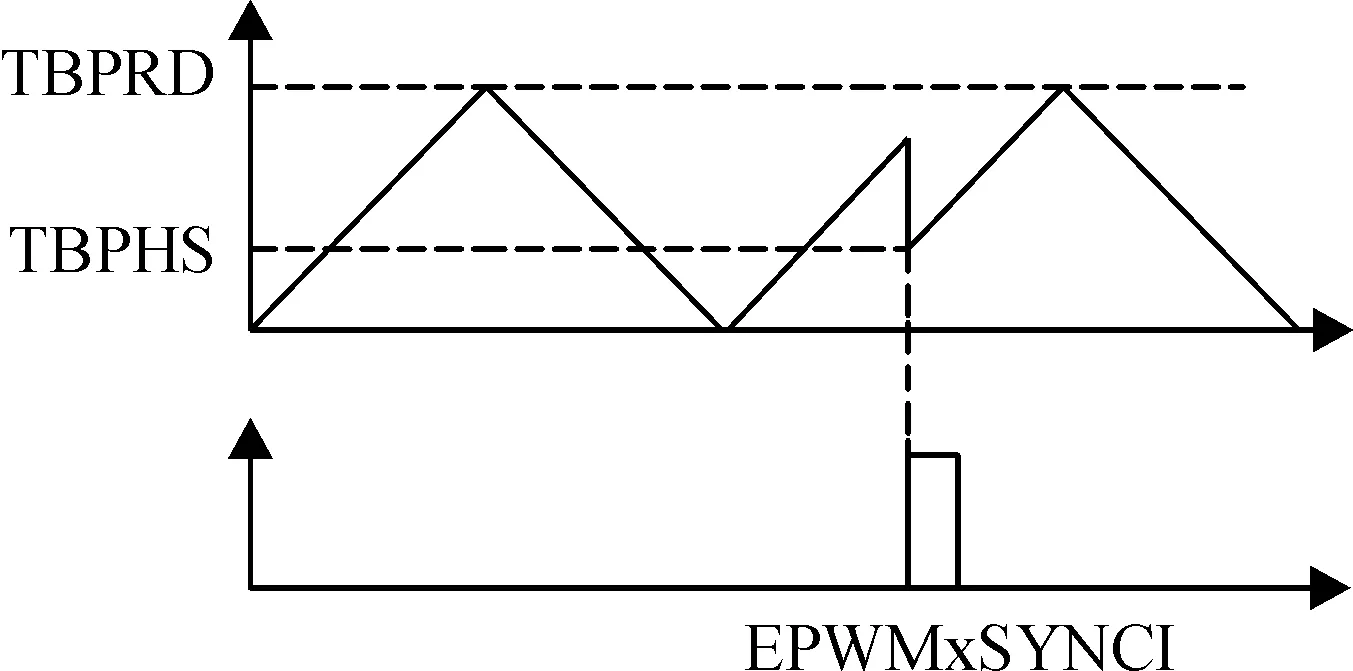
图3 相位差可调的PWM波
由图3可知,当有EPWMxSYNCI信号时,计数器TBCTR的计数值立即从当前值变成TBPHS寄存器的值,通过预设TBPHS寄存器的值即可改变两相相位差,即

(3)
例如产生波形频率为41 kHz,占空比为24%,相位差为90°的方波,通过式(1)~(3)得,所需各个寄存器的值为
CMPA=TBPRD×24%×2=350,
CMPB=TBPRD-CMPA=380.
由于通过以上设置后相位差为90°,故可以不用预设TBPHS的值.如需改变相位差,只需实时动态更改TBPHS的值即可.基于下列DSP程序所产生的PWM波,如图4所示.
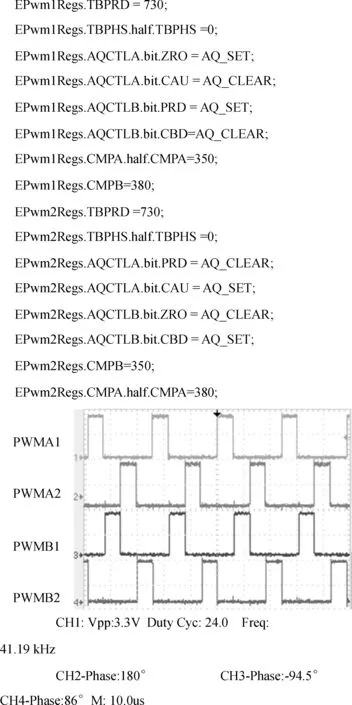
图4 TMS320F28027 EPWM输出波形
1.2 驱动放大电路设计
本文所设计的USM推挽式驱动电路,如图5所示[3,7-8].电源电压VCC为12V,IRS2101S为推挽式MOS管H桥专用驱动芯片,变压器磁芯为EE型,变比为1∶24.

