
大型深水半潜式起重铺管船船型优化与分析*
2015-04-29 05:08杨辉陈峰
中国海上油气 2015年5期
杨辉陈峰
(海洋石油工程股份有限公司 天津 300451)
杨辉,陈峰.大型深水半潜式起重铺管船船型优化与分析[J].中国海上油气,2015,27(5):109-115.
起重铺管船作为海上油气田开发中不可或缺的重要装备,不仅适用于海上平台设施的吊装与拆除以及导管架的辅助下水与就位,还可用于水下安装和海底油气管道的铺设、维修等作业。随着我国海上油气田开发从浅水走向深水,大型深水起重铺管船日益成为研究的重点[1]。
现有深水起重铺管船采用的船型有常规单体船及半潜式船,在铺管方式上又主要区分为S型铺管和J型铺管。由于半潜式船型在耐波性及可达到的总起重能力等方面较常规单体船有明显的优势,同时J型铺管方式与S型铺管方式相比,在动力定位需求及管道残余应力等方面较S型铺管方式有明显优势,因此深水环境恶劣海域的起重铺管作业越来越趋向于采用半潜式J型铺管船,而立柱数量与立柱尺寸的选择以及总体布置设计是此类船型设计的要点[2]。本文针对某概念设计中的“十立柱”半潜式J型铺管起重船,从装载与稳性、耐波性、空船质量与结构强度等方面开展了立柱尺寸优化设计工作,得到了优选的“八立柱”船型方案,并对生存吃水与总体布置提出了进一步的优化建议。
1 船型方案的提出与优化
1.1 “十立柱”船型方案
某深水起重铺管船概念设计中设计成十立柱、无横撑的半潜式船型,如图1所示,其主船体由左右2个流线型的下浮体、带圆角的矩形立柱和上平台构成。船首左右立柱与下浮体型线光滑过渡,以减轻首部上浪抨击与航行阻力;下浮体尾部、中部和首部设置若干伸缩式全回转推进器,首部设隧道式侧向推进器,以满足机动与定位需求。上甲板尾部左右各设1台最大起重能力为8 000 t的全回转起重机;铺管作业线设于主甲板中心处,自船尾向船首作业流程布置,首端设J型铺管塔架;生活楼布置在船首铺管作业线两侧,定员750人。该船型长225 m、型宽90 m、型深47 m、下浮体型深15 m、型宽30 m,上平台型深12.5 m,设计航行吃水12 m,作业吃水27 m,生存吃水16 m。
该船由于船长相对较长,概念设计中采用10个立柱,通过不同立柱取不同的水线面积和调整立柱之间的间距,使起重作业时的浮心纵向位置尽量后移,这对于大型起重船确保作业时良好的浮态和稳性是较为重要的,也是与半潜钻井平台静水力性能方面的根本区别所在,后者一般井架设在中间,不存在调整浮心纵向位置以适应重心偏移的问题。
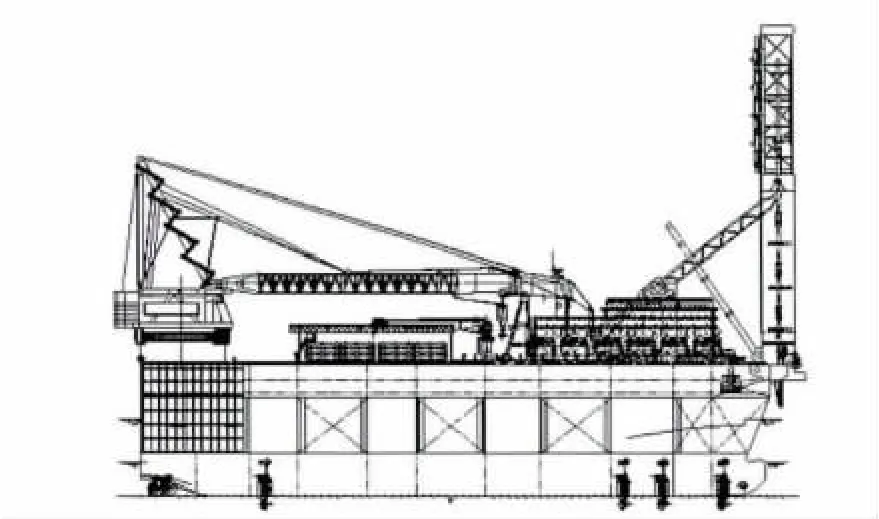
图1 大型深水半潜式起重铺管船概念设计“十立柱”船型侧视图Fig.1 Side view of conceptual design hull form of large deep water sem i-submersible heavy lifting pipelaying vesselw ith 10 columns
1.2 船型方案优化
研究表明,适当减少立柱数量及水线面积有利于船型简化及建造、降低空船质量、改善耐波性能[3]、综合提高经济性等,为此提出与“八立柱”船型进行对比研究,择优选择船型方案。
自船首向船尾“十立柱”船型方案中的立柱尺寸(长×宽×高)如下:首立柱1为34.6 m×30.0 m×19.5 m;中间立柱2为25.2 m×24.1 m×19.5 m;中间立柱3为25.2 m×24.1 m×19.5 m;中间立柱4为25.2 m×30.0 m×19.5 m;尾立柱5为39.2 m×30.0 m×19.5 m。经分析发现,“十立柱”船型方案中的中间立柱对纵稳性帮助不大,所以基于各工况下的吃水保持不变,首先从装载与稳性角度出发,将该船型方案中间的3个立柱优化调整为2个,立柱尺寸调整为32.2 m×26.0 m×19.5 m,这样水线面积较“十立柱”船型方案减小了约590 m2,质量减小了约2 500 t。“八立柱”船型立柱布置简图如图2所示。

