
螺旋桨工作模式对四桨船操纵性影响试验研究
2015-05-08 11:50王慧婷
船海工程 2015年6期
王慧婷,毕 毅
(海军工程大学 舰船工程系,武汉430033)
螺旋桨工作模式对四桨船操纵性影响试验研究
王慧婷,毕 毅
(海军工程大学 舰船工程系,武汉430033)
针对四桨船航行过程中存在着四桨工作、两内桨工作外桨自由或者两外桨工作内桨自由的情况,在开阔静水水域中进行了大尺度自航模回转试验和Z形试验,对比分析了不同螺旋桨工作模式下自航模型操纵运动规律。结果表明,两内桨工作时的回转性指数、转艏指数比四桨工作时高,四桨工作时比两外桨高;两内桨工作时的应舵指数比四桨工作时低,四桨工作时比两外桨低。因此,两内桨工作模式下自航模的回转性、稳定性、应舵性均优于四桨及两外桨工作模式下的值。
四桨船;螺旋桨工作模式;自航模试验;操纵性
船舶操纵性是船舶重要的水动力性能之一,它是船舶在控制装置的作用下,保持或改变船舶运动状态包括航向、航速和位置等的能力。预报操纵性一般有3种方法:半理论半经验估算[1]、自航模试验[2]和计算机数值模拟方法[3-5]。半理论半经验方法是基于大量的约束模系列试验结果,建立水动力导数数据库或回归公式,应用这些公式对船舶的水动力导数进行估算,但该方法的有效性受船型限制;计算机数值模拟的方法受数值计算方法、操纵性运动数学模型以及水动力导数的求解精度等各方面因素的影响;相对而言,大尺度自航模试验是船舶操纵性预报中较为可靠的方法,已得到广泛的应用[6]。