图5 USM推挽式驱动放大电路
1.3 匹配电路设计
超声波电机的等效电路,如图6所示,其中Cd是压电陶瓷的夹持电容,Lm是定子的等效电感,Cm是定子弹性等效动态电容,Rm是定子内机械损耗的等效电阻[9-10].
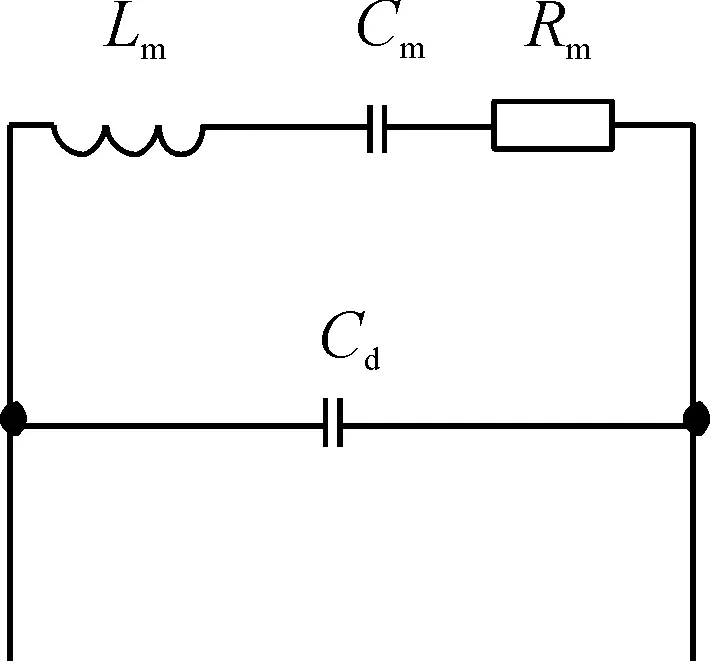
图6 USM等效电路
用Y表示电路的导纳,则
Y=
(4)
借助于精密阻抗分析仪,通过实验可以测试出在不同频率下的导纳值.通过式(4)计算出各个具体参数的值,从而可以得到最大导纳和最小导纳所对应的频率值,由此确定超声波电机的正常工作频率.从式(4)可以得出,当USM工作在谐振频率时,压电振子振动幅度最大,对应于等效电路中等效电容也较大,系统总体呈容性[4,11],所以必须采用电感进行功率匹配.电感匹配不仅可以减少无功损耗,提高系统的输出功率,同时匹配电路还可以滤掉开关电路方波中的谐波,得到信号的基波[6,12],从而改善输出电压波形.
理想变压器副边线圈输出的对称PWM波形,如图7所示.

图7 变压器副边线圈输出波形
将图7中所示的对称波形进行傅里叶级数展开:
(5)
其中,A为振幅,T为周期,ω为基波角频率.
式(5)表明,方波中含有奇数次的高频谐波,主要是三次谐波.匹配电路的目的就是为了滤掉方波中的三次谐波,得到正弦的基波.本文所设计的超声波电机并联匹配电路如图8所示.
图8 超声波电机并联匹配电路
基于Multisim仿真平台,对该电路进行计算机仿真.等效电路的谐振频率为41 kHz,匹配电感为4.7mH.仿真结果如图9所示,以方波作为驱动信号,经过匹配电路以后输出电压波形为正弦波,可以满足超声波电机以正弦波作为驱动信号的要求[13-16].

