
三轴惯导测试转台寻零方法应用研究
2015-05-06 03:11:38曹院,鲁浩
兵器装备工程学报 2015年8期
曹 院,鲁 浩
(中国空空导弹研究院,河南 洛阳 471009)
【基础理论与应用研究】
三轴惯导测试转台寻零方法应用研究
曹 院,鲁 浩
(中国空空导弹研究院,河南 洛阳 471009)
为了满足在三轴转台上测试捷联式惯导系统导航性能的要求,必须精确确定三轴转台的初始零位;介绍了北向基准的建立方法,详细阐述了三轴转台3个框轴的寻零方法;经惯导系统导航测试实验证明,此方法满足导航测试要求。
三轴转台;寻零;北向基准;经纬仪;数字水平仪
捷联式惯导系统在三轴转台上测试其导航性能时,必须确定其测试初始时刻的姿态信息,即确定三轴转台在初始时刻的位置信息,则必须对转台三个框轴寻零。考虑到捷联式惯导系统的坐标系及其夹具的安装方式,设定此时三轴转台位置为零位,即外框平面镜法线方向指北,内框旋转法线方向垂直指天,内框零位由捷联式惯导系统夹具安装位置确定。
1 北向基准的建立


图1 真北方位角定义
当实验室有北向基准时,采用经纬仪自准直和互瞄传递法即可对三轴转台寻零,当实验室无北向基准时,采用北向基准建立的方法也可对三轴转台寻零。本实验室已建立北向基准,如图2所示,在花岗岩材质的固定台体(其基础与周围地面隔离)的表面上固定安装一立方镜,此立方镜正面法线方向为北向基准,其标定精度(标准偏差)不大于6″。

图2 基准立方镜
建立此北向基准采用高精度陀螺经纬仪Y/TJD-1,其定向精度为5″,且具有自准直功能。实施步骤如下:
1) 天文方位测量。在空旷处选择可相互通视、相距140m的两点,钉入测钉,以测钉中心作为观测标志,测钉之间的连线为天文方位边。采用北极星任意时角法,在方位边两端测站独立对向观测,测定方位边的真北方位角,作为标定陀螺经纬仪常数偏差的已知方位。
2) 陀螺经纬仪常数偏差标校。陀螺经纬仪常数偏差的标校在天文方位边上进行。陀螺经纬仪采用三脚架激光对中,觇牌为光学对点器对中。由于这两种对中方式的对中误差不超过0.5 mm,对于140 m的边长,由对中误差引起的方向误差不超过0.7″,因此此方向误差相对于陀螺经纬仪的定向误差而言可以忽略。
在对立方镜法线方位标定前、后,均需独立标校陀螺经纬仪常数偏差一次,且两次标校间隔时间不超过3 d,并取两次独立标校的平均值作为陀螺经纬仪常数偏差。
设天文方位边的已知方位为An,陀螺经纬仪测量的方位为Tn,则陀螺经纬仪的常数偏差为
γ=An-Tn
3) 立方镜法线方位标定。陀螺经纬仪对立方镜进行自准直,其方向的反向为立方镜的法线方向。陀螺经纬仪观测6测回,取平均值作为方位测量结果。

