
复杂杂波背景下机载预警雷达探测性能分析
2015-04-25 05:52连晓锋朱振波汪先超余方利雷志良
舰船电子对抗 2015年5期
连晓锋,朱振波,汪先超,2,余方利,雷志良,3
(1.空军预警学院,武汉 430019;2.解放军93617部队,北京 101400;3.解放军94362部队,青岛 266111)
0 引 言
机载预警雷达由于架设在预警机平台上,能够“登高望远”,探测范围的优越性是地面雷达无法比拟的。但是这也带来了一些问题,由于机载预警雷达通常处于下视工作,会接收大量地、海杂波,地、海杂波分布范围广、强度大,尤其在丘陵和山区地带,杂波强度可达60~90 dB[1];雷达与地、海面的相对运动使杂波产生了较大的多普勒频移,其频谱被展宽,目标容易淹没在杂波中,给目标检测带来严重的威胁,所以地、海杂波背景下机载预警雷达的探测性能分析一直以来都备受关注。掌握预警机雷达在具体作战环境下的作用距离和检测概率,这对于分析预警机雷达的探测威力、评估战场态势都有着重要的意义。
目前关于复杂杂波环境下机载雷达探测性能分析的文献有很多。文献[2]根据不同脉冲重复频率(PRF)工作模式(高脉冲重复频率(HPRF)和中脉冲重复频率(MPRF)),分别推导地杂波背景下机载预警雷达的作用距离方程,给出了信杂噪比与机载预警雷达作用距离的关系;文献[3]根据不同PRF工作模式(HPRF和LPRF),分别推导了均匀杂波背景下雷达作用距离与信噪比、杂噪比的关系。但这2篇文献所用杂波模型过于简单,没有考虑杂波幅度起伏和频谱分布情况,与真实环境相差太远。另外,这2篇文献对于距离上的重叠次数和频域上的重叠次数的计算有误差,并且没有考虑现代雷达普遍采用的脉压处理和相参积累带来的信号处理得益,与真实的机载脉冲多普勒(PD)雷达信号处理方式不符。
为了更好地进行机载预警雷达探测性能分析,得到地、海杂波背景下机载预警雷达的作用距离和探测概率,本文建立了逼近实际的杂波模型,并在该杂波模型的基础上,根据典型机载雷达信号处理流程对机载预警雷达的探测性能进行比较准确的评估分析,这对于及时准确地把握战场态势具有重要意义。
1 机载预警雷达的杂波建模
对机载预警雷达而言,杂波数据的采集难度很大。杂波数据的一个主要来源就是逼近实际的杂波模拟与仿真。考虑到机载预警雷达实际的杂波与反射地类有关且随时间变化,不同的地类(如沙漠、高山)有不同的反射强度,同一地面在不同时刻的反射强度也有变化[4]。因而,本文采用基于简化网格映像法的相干视频信号模拟方法,对机载相控阵雷达在不同地类和不同杂波起伏下的杂波进行建模与仿真。
1.1 机载预警雷达的杂波特性
机载预警雷达杂波建模的前提是了解杂波的特性。图1给出了机载预警雷达杂波频谱分布情况,可以看出机载预警雷达的杂波包括3个部分:主瓣杂波、旁瓣杂波和高度线杂波[5]。这3类杂波在距离和频谱分布上各有特点,但其实际信号在时间或者距离上更多的情况是混合在一起的。
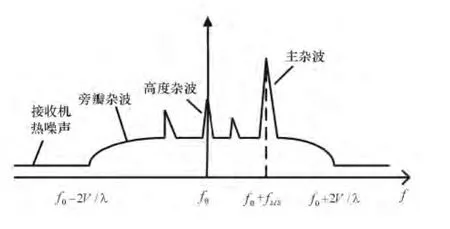
图1 机载雷达杂波频谱分布情况
通常情况下由于距离模糊等原因,在距离维只能简单地区分为杂波区和非杂波区,近距离区域为杂波区,远距离区域为无杂波区,如图2所示。图2中,目标①处于无杂波区,雷达不受杂波的影响,目标易于检测;而目标②、③处于杂波区,对处于强杂波中的目标,雷达探测难度大。杂波区与无杂波区的分界线的斜距等于机载雷达对地面目标的视距,为杂波区的范围为主要从机翼遮挡考虑,一般取值为其中α=,h为天线距离机翼的高度,L为机翼的长度,如图3所示。

