蠕动掘进潜入式行星探测装置方案设计研究
2015-05-05 01:53:35节德刚张伟伟姜生元陈化智沈毅全齐全侯绪研邓宗全
深空探测学报 2015年1期
节德刚,张伟伟,姜生元,陈化智,沈毅,全齐全,侯绪研,邓宗全
(1.探月与航天工程中心,北京 100037;2.哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150080)
蠕动掘进潜入式行星探测装置方案设计研究
节德刚1,张伟伟2,姜生元2,陈化智2,沈毅2,全齐全2,侯绪研2,邓宗全2
(1.探月与航天工程中心,北京 100037;2.哈尔滨工业大学 机器人技术与系统国家重点实验室,哈尔滨 150080)
针对在地外星体较大深度处长期地实施地质科学探测这一新的研究难题,运用无人自动潜入式探测原理,提出了蠕动掘进潜入式行星探测装置的设计方案,并重点对探测装置的机构设计开展了研究;成功研制出蠕动掘进潜入式探测装置试验样机及其性能测试平台,为蠕动掘进潜入式行星探测装置方案的可行性验证以及性能测试奠定技术基础。研制的蠕动掘进潜入式行星探测装置对我国未来的行星探测任务具有借鉴意义。
行星探测;潜入式探测;蠕动掘进;机构设计
0 引 言
行星探测作为人类了解太空世界最直接的途径,是世界上各航天大国开展深空探测的主要目标。对地外天体星壤化学成分、物理及力学特性,以及星壤剖面温度场等方面的科学探测也越来越引起各国的关注。美国、欧空局、日本等国家及组织针对月球、火星等星体开展了各类探测活动,如美国Apollo、前苏联Luna系列探测器都对月球进行了采样探测[1]。美国、欧空局针对火星探测也开发了探测器,并有成功着陆及移动探测的先例[2]。
在已经成功实施的针对不同地外天体的无人探测活动中,人类对地外天体地质的研究与了解主要通过采样探测、就位探测等方式。采样探测通常利用钻进采样、表取采样两种方式获得星体表层及次表层星壤样品,并借助返回器将样品带回地面进行研究[3]。钻进采样的探测装置由钻具及驱动部件组成,驱动部件安装在着陆器上,钻具末端与驱动部件连接。钻具前端部分在驱动部件的驱动下,破碎并转移星壤而进入星体表层以下实施采样探测任务。表取采样装置由机械臂和采样器组成,机械臂安装在着陆器上,采样器安装在机械臂末端。采样过程中,机械臂运动并操作采样器对星球表面的星壤、石块进行采样。与采样探测方式不同,就位探测利用探测器自身所携带的科学探测仪器直接对探测目标实施探测,并将探测数据传送到地球。分析上述三种探测方式,当采用钻进取样方式实施探测时,钻具需要克服整个深度上星壤的阻力。随着钻进深度的增大,钻进阻力显著增大,驱动部件的驱动功率需求大,因而驱动部件的体积、质量势必会很大。而在实际行星探测活动中,探测装置的质量会受到火箭运载能力的限制,探测装置的工作周期会受到能源供应的约束,探测装置的结构会受到着陆器构型的制约。因此,钻进采样探测的探测深度浅、探测时间短,样品的科学价值有限。而表取采样探测只能获取星球表层的样品,样品的科学价值更加有限。就位探测所采取的具体实施手段是将科学探测仪器埋入星壤实施探测任务,而在已有的行星探测任务中,探测仪器均未被埋入到星体地质较深的部位[4],探测数据的丰富性与精确性有限。因此,在火箭运载能力不够、能源供应有限的现实情况下,在星体较大深度处长期地实施较为丰富的科学探测是行星探测领域新的研究难题。
为了攻克这一难题,领域内学者提出了无人自动潜入式探测的理念[5]。潜入式探测的核心是潜入式探测装置。潜入式探测装置由辅助设备和潜入器两部分组成。工作过程中,辅助设备安装在星体表面,为潜入器提供能源、支撑等保障。潜入器则可潜入到地质层中,并能通过内置的探测传感器对地质构成等目标进行探测。潜入式探测装置功耗小,在能源供应一定的情况下,可以工作更长时间,生命周期长。国内外对于星球自动潜入式探测装置的研究时间较长。以欧洲为代表的研究单位重点研究了冲击贯入式潜入器,开展了大量试验研究,技术较为成熟[6-7]。此类潜入器依靠冲击挤压星壤而形成下潜空间,下潜能力有限。因此,日本学者提出在潜入过程中对切屑进行转运和排除,设计了多种具有螺旋输送功能的自动潜入器并开展了试验研究工作[8-9]。但此类型的潜入器试验潜入深度没超过600 mm,因为下潜压力不足导致了下潜深度较浅。为了克服潜入器下潜压力不足的问题,英国和日本学者分别基于仿生原理提出了两款蠕动掘进式潜入器[10-11]。潜入式探测装置质量和体积小,航天器需要搭载的有效载荷小,对火箭负载能力要求低。因此,采用无人自动潜入式探测方案,一方面可以降低火箭发射成本;另一方面,在火箭发发射能力一定的前提下,潜入式探测装置可以被送达距地球更远星球,获得更为丰富的深空探测数据,能大大提高人类对宇宙发展的认知水平。综上所述,对于未来深空地外天体地质构成的探测研究,潜入式探测是一种有效手段和方式。本文基于无人自动潜入式探测原理,对蠕动掘进潜入式行星探测装置方案与机构设计开展研究。
1 潜入式探测装置方案设计
1.1 潜入式探测原理分析与比较
潜入式探测分潜入和探测两个环节,潜入器的作用就是对星体实施潜入。潜入的本质是在对象中形成下潜空间而下潜,根据形成下潜空间方式的不同,潜入原理可以分为两种类型:1)强制扩孔式潜入原理;2)颗粒转移式潜入原理。两种潜入原理示意图如图1所示。