图9 方波驱动和匹配电感后波形
2 USM驱动器软件设计
超声波电机内部压电陶瓷材料的非线性以及电机惯性[4-5,17],使得超声波电机难以高转速直接启动,为此专门设计了一种变频启动方式.在启动阶段,采用高频低速启动,等待电机运行稳定以后,再切换至正常的运行频率.系统主函数和中断函数的执行流程分别如图10和图11所示.

图10 主函数程序流程图
3 系统应用
以60 mm的环形行波型超声波电机为测试对象,系统应用平台如图12所示.
在空载情况下,驱动器施加到USM上的驱动波形如图13所示.在图13中,两相驱动波形频率为41kHz,两相相位相差约为93.7°,电机驱动端的峰峰值为466V.在本文所设计的USM驱动器的驱动之下,USM的启动性能良好,响应速度快,运行稳定.其中,匹配电感Lp=4.7mH.

图11 中断函数程序流程图

图12 系统应用平台
CH1:Vpp:466V Freq: 41.16kHz Duty Cyc: 50.7
4 结束语
基于TMS320F28027 DSP、推挽式驱动放大和并联匹配电感电路,设计了一款USM驱动器,并通过Multisim平台进行了计算机仿真与验证.对频率、占空比和相位可调的PWM信号产生单元进行了详细的理论分析与工程实现.本文所设计的USM驱动器内嵌软件变频启动方式,具有启动性能良好、响应速度快、运行稳定的特点.
[1] 金龙,褚国伟,王心坚,等. 基于DSP的超声波电机控制系统[J].电工技术学报, 2004,19(8):93-98.
Jin L, Chu G W ,Wang X J,et al. A DSP-based control system for ultrasonic motors[J]. Transactons of China Electrotechnical Society, 2004,19(8):93-98.
[2] 陈维山,方艳,谢涛. 基于DSP的行波型超声波电机的驱动与控制[J]. 研究探讨, 2005, (8):40-42.
Chen W S, Fang Y, Xie T. DSP-based drive and control system for traveling-vave ultrasonic motors[J]. Research & Discussion, 2005, (8):40-42.
[3] 史敬灼,候义铭. 超声波电机低成本驱动电路[J].电气传动,2007,37(1):62-64.
Shi J Z, Hou Y M. Low-cost driving circuit for ultrasonic motor[J].Electric Drive, 2007,37(1):62-64.
[4] 史敬灼. 超声波电机运动控制理论与技术[M]. 北京: 科学出版社, 2011.
[5] 俞浦,李华峰,黄卫清.超声电机LLCC 谐振电路研究[J].中国电机工程学报,2011,31(24):105-110.
Yu P, Li H F, Huang W Q. Study on driving circuit of ultrasonic motor with LLCC resonant technique[J]. Proceedings of the CSEE, 2011,31(24):105-110.
[6] 赵淳生. 超声电机技术与应用[M].北京:科学出版社,2007.
[7] 唐雄民,李思琪,孟志强.并联负载谐振式DBD型臭氧发生器供电电源的研究[J].广东工业大学学报,2013,30(1):81-86.
Tang X M, Li S Q, Meng Z Q. Research on parallel load resonant inverters for dielectric barrier discharge ozone generators[J]. Journal of Guangdong University of Technology,2013,30(1):81-86.
[8] 左畅. 基于TMS320F2808的全桥三电平LLC谐振变换器的研究[D].广州:广东工业大学信息工程学院,2013.
[9] 俞浦,李杰,周琳琦,等. 超声电机推挽式驱动电路研究[J].微电机,2011,44(6):40-43.
Yu P,Li J,Zhou L Q,et al. Study on the push-pull driving circuit of ultrasonic motor[J]. Micromotors, 2011,44(6):40-43.
[10] 顾菊平,胡敏强,石 斌,等. 超声波电机谐振升压式驱动技术研究[J]. 中国电机工程学报,2002,22(8):50-52.
Gu J P, Hu M Q, Shi B, et al. Research on the resonant booster of ultrasonic motor driving[J]. Proceedings of the CSEE, 2002,22(8):50-52.
[11] 龙涛元,宋国翠,杨立宏. 高效超声电机驱动电源研究[J]. 电工电气,2010(12):21-24.
Long T Y, Song G C, Yang L H. Study on high-efficiency ultrasonic motor-driving power supply[J]. Jiangsu Electrical Apparatus, 2010(12):21-24.
[12] 陈树琛,张淼,吴文康,等. 基于LCC多路LED均流驱动电路的研究[J].广东工业大学学报,2013,30(2):57-62.