图2 大型深水半潜式起重铺管船优选的“八立柱”船型方案Fig.2 Optim ized design hull form of large deep water sem i-submersible heavy lifting pipelaying vessel w ith 8 colum ns scheme
另外,“十立柱”船型采用了无横撑的结构设计,同时采用了上端内侧向船中倾斜的加强型立柱结构以抵抗下浮体间的分离载荷,如图3所示。采用这种无横撑的结构设计有助于减少应力集中点,并降低底部横撑因波浪砰击破坏的风险,但从载荷传递有效性角度来讲,建议采取设置横撑与直壁立柱的设计,在减化立柱设计的同时形成封闭的载荷传递框架结构,从而优化全船结构设计,这将进一步降低船体质量与重心高度。同时,新增的横撑结构亦可用于底部压载管线的布置,这对于需要左右相互调拨的压载系统设计而言具有明显的优势,可避免因吸头高度限制而使用大功率的压载泵,从而可优化全船压载及管线设计,经济性更佳。为避免横撑结构在航行工况下对阻力造成的不利影响以及波浪的过分砰击,建议横撑高度设置在下浮箱顶面以上的立柱底部,按照规范要求进行结构强度、疲劳及冗余设计。

图3 大型深水半潜式起重铺管船概念设计“十立柱”船型典型横截面示意图Fig.3 Typical transverse section of conceptual design hull form of large deep water sem i-submersible heavy lifting pipelaying w ith 10 columns
1.3 主甲板总体布置优化
在甲板总体布置方面,原设计中J型铺管塔位于起重铺管船的船首,其质量可以部分平衡船尾起重机质量,有利于浮态平衡。但是,由于塔架没有设在船尾主起重机的作业半径内,将无法依靠自身设备对塔架进行拆装,在航行、起重及生存等非铺管工况下,其高耸的塔架对稳性及结构本身的安全不利;同时,带塔架航行,对航行视野也会产生一定的影响而需要设置额外的瞭望室。另外,位于船首的生活楼被位于船中的铺管作业线分隔成左右2个部分,这也将给人员的工作、生活起居及逃生带来不利的影响。综合现有典型起重铺管船的布置形式与特点[4],建议将铺管作业线倒置,在纵向尾部立柱间、主起重机的作业半径内的船中区域开月池布置J型铺管塔,生活楼整体横向布置于船头,如图4所示。一方面,该布置形式可方便地利用自身吊机对塔架进行安装与拆除,从而实现在较短的时间间隔内进行作业功能的转换,同时避免了塔架置于船尾带来尾部质量过分集中的不利影响,有效提高了作业效率与安全性能;另一方面,所设置的月池还可用于水下机器人、管线终端管汇等设施的下放,进一步丰富起重铺管船的功能。此外,整体横向布置在船首的生活楼,更利于人员集中与逃生,同时生活区与作业区得到了有效分隔,也避免了航行视野受到J型铺管塔的不利影响。
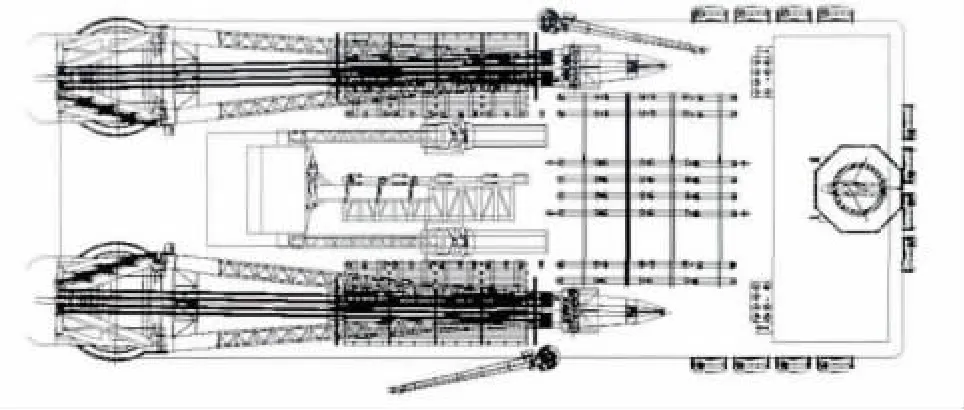
图4 大型深水半潜式起重铺管船主甲板总体布置优化图Fig.4 Main deck optim ized arrangem ent of large deep water sem i-submersible heavy lifting pipelaying vessel
2 优选的“八立柱”船型稳性校核
采用NAPA软件对优选的“八立柱”船型的典型工况进行了完整稳性校核,包括航行工况、铺管和起重作业工况、生存工况,其中起重作业工况又区分为横吊单机起重8 000 t及纵吊双机起重16 000 t等工况。参照美国船级社ABS及中国船级社CCS关于柱稳式平台的相关规范[5-6],采用如下完整稳性衡准:
1)对于复原力矩(GZ)曲线,从正浮至与风倾力矩曲线的第二交点或进水角(取较小者)的面积至少应比至同一限定角处风倾力矩曲线下面积大30%。其中,航行工况、铺管和起重作业工况风速按36.0 m/s计算;生存工况风速按51.5 m/s计算。
2)经自由液面修正后的初稳性高度(GM)应不小于0.15 m。
3)对于复原力矩曲线,从正浮至第二交点的所有角度范围内均应为正值。
另外,由于该船起重载荷较大,使得起重工况下整船重心明显增高,需要大量的压载水进行反向压载,因此起重工况下的失荷稳性是需要重点关注的问题。对于起重工况,还考虑了CCS、ABS关于起重船的失荷稳性[5-7],包括需要满足失荷后静倾角不大于15°,且不大于甲板边线浸水角;失荷情况下图5所示的GZ曲线下的面积比A1/A2须大于1.3等。图5中,RM(1)为失荷后的复原力矩曲线;RM(2)为失荷前的复原力矩曲线;HM(1)为失荷后综合考虑失荷力矩及反向压载力矩的倾覆力矩;HM(2)为失荷前综合考虑吊重力矩及反向压载力矩的倾覆力矩;θF为失荷后反向压载一侧的进水角、第二交角或30°之间的最小者;θE为失荷后的静倾角;θL为失荷前的静平衡角。

图5 ABS起重船失荷稳性衡准Fig.5 ABS stability criteria after loss of crane load
由于ABS失荷稳性衡准中要求针对失荷前与失荷后工况分别计算的GZ曲线及所获得的相关稳性参数加以分析,排水量及重心的变化不利于程序化稳性数值计算;同时图5中的GZ曲线均是针对初始正浮状态进行计算,将起重载荷和压载的综合影响作为外加倾覆力矩来考虑,这样不能真实反映实际装载工况下重心位置、船体浮态及自由液面的影响。因此,在分析中采用了原理等效的分析方法,即根据实际装载工况得到失荷后的GZ曲线进行稳性校核,如图6所示。图6中,GZ曲线与坐标轴的交点即为失荷后的静倾角,要求面积比b/a>1.3,其中失荷前的静倾角θc一律取吊机作业限制角3.5°,这是相对保守的。

图6 ABS失钩稳性衡准分析方法Fig.6 ABS analysismethod for crane-loss stability criteria
由于该船长宽比超过2∶1,分析表明横吊8 000 t载荷所产生的横倾力矩较纵吊16 000 t载荷对船型稳性影响更大,整船稳性受横吊8 000 t载荷工况下的失荷稳性控制。图7给出了稳性分析中铺管工况下的风面积模型,表1列出了各工况下主要的完整稳性分析结果,可以看出经优选的“八立柱”船型能够满足装载与稳性要求。

图7 大型深水半潜式起重铺管船“八立柱”船型稳性分析三维风面积模型Fig.7 3D wind model for stability analysis of large deep water sem i-submersible heavy lifting pipelaying vessel w ith 8 columns
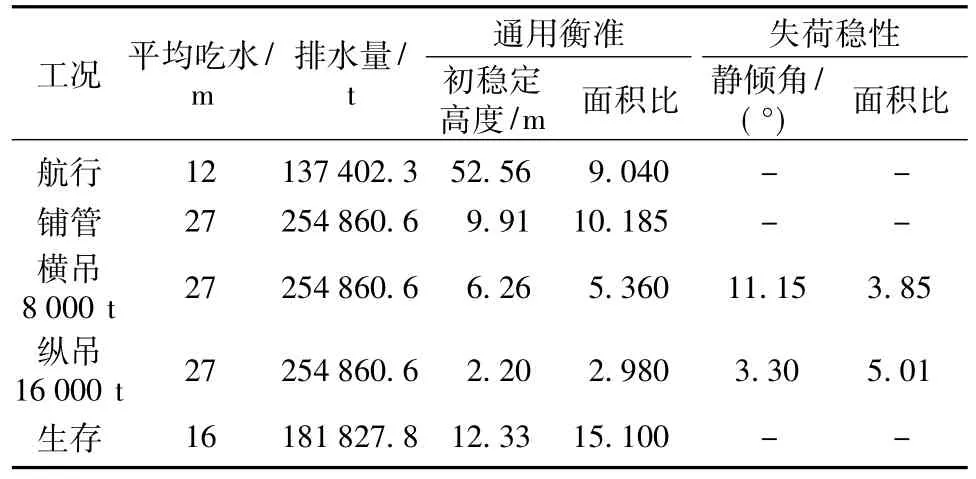
表1 大型深水半潜式起重铺管船“八立柱”船型各种工况下完整稳性分析结果Table 1 Intact stability results of large deep water sem i-subm ersible heavy lifting pipelaying vessel w ith 8 columns in different conditions
3 耐波性能对比分析
基于三维绕射理论,采用SESAM软件计算了“十立柱”与“八立柱”船型在规则波中各自由度的运动和指定点加速度的响应幅算子(RAO)[8],并结合海浪谱对船体在非规则波中的短期运动响应进行了统计分析,重点比较这2种船型的耐波性能差异。图8给出了2种船型的SESAM水动力分析湿表面模型。