图1 潜入式探测潜入原理示意图Fig.1 Diagram of the boring principle
在强制扩孔式潜入原理中,轴向冲击力Fa作用在潜入器上,Fa为潜入器提供轴向的瞬时冲量I。在I作用下,潜入器克服周围星壤阻力而产生轴向潜入运动,运动位移为ΔH。冲击力Fa周期作用,潜入器实现对探测对象的潜入。在潜入器强制扩孔而潜入的过程中,孔内原生星壤向周围挤压,周围星壤在挤压作用下密实度增大而形成一层挤密星壤层。挤密星壤层的密实度越大,孔隙率越小,可压缩性也就越差,因而潜入器的下潜阻力就越大。因此,随着潜入深度的增大,星壤的密实度越大,潜入器越难下潜。在颗粒转移式潜入原理中,在轴向压力Fb、周向力矩Mb的作用下,潜入器对前端星壤进行破碎,转移。破碎作用使原生星壤变成较为松散的次生星壤,而次生星壤经过转移堆积在潜入器后端。随着潜入深度的增大,潜入器后端堆积的次生星壤增多。当堆积次生星壤在潜入器后端形成的压力超过潜入器承载能力时,潜入器失效而停止下潜。
由上述对潜入式探测两种潜入原理的分析可知,颗粒转移式潜入原理较强制扩孔式潜入原理在极限潜入深度上不受星壤密实度的限制。尤其对于密实度较大的星壤,颗粒转移式潜入原理的优势明显。因此,未来的行星探测潜入器可利用颗粒转移式潜入原理进行设计,但同时需要解决潜入器后端星壤堆积的问题。
1.2 蠕动掘进潜入式探测装置方案设计
利用颗粒转移式潜入原理,设计蠕动掘进式潜入探测装置方案,如图2所示。图2(a)为蠕动掘进式潜入式探测装置组成图。探测装置由蠕动掘进式潜入器、排土单元、辅助支撑单元、供电单元、控制单元等五个部分组成。蠕动掘进式潜入器的作用是实现对星体的潜入,关于蠕动掘进式潜入器的设计在第3节有详细的介绍。工作过程中,蠕动掘进式潜入器将其下方的原生星壤破碎成较为松散的次生星壤,并将其运移到后端。排土单元的作用是将蠕动掘进式潜入器后端堆积的次生星壤转移到星体表面,消除星壤堆积对蠕动掘进式潜入器的负载,排土单元的设计有效的解决了颗粒转移式潜入原理中潜入器后端星壤堆积的问题。供电单元利用太阳能电池板储存能量,为蠕动掘进式潜入器运动、科学探测仪器提供能源保障。控制单元一方面对蠕动掘进式潜入器运动进行控制,另一方面还承担采集并储存探测数据的任务。