随着船舶装载量的大幅增加,以及对船舶快速性及操纵性的要求提高,出现了四桨双舵这种船型,其操纵性能与常规单桨单舵船、双桨双舵船有较大的差异。然而,目前国内外对于单桨单舵船及双桨双舵船的操纵性能研究较多[7-9],而对四桨双舵船的操纵性能研究相对较少,研究主要集中在四桨双舵船静水中操纵运动仿真[10-15]、不同螺旋桨工作状态时船舶操纵运动性能的数值分析[16],研究中缺少自航模型试验的验证。基于此,本文通过模型试验的方法对四桨双舵船的操纵性能进行研究,并对比分析不同螺旋桨工作模式下的船舶操纵运动规律。
1 自航模试验
1.1 试验模型与控制系统
该自航模型采用玻璃钢材料制作,量纲一的量化主要参数见表1。船后对称布置四桨两舵,舵位于内桨的正后方。桨舵相对位置见图1,其中L为船模总长。
自航模控制与数据采集系统由岸基控制系统、船载控制及运动参数采集系统和船载执行系统构成,采用无线通讯设备实现岸基上位机和自航模下位机之间的数据传输,完成对自航模的控制。下位机负责记录各种即时数据,上位机接收并显示下位机传回的各种实时状态数据,主要有:经度坐标、纬度坐标、航向角、航向角速度、航速、舵角、横倾角等。
1.2 试验内容
自航模试验在木兰湖开阔水域中进行,水深15~20 m,蒲氏二级风以下。本试验设计了3种不同螺旋桨的工作模式:四桨、两内桨及两外桨工作,开展了航速为1.502 m/s时的自航模回转试验和Z形试验,向右打舵时舵角为正。
1.3 试验数据处理方法
根据上位机所接收的数据,画出各参数的时历曲线,图2为自航模四桨工作、时回转运动中各参数的时历曲线,图3为自航模四桨工作、时横倾角φ的时历曲线。可以看出:回转运动稳定后,各参数均达到稳定,但受风、流等因素的影响,有略微的波动,取值时均取平均值。自航模进入回转后,航速逐渐降低,待运动稳定后,航速也趋于稳定,取值时取其稳定值。对于横倾角,打舵后自航模首先向回转圈内侧横倾,随后由向回转圈内侧横倾变为向外侧横倾。向外侧横倾过程中所达到的最大值即为最大横倾角,稳定后的横倾角即为稳定横倾角,当舵角较小时,最大横倾角不是特别明显。