图8 大型深水半潜式起重铺管船2种船型的SESAM水动力分析湿表面模型Fig.8 SESAM panelmodels for hydrodynam ic analysis of the two kinds of large deep water sem i-submersible heavy lifting pipelaying vessels
计算中取横摇临界阻尼5%,纵摇及垂荡临界阻尼3%,重点比较2种船型耐波性能差异,并对不规则波作用下的运动响应幅值作一个基本判断;对于阻尼系数是否适当,建议后期经水池试验加以确认修正。由于航行工况下浮箱出水,立柱差异对2种船型的运动性能没有影响,选取铺管、起重作业及生存工况进行对比分析,计算时海况条件选取见表2,采用 Jonswap谱,γ=3.3。
图9给出了2种船型在典型起重(纵吊16000 t)、铺管及生存工况下给定浪向角(β)条件下的运动RAO曲线,表3列出了不同装载工况下RAO峰值周期。对比发现在作业工况下,“八立柱”船型的纵摇及垂荡周期(为17~20 s)较“十立柱”船型普遍大1s,且RAO峰值有所降低或相当;“八立柱”船型横摇周期与“十立柱”船型相同(大于27 s),均能避开波浪周期,且“八立柱”船型横摇响应峰值较“十立柱”船型略大或基本相当。生存工况下,2种船型RAO峰值周期相同,在13~15 s之间,均未能避开波浪能量周期范围。

表2 大型深水半潜式起重铺管船设计海浪环境参数Table 2 Ocean parameters for design of large deep water sem i-subm ersible heavy lifting pipelaying vessel

图9 起重、铺管、生存工况下大型深水半潜式起重铺管船2种船型垂荡、纵摇、横摇RAO曲线Fig.9 Surging,pitching and rolling RAO curves under lifting,pipelaying and survival conditions of the two kinds of large deep water sem i-submersible heavy lifting pipelaying vessels

表3 大型深水半潜式起重铺管船2种船型运动响应峰值周期对比Table 3 Com parision of peak period ofmotion response of the two kinds of large deep water sem i-submersible heavy lifting pipelaying vessels
表4列出了2种船型在不同工况主浪向下的运动响应统计结果。可以看出:对于铺管及起重作业工况,因2种船型的固有周期均避开了波浪周期,响应值相对较小,如垂荡基本不超过1.5m,横摇、纵摇不超过1°,起重工况下钩头最大垂向加速度不超过0.5 m/s2;生存工况下,2种船型的响应极值也基本相当,但须引起注意的是,此工况下2种船型的固有周期均未避开波浪周期,响应值过大,如垂荡达到10 m,横摇18°,纵摇6°。
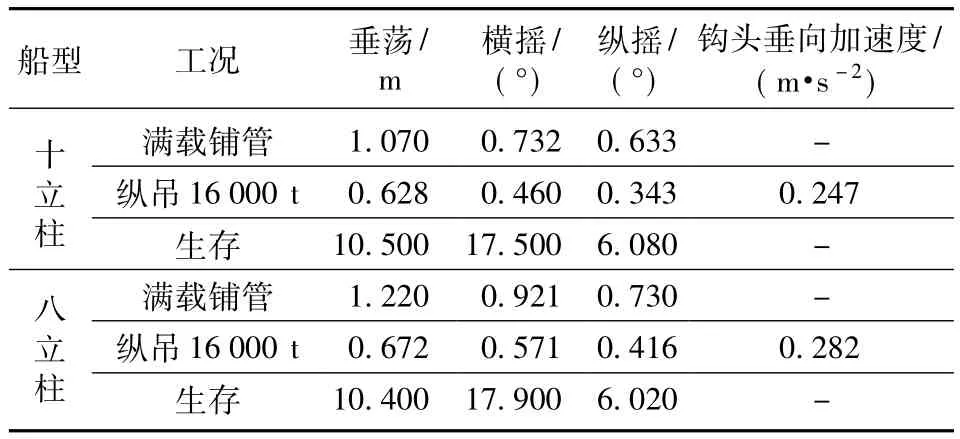
表4 大型深水半潜式起重铺管船2种船型运动响应幅值对比Table 4 Motion response comparisons of the two kinds of large deep water sem i-submersible heavy lifting pipelaying vessels
4 生存吃水优化调整