图2 蠕动掘进潜入式探测装置方案图Fig.2 Scheme of the creepy-boring type subsurface investigation device
蠕动掘进式潜入器是潜入式探测装置的核心,也是探测装置的研究难点。本文重点针对蠕动掘进式潜入器的机构设计开展研究。考虑到提高潜入器潜入能力以及线缆扭转等设计问题,提出蠕动掘进潜入式潜入器原理方案,如图2(b)所示。蠕动掘进式潜入器由主掘进单元、副掘进单元、蠕动进给单元、主定姿单元、副定姿单元等五个单元组成,主、副掘进单元之间的区域为缓存区。主掘进单元上安装有主排土螺旋和掘进头组合机具,具备破碎、定向排屑功能;副掘进单元上安装有副排土螺旋机具,具备定向排屑功能;蠕动进给单元能分别对主、副掘进单元传递扭矩和推拉力;主、副定姿单元能够分别使主、副掘进单元相对于星壤固定。主、副掘进单元分别通过主、副定姿单元的作用,可分别相对于对方转动,实现对星壤的破碎、定向接力式排屑功能。蠕动掘进式潜入器下潜流程如图3所示。

图3 蠕动掘进式潜入器潜入动作流程图Fig.3 Motion sequences of creepy-boring type robot
假定图3(a)为蠕动掘进式潜入器实施潜入动作的初始状态。蠕动掘进式潜入器具体下潜过程如下:
(a)蠕动掘进式潜入器初始状态。
(b)副定姿单元工作,副掘进单元与星壤锁定。
(c)主掘进单元作回转、进给运动。运动过程中,掘进头对正下方的原生星壤进行破碎,将原生星壤转换为次生星壤。同时,排土螺旋对次生星壤进行输送,将其运移到缓存区。
(d)主掘进单元下潜深度ΔH后,主、副定姿单元与星壤的约束关系转换。主掘进单元与星壤锁定,副掘进单元如星壤解除锁定关系。
(e)副掘进单元实施回转、进给运动。在运动过程中,副掘进单元将缓存区的星壤运移到蠕动掘进式潜入器后端。下潜深度达到ΔH时,潜入器完成一个蠕动下潜过程。重复过程(a)~(e),蠕动掘进式潜入器实现蠕动下潜。
2 蠕动掘进式潜入器设计及样机研制
2.1 蠕动掘进式潜入器本体方案设计
根据工作过程中的动作设置,提出蠕动掘进式潜入器本体详细设计方案如图4所示。图中粗实线代表的是蠕动掘进式潜入器的机架。机架分成主、副机架两个部分。主机架为主掘进单元、主定姿单元提供安装基体;副机架为副掘进单元、副定姿单元、蠕动进给单元提供安装基体。主、副机架之间通过蠕动进给单元连接,在蠕动进给单元的作用下,主、副机架之间可实现相对的伸展或收缩运动,进而实现了主、副掘进单元的蠕动进给运动。
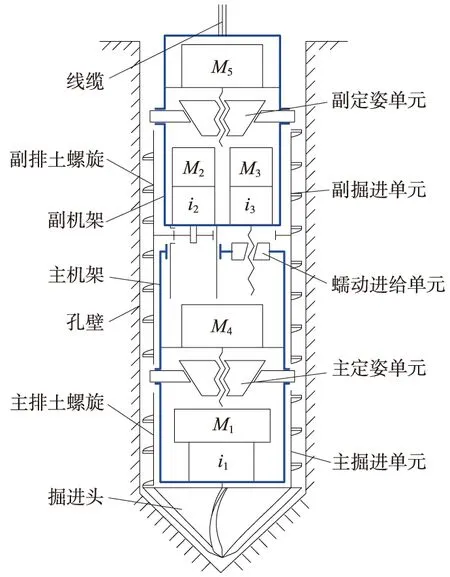
图4 蠕动掘进式潜入器本体设计方案Fig.4 Scheme of creepy-boring type robot
主掘进单元由驱动组件M1直接驱动,实现掘进头与主排土螺旋的组合体绕自身轴线的回转运动。副掘进单元由M2驱动,M2将动力经由内齿轮传递到副排土螺旋上,实现副排土螺旋绕自身轴线的回转运动。蠕动进给单元由M3驱动,采用丝杠丝母传动方式,实现主、副掘进单元轴向的相对运动。主、副定姿单元分别由M4、M5驱动,通过斜面机构实现定姿支持腿的伸缩运动,进而实现与星壤的锁定与解除锁定的约束关系。
2.2 蠕动掘进式潜入器样机研制
根据方案设计,开展蠕动掘进式潜入器本体结构设计与样机研制工作。图5(a)为蠕动掘进式潜入器三维结构设计图,图5(b)为研制成功的蠕动掘进式潜入器样机。样机的质量为4.1 kg,外形尺寸为φ80 mm×560 mm。蠕动掘进式潜入器各单元具体设计参数如表1所示。

