
基于小波图像预处理的运动目标检测方法
2015-05-09 03:48贾继红郭向阳
军事交通学院学报 2015年10期
贾继红,郭向阳
(1.军事交通学院 军事物流系,天津300161;2.军事交通学院学员旅,天津300161)
当前,机器视觉技术对静态目标的检测已经相当完善,但针对“动对动”的运动目标检测,无论理论还是应用都不成熟,成为当前研究的主要方向。目前,采用的方法侧重于算法应用,国内的主要方法大多是先补偿全局运动,使动态背景转化为静态背景,再利用帧差法或背景差法检测运动目标[1]。该类方法仅仅是把运动目标识别出来,并没有给出运动目标的位置。对于运动目标位置的判定,现有文献主要提供了3类较为有效的方法:一是以激光干涉仪为基础测量柔性坐标来实现[2];二是在一种嵌入式彩色视频应用平台上应用小波变换实现图像分离、特征提取以及目标定位的算法[3];三是利用仿生学视觉系统捕捉目标特征,用Matlab软件处理图像,再通过单、双目标定法标定[4]。这3种方法均需要昂贵的硬件设备和复杂的算法,不适于成本低廉的服务型机器人使用。
本文研究餐饮服务机器人的主动避让问题。该类机器人避让的对象主要是人,故运动目标定为行人。本文提出一种不依赖于硬件实现的简洁算法,判定行人与机器人之间的相对位置关系。但该算法的实时性依赖于图像的前期预处理,其中,处理海量数据是关键。为了缩短数据处理时间,最行之有效的途径有两种:一是压缩图像数据,只保留有用信息;二是尽量简化算法,从而减少迭代次数和运算时间。
1 图像预处理
考虑复杂背景图像普遍存在信噪比低、噪声较大、背景干扰严重等缺点,选用小波变换理论对图像进行预处理,即完成图像的压缩和分割。
1.1 基于小波变换的图像压缩
基于小波变换的压缩方法很多,较成熟的方法有小波包变换方法、小波域纹理模型方法、小波变换零树压缩和小波变换向量压缩等,这些方法对图像压缩都是十分有用的工具。田苗苗[5]经研究与实验仿真,证明了小波包可以对信号的高频部分做更细致的刻画,对信号的分析能力更强,故本文采用小波包变换的方法压缩图像。经验证压缩效果较好(如图1所示)。

图1 小波包压缩效果
1.2 基于小波变换的图像分割
目前,用于图像分割的算法有很多,但各自针对的图像特点和应用范围不同。对于运动目标而言,为满足运动目标被动定位的实时性要求,要求算法计算量要小,因而分割算法不宜太复杂。同时,由于目标图像随目标所处环境的变化而不断变化,所以要求分割算法应具有一定的自适应能力,以满足目标对环境条件的变化[6]。
基于小波变换的图像分割方法主要有边缘检测和角点检测。吉李满等[7]提出了一种基于小波变换的角点检测算法,将双正交小波用在提取角点的前期处理中,既克服了直接从灰度图像中提取角点所带来的算法复杂、耗时长的缺点,又克服了一般边缘提取算法所带来的噪声敏感问题。
本文图像分割采用OpenCV来实现,因为,OpenCV可以在多种操作系统上运行,同时为其他软件提供多种接口[8]。分割效果如图2所示。

图2 自适应阈值法特征提取效果
2 运动目标位置检测方法
目前,国内用于运动目标位置检测的方法并不多,且绝大多数都依托于跟踪系统或仿生结构等硬件设备实现,成本较高。本文主要针对服务机器人,面对的运动目标大多是行人,移动速度基本是人类步行的速度。考虑机器人的功能特点和应用范围,适合采用成本不高且快速有效的方法实现运动目标或行人的位置检测。故此,提出一个简单易行的算法。
2.1 相机的安装位置
相机镜头的焦距与视角成一定几何关系,焦距越小视角越宽。所以,对于智能机器人,可根据相机的视角来调整相机的位置,使获取的图像背景完全为地面信息,从而简化行人背景,以便准确获取行人的位置信息并提高处理速度。本文通过提取行人的动态轮廓,利用行人脚尖位于照片中的方位来确定行人在实际环境中的位置。这需要调整相机镜头,使镜头视角全部投影在地面上,以便机器人获取的图像全部为行人的位置。
在实际安装过程中,相机镜头倾斜面向地面,使镜头的视角全部覆盖在地面上,不拍摄其他环境(如图3所示)。
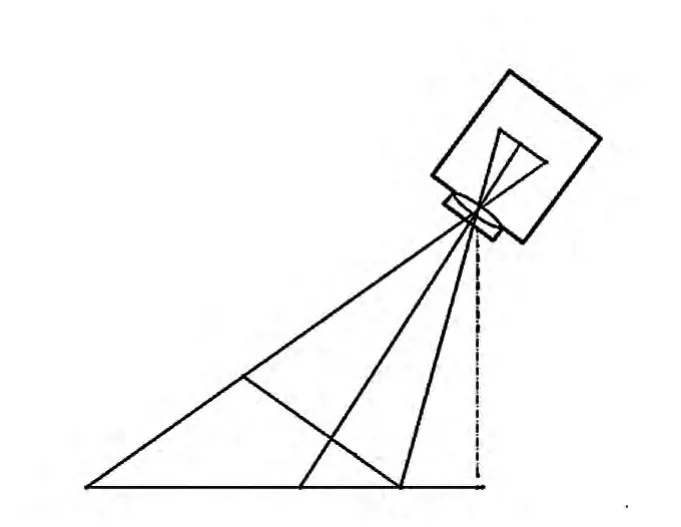
图3 照相机视觉几何关系
2.2 人与机器人之间距离的测定
根据相机的安装位置,得到如图4所示的几何关系,利用光线的路径、行人位置和行人在照片中的成像位置3者之间的几何关系,可以推导出行人与机器人之间的距离。
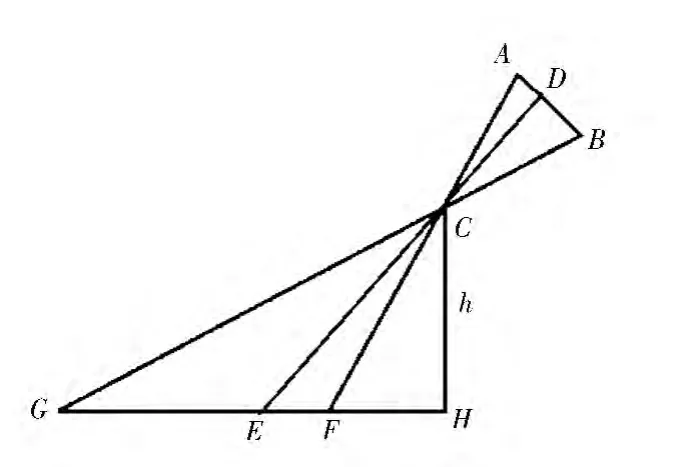
图4 人机像3者几何关系
图中:C点为相机镜头的位置;h为镜头距离地面的高度;直线AB为相机的采光板;E点为行人的实际位置;D点为照片中行人的位置。则行人与机器人之间的距离为