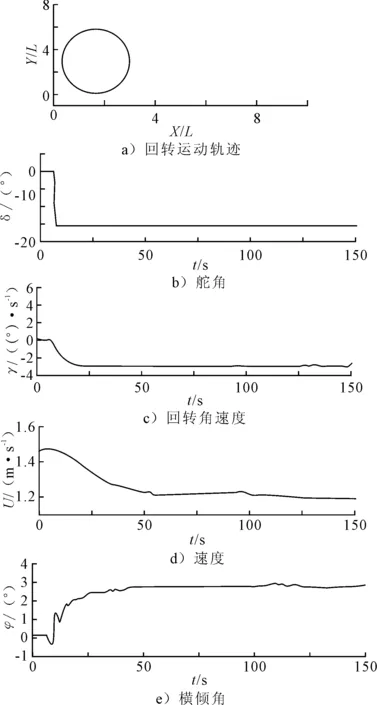
图2 回转运动中各参数的时历曲线 (U0=1.502 m/s,δ=-15°)
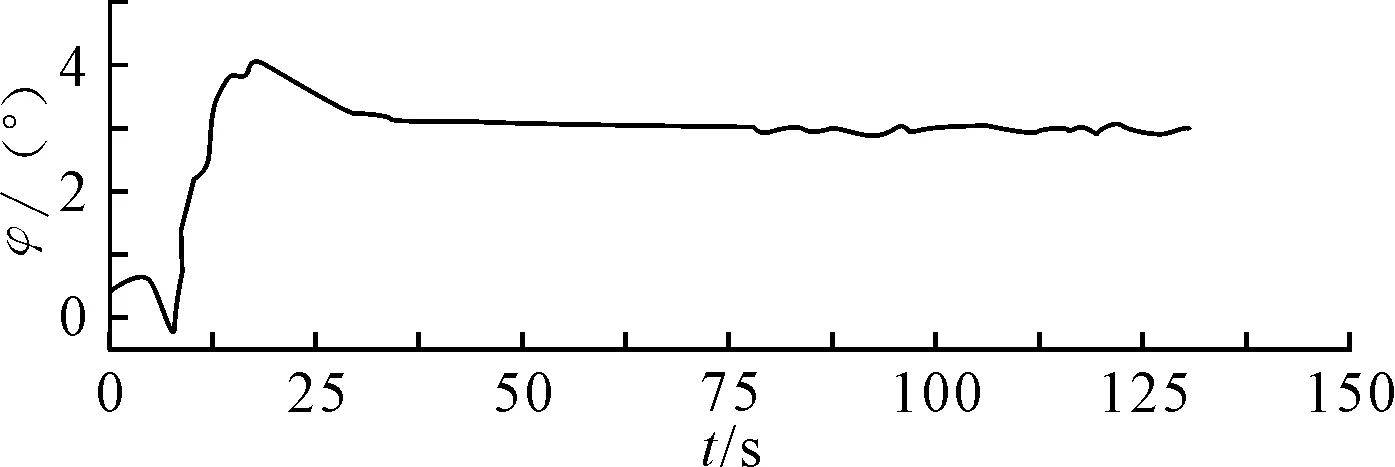
图3 横倾角的时历曲线 (U0=1.502 m/s,δ=-35°)

图4 Z形试验艏向角Ψ和舵角δ时历曲线
2 试验结果分析
2.1 回转试验
图5~图9为四桨、两内桨及两外桨工作时各回转运动参数随舵角的变化情况。
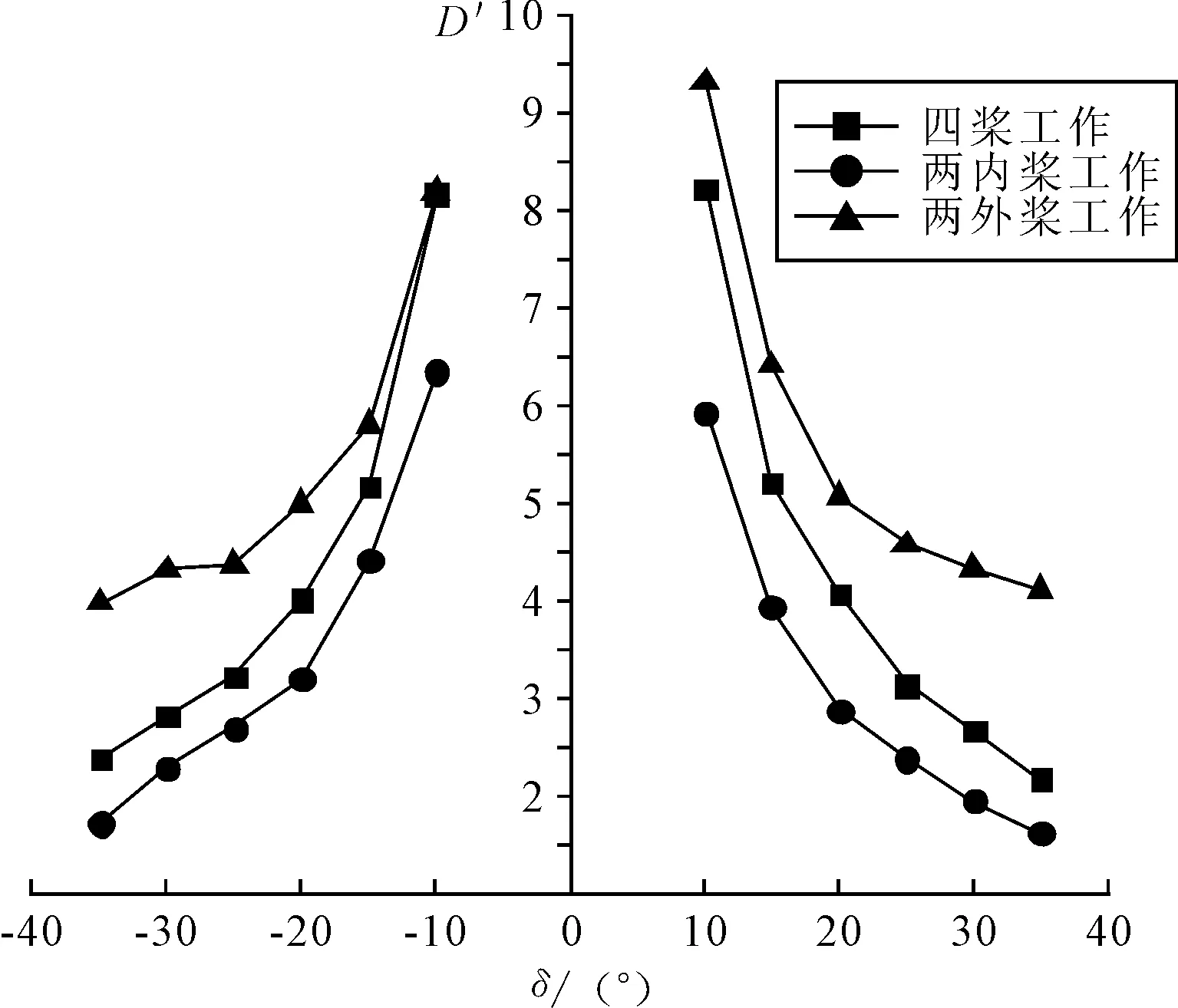
图5 无因次定常回转直径D′随舵角δ的变化
由图5可知:同一螺旋桨工作模式下,随着舵角的增加定常回转直径显著降低。四桨工作时,左右舵无因次定常回转直径D′随舵角δ的变化曲线呈现良好的对称性,而两内桨、两外桨工作时,左右舵所得结果有略微差别。这是因为在开阔水域中进行试验,受风、流等的影响,但这种影响是很小的,综合分析时取左右舵无因次定常回转直径的平均值。四桨工作时的回转直径介于两内桨与两外桨之间,在小舵角情况下,四桨工作时的回转直径更接近于两外桨工作时,而在大舵角下其更接近于两内桨工作时。在相同舵角的条件下,两内桨工作时的无因次定常回转直径比四桨工作时低17.5%~23.5%,比两外桨工作时低28.2%~52.1%。这主要是由于舵位处于内桨的正后方,受螺旋桨尾流速度的影响,提高了舵的来流速度,增大了舵在回转过程中产生的水动力。