2.三轴转台寻零
2.1 外框寻零
以实验室北向基准为方位基准,采用经纬仪自准直和互瞄传递方法对外框寻零,其示意图如图3所示。选用的两台经纬仪型号均为TM5100A,其测角精度为0.5″,且具有自准直功能。
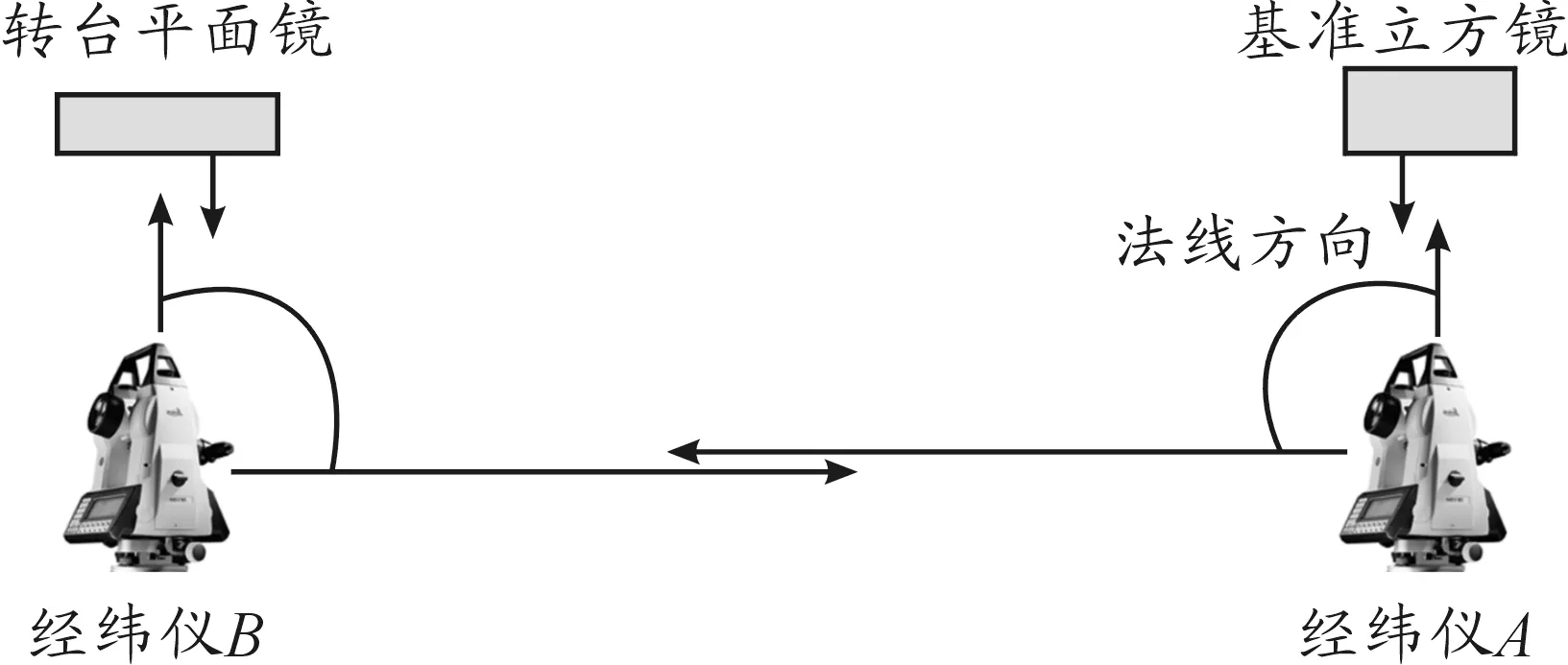
图3 经纬仪自准直和互瞄传递方法示意图
实施步骤:经纬仪A对基准立方镜进行自准直,经纬仪B对外框平面镜进行自准直,分别记录两台经纬仪角度的读数;经纬仪A和经纬仪B互相瞄准,进行准直,分别记录两台经纬仪角度的读数。
设基准立方镜法线方位为An,两台经纬仪测量的夹角分别为α和β,则外框平面镜的法线方位Bn为
Bn=An-α-β+180°
重复上述实施步骤,独立测量4测回,并取4测回均值作为测量结果。最后设定外框平面镜法线方向指向北向时,外框位置为零位。
2.2 中框寻零
考虑到内框台面的表面平面度较高,故采用数字水平仪对中框寻零。选用的数字水平仪型号为前哨WL11型,选择测量灵敏度档0.001 mm/m。
实施步骤:将数字水平仪放在实验室静止2 h,将三轴转台外框旋转到零位,中框旋转到内框旋转法线方向垂直指天的位置;在内框台面外周,南、北直线上选取两处作为测量点;用数字水平仪测量多次,并调整中框轴的旋转角度,直到内框台面水平,记录此刻中框轴旋转的角度;重复测量4次,取平均值,即完成中框的寻零。
2.3 内框寻零
内框的寻零有两种方法:一是将三轴转台外、中框旋转到零位,用加工精度很高的立方镜放置在内框台面上,采用外框寻零方法对内框寻零;二是做一件如图4所示的工装,A、B面垂直,且A面内表面和B面外表面平面度较高,固定工装B面在内框台面,将转台中框轴旋转90°,用数字水平仪在工装A面内表面上测量,调整内框轴的旋转角度,直到A面水平即可,记录此刻内框轴旋转的角度,重复测量4次,取平均值,即完成内框的寻零。

图4 工装示意图
3 测量结果
1) 北向基准方位测量结果。陀螺经纬仪对立方镜进行自准直观测6测回,测量结果如表1所示。对6测回测量结果取平均值,即基准立方镜的法线方向为243°22′09″。
2) 外框寻零测量结果。采用两台经纬仪自准直和互瞄传递方法对外框寻零,测量结果如表2所示。
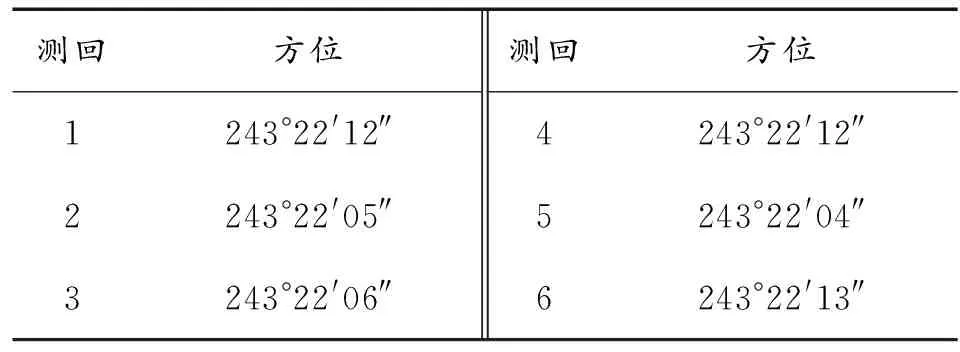
表1 北向基准方位测量结果