图5 蠕动掘进式潜入器设计Fig.5 Design of the creepy-boring type robot

单元名称参数主掘进单元额定转速:9369r/min额定扭矩:3745N·m额定功率:50W副掘进单元额定转速:1068r/min额定扭矩:278N·m额定功率:40W主、副定姿单元定位力:1873~3354N蠕动进给单元额定进给速度:06mm/s进给行程:60mm额定推力:46698N
注:蠕动掘进式潜入器本体整机质量4.1 kg;整体外形尺寸φ80 mm×560 mm。
3 蠕动掘进式潜入器潜入特性测试试验系统
为了验证蠕动掘进潜入式探测方案的可行性和测试蠕动掘进式潜入器的潜入特性,开发了如图6所示的试验平台。试验平台由机械系统、控制系统组成。机械系统包括辅助设备和蠕动掘进式潜入器本体;控制系统包括上/下位机、控制箱。蠕动掘进式潜入器潜入特性测试试验平台参数如表2所示。

图6 蠕动掘进式潜入器潜入特性测试平台Fig.6 Boring characteristic test platform of creepy-boring type robot

项目参数外形尺寸300mm×320mm×2700mm潜入器潜入对象模拟星壤试验设计潜入深度2m(可扩展)控制系统控制量各电机转速、力矩控制系统监测量潜入负载、深度数据采样频率200Hz
注:试验平台所允许的设计潜入深度可以通过增加星壤桶个数叠加的方式扩展。

图7 机械系统组成Fig.7 Components of mechanical system
机械系统组成如图7所示,辅助设备由梳线槽、位移传感器、辅助导套、辅助支架、模拟星壤桶组成。位移传感器采用的是拉线编码器,拉线编码器出线端与蠕动掘进式潜入器本体相连,记录潜入过程位移变化。辅助导套在蠕动掘进式潜入器潜入初始阶段为定姿单元提供刚性支撑,当蠕动掘进式潜入器完全潜入到模拟星壤表层下时,蠕动掘进式潜入器潜入形成的孔壁为定姿单元提供支撑。制备模拟星壤时,为了保证模拟星壤在星壤桶内沿高度方向上特性参数的一致性,使用单段星壤桶进行制备,最后将多个装有模拟星壤的星壤桶叠加。
本文中的控制系统是基于xPC-Target架构搭建的,控制系统由两台PC机组成,一台为调试Simulink模型的宿主机(上位机),另一台为具有实时操作系统的目标机(下位机),可以实时运行由宿主机通过TCP/IP传送过来的编译后的Simulink控制模型,再与PCI-6229板卡进行通信,对蠕动掘进式潜入器进行控制。此外,控制系统还能实时采集各驱动电机回转转速、负载力矩,进而实时监测蠕动掘进式潜入器各单元运行情况;同时控制系统通过采集位移传感器的数据获得蠕动掘进式潜入器实时潜入深度。图8为控制系统原理图。