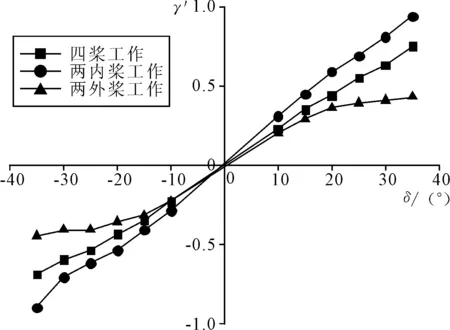
图6 无因次定常回转角速度γ′随舵角δ的变化
由图6可见,同一螺旋桨工作状态下,随着舵角的增加定常回转角速度显著增加。两内桨工作时曲线斜率最大,两外桨工作时曲线斜率最小。在小舵角情况下,四桨工作时的回转角速度与双外桨工作时很接近,而随着舵角的增加两者间的差值增大。在相同舵角的条件下,两内桨工作时的无因次定常回转角速度比四桨工作时高20.2%~30.4%,比两外桨工作时高39.5%~109.1%。由于,可得两内桨工作时回转直径最小,两外桨工作时最大,因此,进一步验证了图5中反映出的不同螺旋桨工作状态下的回转直径变化规律。
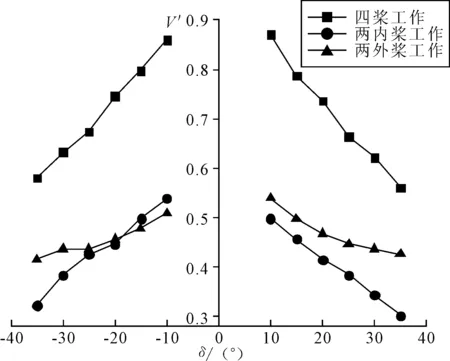
图7 定常回转速降系数随舵角δ的变化
由图7可见,同一螺旋桨工作状态下,随着舵角的增加,定常回转速降显著降低。V′=Vs/V0,Vs为定常回转时的航速,V0为直线航行时的航速,V′较大时表示速度降低较少,V′较小时表示速度降低较多。在向左打小舵角、两内桨和两外桨工作时,风流对速降产生轻微的影响。在小舵角情况下,两内桨工作时的回转速降与两外桨工作时很接近,而随着舵角的增加两者间的差值增大。在相同舵角的条件下,两内桨工作时的定常回转速降系数比四桨工作时低37.8%~43.1%,比两外桨工作时低0.9%~24.1%。
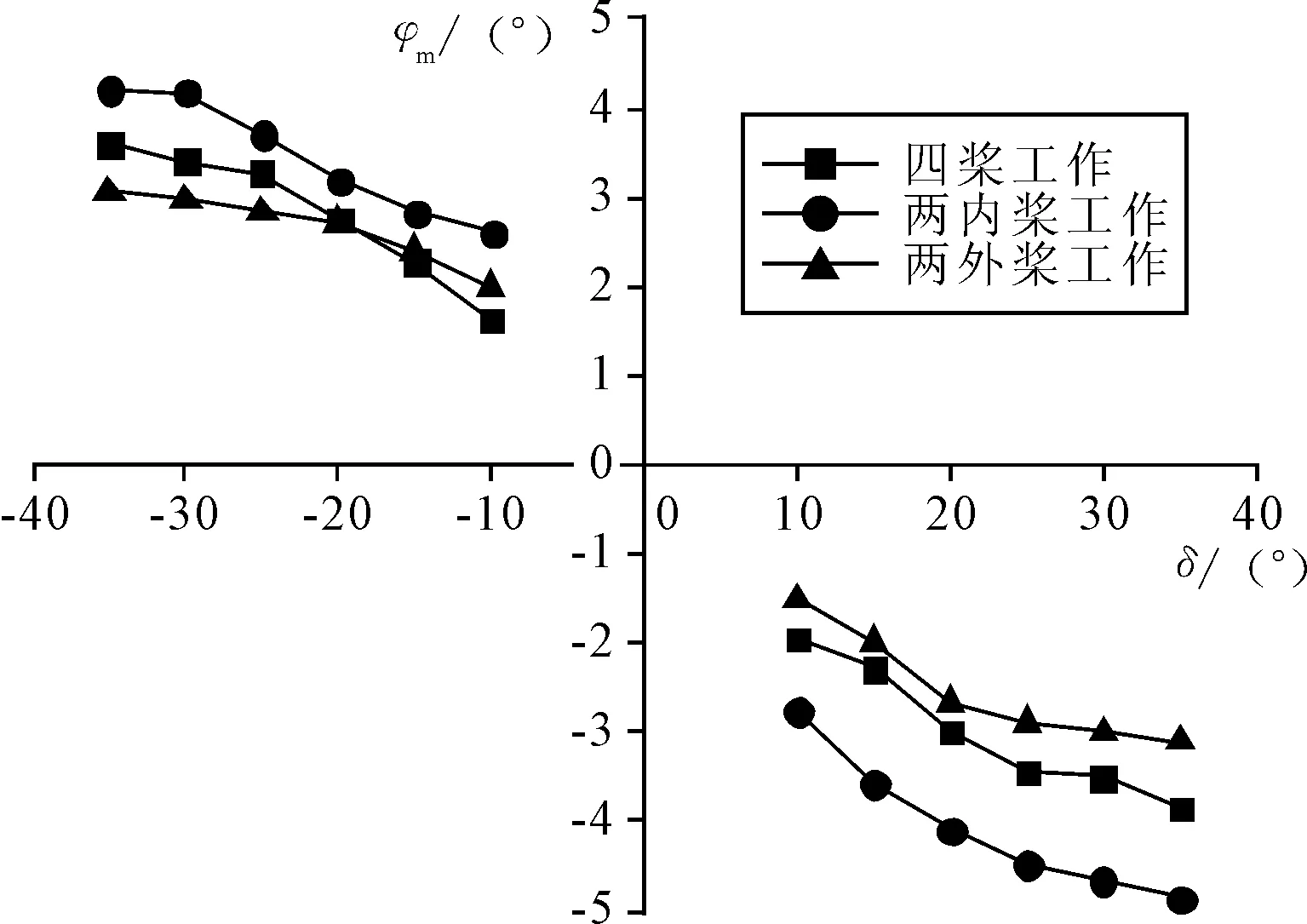
图8 最大横倾角φm随舵角δ的变化

图9 稳定横倾角φs随舵角δ的变化