由于2种船型在生存工况下的固有周期均未能避开波浪能量周期范围,耐波性不佳,运动响应值过大,而且设计吃水16 m基本接近下浮筒型深15 m,在8 m波高情况下,浮筒出水会导致巨烈的砰击与非线性效应,对平台结构不利,因此应尽量避免,并考虑适当增加生存吃水。
由上述分析可知,大吃水工况下耐波性能较好,但增大吃水可能面临气隙不足的问题[9]。按照相关规范要求,除非结构设计中考虑波浪砰击,上平台底部与波峰之间应有适当的气隙[5-6],而且实际半潜式平台设计中通常按气隙大于零来考虑。可见,增大生存吃水主要受限于气隙,只有在耐波性与气隙之间寻找中间平衡点。
为保证足够的耐波性能与气隙,将“八立柱”船型生存吃水优化调整至20 m,此时计算结果显示RAO峰值明显低于吃水为16 m时的峰值,且横摇峰值周期降低至11 s,如图10所示;同时,在不规则波下的运动响应极值与气隙统计结果均较16 m吃水时明显降低,垂荡最大值不超过7.73 m,横摇4.82°,纵摇3.36°,而且气隙方面仅有2处出现负值,最小为-0.6 m。由于船体运动响应分析与所选阻尼系数有很大关系,建议经水池试验确认所给阻尼是否适当。这里重点考虑避免浅吃水时所产生的恶劣运动响应,也可考虑适当再减小吃水,建议吃水取19 m。
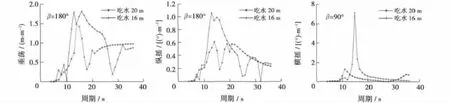
图10 大型深水半潜式起重铺管船优选的“八立柱”船型在不同吃水生存工况下的垂荡、纵摇、横摇RAO曲线Fig.10 Surging,pitching and rolling RAO curves under survival condition under different draughts of the opim ized large deep water sem i-submersible heavy lifting pipelaying vesselsw ith 8 columns
5 结束语
分析结果表明,与“十立柱”船型相比,“八立柱”船型在装载与稳性方面能够满足要求,耐波性能总体基本相当(垂荡、纵摇略优,横摇略差),这主要是因为受到起重工况下装载与稳性的限制,平台水线面积减小程度有限。“八立柱”船型明显更简洁而利于建造,侧向投影面积有所降低,对减小风、流载荷进而提高船体动力定位(DP)控位能力更为有利。另外,“八立柱”船型在降低空船质量、节省钢料方面要优于“十立柱”船型,综合经济性方面具有一定优势。因此,建议采用八立柱并设置横撑的船型,从改善耐波性能并保证气隙的角度出发,建议增加生存吃水至19 m。
由于半潜式起重铺管船一般同时具备起重、铺管、海上生活支持、自航与动力定位等多项功能,其优化设计应综合考虑不同工况下船舶对海上安全、作业效率、耐波性能等多方面的要求,所以本文针对某概念设计中的“十立柱”船型,从装载与稳性、耐波性、总体布置、建造难易程度与综合经济性能等角度给出了船型优化改进建议,对后续船型的深入研究具有一定的指导意义。
[1]康为厦,闵兵,李含苹.大型起重船的发展与市场前景[J].船舶,2009,20(6):13-17.Kang Weixia,Min Bin,Li Hanping.Development and market prospect of large crane ships[J].Ship & Boat,2009,20(6):13-17.
[2]黄维平,曹静,张恩勇.国外深水铺管方法与铺管船研究现状及发展趋势[J].海洋工程,2011,29(1):135-142.Huang Weiping,Cao Jing,Zhang Enyong.State of the art and developing trend of deepwater pipelaying and pipelaying vessel abroad[J].The Ocean Engineering,2011,29(1):135-142.