Chen S C, Zhang M, Wu W K,et al. A current balancing method for multi-output LED drivers based on LCC resonant convertors[J].Journal of Guangdong University of Technology,2013,30(2):57-62.
[13] 田健仲,袁惠梅,张俊方,等. 并联谐振电路Q值计算方法与仿真分析[J]. 实验技术与管理,2010,27(9):36-38.
Tian J Z , Yuan H M, Zhang J F , et al. The calculation methods and the simulation analysis of Q quality in parallel-resonant circuit[J]. Experiment al Technology and Management, 2010,27(9):36-38.
[14] 汪小娜,单潮龙,王向军,等. RL与C并联谐振电路品质因数精确值的计算[J].大学物理,2011,30(3):30-33.
Wang X N,Shan C L,Wang X J,et al. Calculation of quality factor of RL and C parallel resonance circuit[J]. College Physics,2011,30(3):30-33.
[15] 吴凌燕,郭维波,陈健滨. 基于Mulitisim的并联谐振电路特性的研究[J]. 计量与测试技术,2011,38(10):56-57.
Wu L Y, Guo W B, Chen J B. Research of antiresonance circuit based on mulitisim[J]. Metrology & Measurement Technique, 2011,38(10):56-57.
[16] 石嘉顺. 基于Multisim环境下的电路设计与仿真[J].计算机仿真,2007,24(12):306-308.
Shi J S. Design&simulation of the circuit based on multisim[J]. Computer Simulation, 2007,24(12):306-308.
[17] 张炎,宋爱国,王心坚,等. 一种行波超声波电机低速控制的方法[J]. 东南大学学报,2008,38(3):429-433
Zhang Y, Song A G, Wang X J, et al. Low speed control of traveling—wave ultrasonic motor[J]. Journal of Southeast University, 2008,38(3):429-433.
Design of Ultrasonic Motor Driver Based on DSP
Pei Gao-ke, Gao Jun-li, Tao Di-zhuang, Liu Hai-jie, Ma Jin-jian
(School of Automation, Guangdong University of Technology, Guangzhou 510006, China)
After analyzing the key techniques on the ultrasonic motor (USM) driving, this paper designs USM driver by the push-pull amplifier and parallel matching inductance circuit based on the enhancement pulse width modulator module (EPWM) of TMS320F28027 DSP. And then this design is tested under the computer simulation on the Multisim software platform. According to the characteristics of USM start, a frequency conversion start mode is also configured. Then, the software and hardware joint debugging on the USM driver is implemented which proves effective and satisfactory.
ultrasonic motor; parallel resonant; digital signal processor
2014- 02- 28
国家级大学生创新实验资助项目(201211845014);广东省质量工程资助项目(261541102)
裴高科(1988-),男,硕士研究生,主要研究方向为运动控制技术.
高军礼(1973-),男,副教授,主要研究方向为电力电子及运动控制技术.E-mail:jomnygao@163.com
10.3969/j.issn.1007- 7162.2015.03.018
TM359.9
A
1007-7162(2015)03- 0097- 05
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
电脑爱好者(2020年6期)2020-05-26
北京航空航天大学学报(2017年5期)2017-11-23
光学精密工程(2016年5期)2016-11-07
中国环境监察(2016年7期)2016-10-23
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
城市轨道交通研究(2015年3期)2015-02-27