由图8、9可知:回转过程中稳定横倾角的变化规律和最大横倾角的变化规律相似,最大横倾角为稳定横倾角的1~1.55倍。随着舵角的增加,稳定横倾角均先增加后减小,在δ=20°~25°时,稳定横倾角达到极大值。在相同舵角的条件下,两内桨工作时的最大横倾角比四桨工作时高21.5%~50.1%,比两外桨工作时高35.3%~53.1%;两内桨工作时的稳定横倾角比四桨工作时高9.2%~38.1%,比两外桨工作时高17.9%~42.9%。当自航模进入定常回转后,稳定横倾角
式中:ZG——重心垂向高度;ZH——水动力作用点垂向高度。
通过图5、图7中3种螺旋桨工作状态下的回转直径和回转速降的规律,进一步验证了稳定横倾角的变化规律。
2.2 Z形试验
表2~表4为四桨、两内桨及两外桨工作时各运动参数随舵角δ的变化情况。
表2为3种螺旋桨工作状态下的无因次回转性指数K′随舵角δ的变化情况。由表可知:舵角δ由10°增加到20°,无因次回转性指数K′明显降低;在相同舵角的条件下,两内桨工作时的回转性指数比四桨工作时高14.2%~14.3%,比两外桨工作时高22%~38%。回转性指数越大说明该工作模式下回转性能越好。

表2 无因次回转性指数随舵角δ的变化
表3为3种螺旋桨工作状态下的无因次应舵指数T′随舵角δ的变化情况。由表可知:舵角δ由10°增加到20°,无因次应舵指数T′明显降低;在相同舵角的条件下,两内桨工作时的应舵指数比四桨工作时低16.7%~17.6%,比两外桨工作时低57.3%~61.8%。应舵指数越小则转首时船对操舵响应越快,则应舵性越好。同时,稳定性指数T越小,则航向稳定性越好。