表2 外框寻零测量结果
对4测回测量结果取平均值,即外框平面镜的法线方向为246°45′36″。
3) 中框寻零测量结果。重复4次测量,中框轴旋转角度结果如表3所示。对4次测量结果取平均值,即中框零位为173°03′29″。

表3 中框测量结果
4) 内框寻零测量结果。重复4次测量,内框轴旋转角度结果如表4所示。对4次测量结果取平均值,即中框零位为35°42′22″。
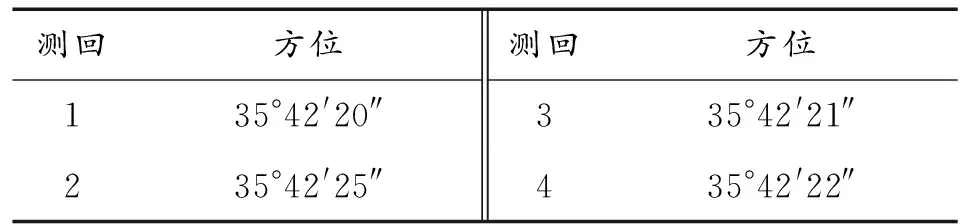
表4 内框测量结果
4 结论
捷联式惯导系统的导航性能测试需要精确确定三轴转台的零位。本文详细介绍了北向基准的建立方法,并以此北向基准对三轴转台外框进行了寻零;同时按照实际情况出发,采用高精度数字水平仪对中框、内框进行了寻零。经多次捷联式惯导系统导航测试证明,此方法满足捷联式惯导系统导航性能测试要求,具有一定的工程应用价值。
[1] 张天光,译.捷联惯性导航技术[M].2版.北京:国防工业出版社,2010:299-309.
[2] 梁晓庚.空空导弹制导控制系统设计[M].北京:国防工业出版社,2006:143-172.
[3] 郑志伟.空空导弹系统概论[M].北京:兵器工业出版社,1997(12):104-124.
[4] 于永胜,朱宝.陀螺经纬仪在北向基准检测中的应用研究[J].宇航计测技术,2011(4):1-6.
[5] 解放军信息工程大学地理空间信息学院.北向基准测定及测试设备方位校准成果报告[R].洛阳,2012.
[6] 盖鹏飞.经纬仪/全站仪自准直方法[J].测绘科学技术学报,2010(6):196-199.
[7] 李广云,郭福生.经纬仪互瞄法在短边方位传递中的应用[J].解放军测绘学院学报,1997(12):256-260.
[8] 青岛前哨精密仪器有限公司.DL系列数字水平仪使用说明书[EB/OL].[2014-12-17].http://qiaoshaopic.com.
(责任编辑 杨继森)
Applied Research of Looking Zero for Three Axis Inertial Navigation Test Turntable
CAO Yuan, LU Hao
(China Airborne Missile Academy, Luoyang 471009, China)
In order to meet the requirements of the test of strap-down inertial navigation system performance in the three-axis turntable, the initial zero position of the three-axis turntable must be determined accurately. This paper introduced the method of establishing the north reference, and elaborated the method of looking zero for the three-axis turntable. The navigation test of inertial navigation system proved that these methods satisfy the navigation test requirements.
three-axis turntable; looking zero; north reference; theodolite; digital level meter
2015-01-15
曹院(1988—),男,助理工程师,主要从事惯性技术研究。
10.11809/scbgxb2015.08.041
曹院,鲁浩.三轴惯导测试转台寻零方法应用研究[J].四川兵工学报,2015(8):166-168.
format:CAO Yuan,LU Hao.Applied Research of Looking Zero for Three Axis Inertial Navigation Test Turntable[J].Journal of Sichuan Ordnance,2015(8):166-168.
V448
A
1006-0707(2015)08-0166-03
猜你喜欢
装备制造技术(2022年5期)2022-09-06 03:42:46
宇航计测技术(2022年2期)2022-06-01 09:34:44
现代机械(2021年3期)2021-07-12 00:47:42
客车技术与研究(2019年5期)2019-10-24 02:22:44
测控技术(2018年3期)2018-11-25 09:45:50
数学教学通讯·高中版(2018年11期)2018-01-15 10:23:12
百科探秘·航空航天(2016年9期)2016-12-01 03:04:22
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
楚雄师范学院学报(2015年9期)2015-06-19 06:06:18
电子设计工程(2015年3期)2015-02-27 12:03:53