2.3 人与机器人相对位置关系的判定
要实现机器人的主动避让,仅仅测得行人与机器人的距离是不够的,还要测出行人与机器人之间的位置关系。可通过对行人脚尖位置的检测来判定行人与机器人的相对位置。俯视相机与行人的几何关系如图5所示。

图5 俯视相机光线几何关系
图中:E点为行人脚尖的位置;B点为行人脚尖在照片中的位置;x为行人与机器人之间的距离;FE与AH平行。由相似原理可推出:

已知镜头的视角为∠GCD=i,由三角定理可得

由式(1)、(2)可得

若AB/AH可求,则可得到FE。以图2为例,相机所得照片的像素为1 282×596,行人脚尖的位置为735×292,则

当FE大于机器人本身宽度时,机器人不需要躲避,可按原路线继续行走。当FE小于机器本身宽度时,机器人需要主动避让行人:当AB/AH<0.5 m时,说明行人位于机器人的左侧,机器人需要向右移动来躲避行人;当AB/AH>0.5 m时,行人位于机器人的右侧,机器人需要向左移动来躲避行人。
3 结语
本文针对运动目标检测中处理海量数据耗时过长和现有算法过于复杂,不适于服务型机器人的问题,主要完成两项工作:
(1)采用相同数学工具——小波变换法进行预处理。本文对图像压缩和图像分割的现有方法进行了仿真验证,根据仿真效果选出了适于本实验的图像压缩和图像分割方法。
(2)利用目标成像位置与实际位置的几何关系,以及位置与像素之间的关系,提出一种简洁算法,利用该算法能快速检测出行人与机器人之间的距离。最后,依据成像原理及已获得的“人机距离”,提出一种判定行人与机器人相对位置关系的算法,依据该算法可准确判定二者的位置关系,指示机器人做出主动避让。经实验验证,该方法所测得的位置精度可控制在0.5 m内。
[1] 孙斌,黄神治.移动背景下运动目标检测与跟踪技术研究[J].电子测量与仪器学报,2011,25(3):206-209.
[2] 陈文磊.激光跟踪仪控制系统研究[D].天津:天津大学,2012:3-4.
[3] 顾海军.嵌入式彩色电视跟踪系统的设计和实现[D].长春:中国科学院长春光学精密机械与物理研究所,2003:1-112.
[4] 型强.仿昆虫复眼结构的运动目标位置检测[D].南京:南京航空航天大学,2010:4-5.
[5] 田苗苗.小波分析和小波包在图像压缩中的应用[J].安徽科技学院学报,2009,23(5):32-34.
[6] 陈恩科,刘上乾,麻彦轩,等.一种新的运动目标自适应图像分割算法[J].西安电子科技大学学报(自然科学版),2008,35(3):490-493.
[7] 吉李满,陈贺新,桑爱军.基于小波变换的运动目标特征提取[J].微计算机信息,2008,24(3):300-302.
[8] 雷建锋,汪伟.基于OpenCV的图像阈值分割研究与实现[J].现代电子技术,2013,36(24):73-76.
猜你喜欢
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
意林(2021年5期)2021-04-18
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
作文小学中年级(2020年6期)2020-07-24
扬子江(2019年1期)2019-03-08
小天使·一年级语数英综合(2017年6期)2017-06-07
汽车与安全(2016年5期)2016-12-01
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