图8 控制系统原理图Fig.8 Diagram of the control system principle
4 蠕动掘进潜入式探测应用前景展望
与传统的探测装置相比,潜入式探测装置的应用前景更加广泛。因其自身体积、质量小,功耗消耗低等优势,除了月球、火星外,潜入式探测装置还可对更远的星体如木卫二、彗星等进行探测;因其可以携带探测仪器实施探测,利用潜入式探测装置可以开展星壤机械力学参数测量、星壤剖面温度场测量、星球地质震动监测、星球磁场强度测量、星壤化学成分检测与分析等探测活动。
5 结 论
与传统的采样探测、就位探测等探测方式相比,潜入式探测具有探测周期长、探测深度大、探测目标丰富等优势,其应用前景更加广泛。运用潜入式探测原理,本文成功研制了蠕动掘进潜入式探测装置及其特性测试试验系统,取得了阶段性成果,为潜入式探测装置方案可行性验证与性能测试奠定了基础。该研究对我国未来的行星探测任务具有借鉴意义。
[1] 鄢泰宁,冉恒谦,段新胜.宇宙探索与钻探技术[J].探矿工程:岩土钻掘工程, 2010,37(1):3-7. [Yan T N, Ran H Q, Duan X S. Universe exploration and drilling technique[J]. Exploration Engineering: Rock & Soil Drilling and Tunneling, 2010,37(1):3-7.]
[2] 李爽,彭玉明,陆宇平.火星EDL导航、制导与控制技术综述与展望[J].宇航学报,2010,31(3):621-627. [Li S, Peng Y M, Lu Y P. Review and prospect of guidance and control for Mars atmospheric entry[J]. Progress in Aerospace Sciences, 2010,31(3):621-627.]
[3] 彭兢,黄昊,向开恒,等.月球无人采样返回任务概念设想[J].航天器工程,2010,19(005):99-104. [Peng J, Huang H, Xiang K H, et al. Conception design of a lunar robotic sampling and return mission[J]. Spacecraft Engineering, 2010,19(005):99-104.]
[4] Heiken G H, Vaniman D T, French B M. Lunar sourcebook-A user’s guide to the moon [M]. Cambridge, England: Cambridge University Press, 1991.
[5] Gromov V V, Misckevich A V, Yudkin E N, et al. The mobile penetrometer, a mole for subsurface soil investigation[C]∥The 7th European Space Mechanisms and Tribology Symposium. Noordwijk, the Netherlands:[s.n.], 1997.
[6] Richter L, Kochan H, Gromov V V, et al. The development of the “Mole with sampling mechanism” subsurface sampler[C]∥Proceedings, 6th ESA Workshop on Advanced Space Technologies for Robotics and Automation (ASTRA 2000). Noordwijk, The Netherlands:[s.n.], 2000.
[7] Richter L, Coste P, Gromov V, et al. Development and testing of subsurface sampling devices for the Beagle 2 lander[J]. Planetary and Space Science, 2002,50(9):903-913.
[8] Nagaoka K, Kubota T, Otsuki M, et al. Experimental study on autonomous burrowing screw robot for subsurface exploration on the moon[C]∥2008 IEEE/RSJ International Conference on Intelligent Robots and Systems. Nice, France:[s.n.], 2008.
[9] Nagaoka K. Study on soil-screw interaction of exploration robot for surface and subsurface locomotion in soft terrain[D]. Kanagawa: The Graduate University for Advanced Studies, 2011.
[10] Gouache T P, Gao Y, Coste P, et al. First experimental investigation of dual-reciprocating drilling in planetary regoliths: Proposition of penetration mechanics [J]. Planetary and Space Science, 2011,59(13):1529-1541.
[11] Omori H, Murakami T, Nagai H, et al. Development of a novel bio-inspired planetary subsurface explorer: Initial experimental study by prototype excavator with propulsion and excavation units[J]. Mechatronics, IEEE/ASME Transactions on, 2013,18(2):459-470. 作者简介: 节德刚(1978—),男,工学博士,研究员,主要研究方向:航天工程总体及机电一体化技术。 通信地址:北京市西城区车公庄大街12号1036室(100037) 电话:(010)88306165 E-mail:joshjie@126.com
[责任编辑:宋宏]
Research on Design of Creepy-Boring Type Subsurface Investigation Device for Planetary Exploration
JIE Degang1,ZHANG Weiwei2, JIANG Shengyuan2, CHEN Huazhi2, SHEN Yi2, QUAN Qiquan2, HOU Xuyan2, DENG Zongquan2
(1.Center of Lunar Exploration and Space Program, Beijing 100037, China; 2.State Key Laboratory of Robotics and System, Harbin Institute of Technology, Harbin 150080, China)
This paper investigates the relevant information of planetary exploration, and analysis to obtain that the long-term and wealth scientific investigation in the greater depth will be a new research problem in the field of planetary exploration. In order to solve this problem, this paper puts forward a creepy-boring type subsurface investigation device for planetary exploration, and mainly focus on the study of its mechanism design. Finally, this paper successfully developed the creepy-boring type robot and its test platform for feasibility verification of the scheme and performance test for the prototype. The device has significance reference for China future planetary exploration mission.
planetary exploration; subsurface investigation; creepy-boring; mechanism design
2014-12-01
2015-02-10
国家国际科技合作专项项目(2014DFR50250);载人航天领域预先研究项目(050102)
V11
A
2095-7777(2015)01-0088-06
10.15982/j.issn.2095-7777.2015.01.013
猜你喜欢
数学物理学报(2021年5期)2021-11-19 07:00:58
保健医苑(2020年1期)2020-07-27 01:58:18
百科探秘·航空航天(2020年6期)2020-07-09 03:31:06
数学物理学报(2019年5期)2019-11-29 07:46:24
小学科学(2019年9期)2019-10-18 09:33:23
中学生数理化·八年级物理人教版(2019年5期)2019-06-25 00:58:58
数学物理学报(2019年1期)2019-03-21 05:26:34
读者(2018年20期)2018-09-27 02:44:48
中学生数理化(高中版.高二数学)(2017年1期)2017-04-16 05:33:50
高师理科学刊(2016年8期)2016-06-15 20:27:49