表4为3种螺旋桨工作状态下的转首指数P随舵角δ的变化情况。由表可知:各工作状态下的转首指数P均比较稳定,在相同舵角的条件下,两内桨工作时的转首指数比四桨工作时高36.9%~38.8%,比两外桨工作时高219.7%~221.6%。转首指数越大,船的转首性越好,则船越容易改变航向。这主要是因为转首指数仅与舵效及船的摇艏惯性有关,两内桨工作时船的舵效较大,速降较小则惯性较大,因此,转首指数较大。
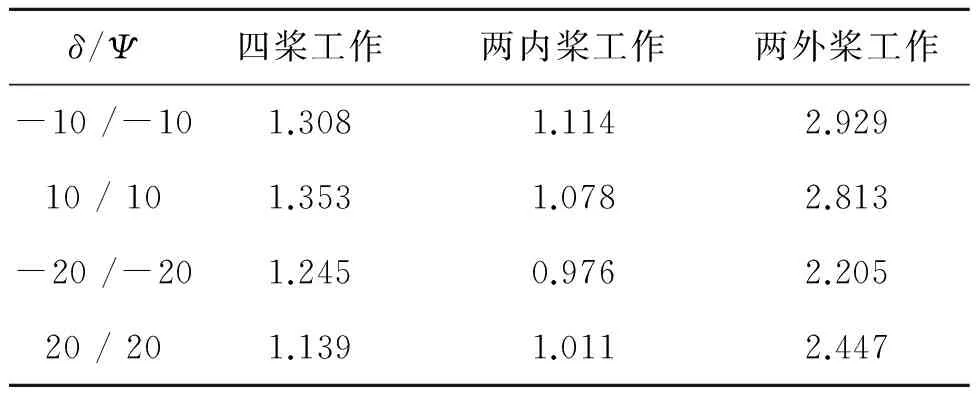
表3 无因次应舵指数随舵角δ的变化
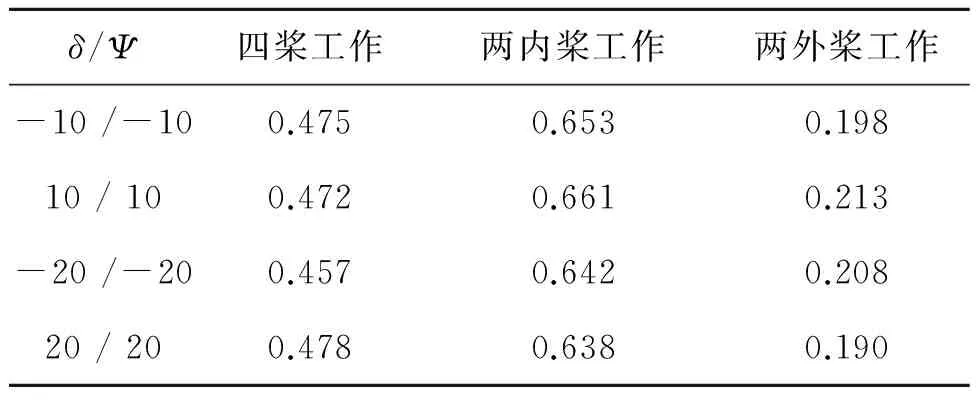
表4 无因次转首指数随舵角δ的变化
3 结论
1)同一航速下,两内桨工作时回转直径最小,四桨工作时次之,两外桨最大;两内桨工作时回转角速度、稳定横倾角及最大横倾角最大,四桨工作时次之,两外桨最小;两内桨工作时回转速降系数最小,两外桨工作时次之,四桨最大。
2)同一舵角下,两内桨工作时回转性指数和转首指数最大,四桨工作时次之,两外桨最小;两内桨工作时应舵指数最小,四桨工作时次之,两外桨最大。
3)针对本文研究的航速,3种不同螺旋桨工作模式下,船模的稳定横倾角均在舵角20°~25°时达到极大值。
本文通过自航模试验对比分析了不同螺旋桨工作状态时船舶的操纵性能,以确保各个状态下的安全航行。下一步将采用计算机数值模拟的方法对各螺旋桨工作状态时船体周围的精细流场进行计算,以分析产生此种现象的内在机理,为今后四桨双舵船的操纵性理论分析和研究奠定基础。
[1] 杨盐生,蒋维清,贾传荧.数据库方法在船舶操纵数学模型参数计算中的应用[C]∥中国造船工程学会船舶力学学术委员会第六届船舶操纵学术研讨会,大连,1992:228-238.