[3]杨立军,肖龙飞,杨建民.半潜式平台水动力性能研究[J].中国海洋平台,2009,24(1):1-9.Yang Lijun,Xiao Longfei,Yang Jianmin.Review on the study of hydrodynamics of semi-submersible platforms[J].China Offshore Platform,2009,24(1):1-9.
[4]罗超,王琮,毛建辉.深水半潜式起重船J-Lay系统布置研究[J].船舶,2011,22(5):5-9.Luo Chao,Wang Cong,Mao Jianhui.An investigation on J-lay system arrangement of deepwater semi-submersible crane vessel[J].Ship & Boat,2011,22(5) :5-9.
[5]中国船级社.海上移动平台入级与建造规范[S].北京:人民交通出版社,2012.China Classification Society.Rules for building and classingmobile offshore drilling units[S].Beijing:China Communications Press,2012.
[6]American Bureau of Shipping.Rules for building and classingmobile offshore drilling units 2014:part 3:hull construction and equipment[S].New York:ABS,2014.
[7]American Bureau of Shipping.Rules for building and classing offshore support vessels 2014:part 5:specialized service[S].New York:ABS,2014.
[8]王世圣,谢彬,曾恒一,等.3000米深水半潜式钻井平台运动性能研究[J].中国海上油气,2007,19(4):277-280,284.Wang Shisheng,Xie Bin,Zeng Hengyi,et al.Study on motion performance of3000 meters deep-water semi-submersible drilling platform[J].China Offshore Oil and Gas,2007,19(4):277-280,284.
[9]曾志,杨健民,李欣,等.半潜式平台气隙数值预报[J].海洋工程,2009,27(3):14-22.Zeng Zhi,Yang Jianmin,Li Xin,etal.Air gap prediction of a semisubmersible platform[J].The Ocean Engineering,2009,27(3):14-22.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
海洋通报(2021年5期)2021-12-21
海洋石油(2021年3期)2021-11-05
装备制造技术(2020年3期)2020-12-25
中国海上油气(2020年5期)2020-10-20
船舶(2020年4期)2020-08-29
电子制作(2019年19期)2019-11-23
船舶标准化工程师(2018年1期)2018-12-05
船海工程(2015年4期)2016-01-05
中国美容医学(2015年5期)2015-01-21