[2] ARTYSZUK J.A look into Motion Equations of the ESSO OSAKA Maneuvering[J].International Shipbuilding Progress,2003,50(4):297-315.
[3] MOREIRA L,SOARES C G.Dynamic Model of Maneuverability using recursive neural networks[J].Ocean Engineering,2003,30(13):1669-1697.
[4] YOSHIMURA Y, MA N.Manoeuvring Prediction of Fishing Vessels[J].MARSIM’03,2003:RC-29.
[5] KEICHI K,SEIJI O.Predictions of Ship’s Hull Hydrodynamic Forces and Maneuvering Motions at slow Speed based on a Component-type Mathematical Model[J].MARSIM’03,2003:RC-4.
[6] 赵 杨.船舶适航性与操纵性自航模系统设计[D].哈尔滨:哈尔滨工程大学,2010.
[7] 李 立.单桨单舵和单桨双舵的自航模操纵性试验对比分析[J].船舶,2004,4(2):53-56.
[8] HASEGAWA K,KANG D,SANO M,et al.A study on improving the course-keeping ability of a pure car carrier in windy conditions[J].Journal of Marine Science and Technology,2006,11:76-87.
[9] 范尚雍,朱 军,程智斌.驱逐舰操纵性预报[J].中国造船,1990(1):1-6.
[10] 莫 建.波浪中船舶六自由度操纵运动数值仿真[D].哈尔滨:哈尔滨工程大学,2009.
[11] 祁宏伟.波浪中船舶六自由度操纵/摇荡耦合运动仿真研究[D].哈尔滨:哈尔滨工程大学,2008.
[12] 刘 杨.船舶操纵运动仿真中的水动力系数敏感性分析[D].哈尔滨:哈尔滨工程大学,2008.
[13] 吴 晗.大型舰船操纵性理论预报及视景仿真[D].哈尔滨:哈尔滨工程大学,2010.
[14] 刘伟明.波浪中船舶六自由度“操纵-摇荡”耦合运动数值仿真[D].哈尔滨:哈尔滨工程大学,2010.
[15] 徐明彩.大型水面舰船操纵性仿真软件开发[D].哈尔滨:哈尔滨工程大学,2011.
[16] 单铁兵.四桨双舵船舶螺旋桨不同工况下水动力性能及船体操纵性研究[D].哈尔滨:哈尔滨工程大学,2008.
Experimental Study on Influence of Propellers' Operating Modes upon Maneuvering Characteristics for a Quadruple-screw Ship
WANG Hui-ting, BI Yi
(Dept. of Naval Architecture Engineering, Naval University of Engineering, Wuhan 430033, China)
There are different operating modes of propeller for the quadruple-screw ship, such as operating conditions with four propellers, two inner propellers and two outer propellers. The turning test and zigzag test of a self-propelled model are carried out in the open still water to investigate its maneuvering characteristics under different operating modes. Experimental results show that the dimensionless turning ability index and the yawing index by two inner propellers is greater than that by four propellers which is greater than that by two outer propellers; the dimensionless steering quality index by two inner propellers is lower than that by four propellers which is lower than that by two outer propellers. Therefore, the turning performance, sailing stability and steering quality by the operating mode of two inner propellers are all superior to the other two modes.
quadruple screw vessel; operating modes of propellers; self-propelled model test; maneuverability
10.3963/j.issn.1671-7953.2015.06.014
2015-07-22
水动力学重点基金 (9140A14030712JB11044)
王慧婷(1990-),女,硕士生。
U661.1
A
1671-7953(2015)06-0060-05
修回日期:2015-08-17
研究方向:舰船流体动力性能
E-mail:whut_wht@163.com
猜你喜欢
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
舰船科学技术(2020年6期)2020-11-27
航空发动机(2020年3期)2020-07-24
舰船电子工程(2020年4期)2020-06-19
中学科技(2017年10期)2017-11-04
儿童故事画报·自然探秘(2017年3期)2017-06-29
中国水运(2015年2期)2015-04-23
语文世界(小学版)(2014年3期)2014-08-02
小学生导刊(中年级)(2007年5期)2007-07-03