图2 机载雷达杂波覆盖示意图

图3 预警机正视平面图
1.2 机载预警雷达杂波建模
为了简化仿真模型,本文作如下假设:
(1)在雷达相干处理时间内,杂波源的统计特性不变;
(2)在雷达相干处理时间内,载机的移动距离远小于雷达与杂波的斜距,即雷达与杂波的相对几何关系保持不变,雷达天线方向图的指向也不变;
(3)地球是理想球体;
(4)载机作匀速直线运动[4,6-7]。
机载预警雷达的杂波建模采用基于简化网格映像法的相干视频信号模拟方法。网格映像法根据雷达分辨率的大小将波束照射区域划分为很多相互独立的网格单元,把网格内的所有点散射体相加,形成一个新的复合散射体,作为一个点散射体进行处理。这样地杂波回波信号就被转化为波束照射区域内所有点散射体回波信号的相干求和[6-8]。为简化处理,提高计算速度,将多普勒频率分辨率转化为方位角分辨率,在地杂波平面建立单元大小为Δθ×ΔR的网格单元即杂波单元,如图4所示。其中Δθ由方位角分辨率确定,ΔR由距离分辨率确定。
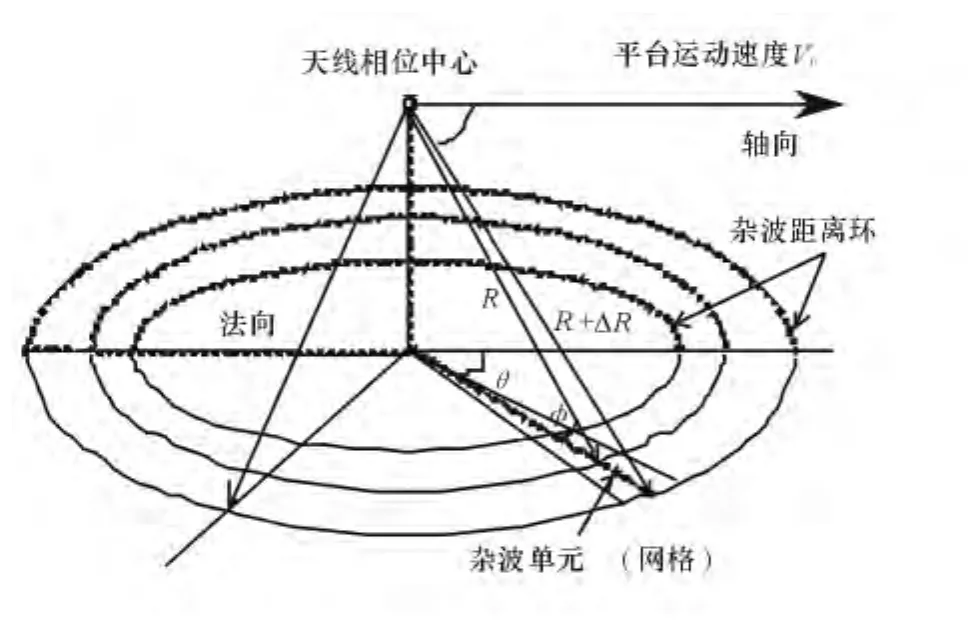
图4 机载雷达与地面关系几何模型
杂波单元的反射模型、幅度起伏模型、频谱分布以及雷达系统参数是影响杂波的四大主要因素。在机载雷达杂波仿真时,需要将上述四者结合起来考虑。
(1)杂波单元的反射模型
杂波的强弱通常用单位面积的杂波雷达截面积即反射率来表征,常用的地、海杂波反射率模型是Morchin模型[9],该模型很好地描述了地、海面杂波的反射特性,对于沙漠、农田、丘陵和高山以及1~5级海情的杂波反射率都有较好的描述,表达式如下:

式中:σ0为反射率;ψ为擦地角;对于海杂波u=1,而对于地杂波为雷达工作频率,单位为GHz;其它参数见表1。
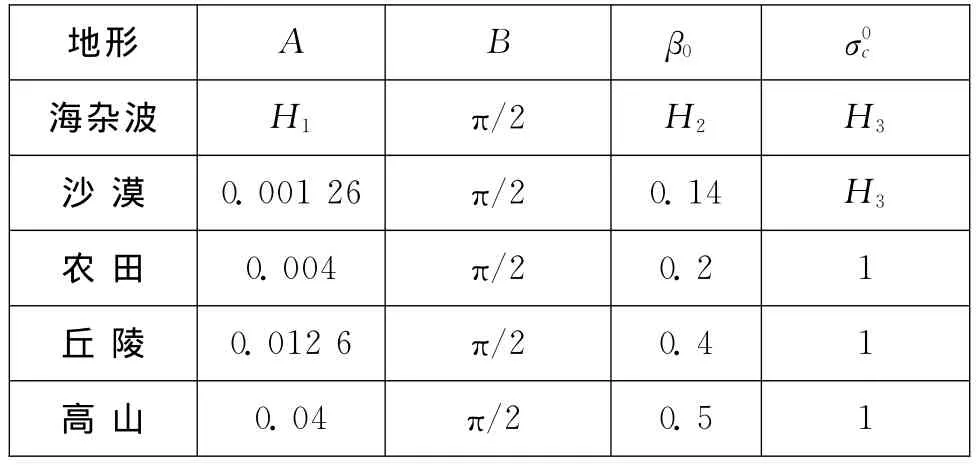
表1 Morchin模型中反射率参数设置

式中:Re=8 490 km,为地球的曲率半径;H为载机高度。
(2)杂波单元的幅度起伏模型
反射率反映的是杂波的平均强度,而具体到某一杂波单元,不同时刻的回波一般是不同的,其振幅和相位一般都是随时间变化的。对于特定的雷达和环境,通常认为杂波的相位在(0,2π)内服从均匀分布,幅度服从一定的统计分布。迄今为止用来描述雷达杂波幅度分布的统计模型主要有:瑞利分布、Log-normal分布、Weibull分布和K分布等。根据大量实测数据印证,在沙漠、农田等地形时可采用Weibull分布,而丘陵、高山则应采用Log-normal分布[11]。
(3)杂波单元的频谱分布模型
风速、雷达平台的运动会使雷达杂波单元内各散射体具有一定的速度起伏,从而使雷达杂波的多普勒频谱具有一定的分布。雷达杂波模拟中通常采用高斯谱和立方谱,这里选用高斯谱,因为大多数的数据与它吻合,其功率谱密度函数为:

式中:σf为杂波谱的标准偏差,它与杂波速度起伏展宽值σv的关系为:

Nathanson[12]和 Barton[13]给出了由风速引起的地、海杂波的速度起伏:

对于机载雷达来说,平台的运动也带来相应的速度起伏,其最坏估计值(即最大估计)为:

式中:V r为载机的运动速度;θ3dB为扫描方位的半功率波束宽度(弧度)。
这样,总的杂波速度起伏可以表示为:

可以合理地认为杂波回波间的相关性很强,即功率谱的宽度很窄。这样,在频谱的半功率宽度内至多只需进行2次采样。为了精确逼近功率谱密度,只需对频谱采样5或7次即可,设频谱采样间隔为Δf,对功率谱密度进行M次采样,有:

采样相对于频谱是对称的。为了产生相关时间序列,建立一个独立的随机相位序列ξk,其中每个相位矢量具有单位的平均功率,这样有:

(4)机载预警雷达参数
雷达参数对杂波功率的影响可以归结为雷达的有效接收功率密度:

式中:Pt为雷达的脉冲功率;Du为压缩比;Gt(θ,φ)和Gr(θ,φ)分别为发射天线和接收天线在杂波单元(θ,φ)处的功率增益;r(t)为杂波单元至雷达天线相位中心的距离;Γ为接收系统损耗;Gt0为天线的最大功率增益;Gr0为接收通道的最大功率增益;为发射天线的方向性函数;为相控阵天线接收通道的方向性函数。
将式(16)、(17)代入式(15),可以得到第l个距离环第i个网格的单通道杂波信号为:

通过对来自同一距离环的各个网格进行叠加得到单一距离环的杂波信号,然后根据距离模糊特性将来自各个距离环的杂波信号进行叠加求和,得到指定距离环的杂波信号,则第r个距离单元上第k个脉冲的单通道杂波信号为:

根据式(19)可以求出一次模糊区内的各距离单元的杂波信号。
2 PD雷达探测性能分析
实战环境下决定机载预警雷达作用距离和探测概率的是信杂噪比。只有经过典型的机载雷达信号处理后计算得出的信杂噪比才能更好地估计机载雷达作用距离和检测概率。
2.1 PD雷达的目标检测流程
PD体制下的机载雷达信号处理一般为距离门脉冲多普勒方法。为了能检测目标,同时测出目标的距离和速度,将每个脉冲重复周期内所对应的距离分隔成与脉压后脉冲宽度相匹配的距离门,按各个距离门进行处理。信号处理主要包括脉压、主杂波对消、脉冲多普勒滤波和针对MPRF的二维平均单元-恒虚警率(CA-CFAR)检测,如图5所示。

图5 PD雷达信号处理框图
2.2 机载预警雷达探测性能分析
(1)雷达的目标回波
计算目标回波功率时PD雷达和常规雷达同样适用经典的雷达方程,与常规雷达不同的是,PD体制的机载预警雷达仿真还需计算目标信号的多普勒频率,则距离模糊后目标所在距离单元第k个脉冲的单通道回波信号为:

模糊后目标所在距离单元为:

(2)接收机热噪声
雷达接收机中会存在固有的系统热噪声,在模拟时可以假定系统噪声为零均值高斯噪声,其方差σn2等于接收系统的热噪声功率,即:

式中:k=1.38×1 024 J/°k Hz,为波尔兹曼常数;T0为绝对温度(一般取T0=290 K);B为接收系统的带宽;Fn为接收系统噪声系数。
由σn2作为方差产生的零均值复高斯随机分布数V N便可以代表接收通道的热噪声信号。目标所在距离单元(模糊后)的噪声信号可表示为:

式中:F为分布函数值(0~1),用于产生瑞利幅值;Nrand为随机数。
从式中可以看出噪声信号是非相关的。这样,模拟的与目标竞争的第k个脉冲的相干视频杂波噪声信号可以表示为:

(3)信杂噪比和检测概率的计算
机载预警雷达接收到的原始数据为M×N矩阵,其中M为相干脉冲数,N为距离单元个数。模糊后目标所在的位置可以根据式(20)计算得出,每个距离单元处第k个脉冲的回波脉冲为 ()Vk+对该原始数据的每个距离单元进行自适应动目标显示(AMTI)处理完成主杂波对消。本文采用三脉冲对消,并假设采用三脉冲对消后,主杂波对消得较为彻底。主杂波对消后,目标的杂波背景为主杂波剩余和旁瓣杂波。对AMTI后每个距离单元的脉冲信号进行快速傅里叶(FFT)处理,完成相参积累[14]。此时,根据目标和雷达参数计算出目标的回波功率以及目标回波多普勒频率,并依据FFT点数确定目标所在多普勒通道的位置,接着根据距离-多普勒单元确定与目标抗争的杂波和噪声功率,进而确定输出信杂噪比,最后经CFAR处理后由信杂噪比计算出检测概率。
相参积累后杂波幅度服从瑞利分布,平方率检波后服从指数分布,输出为高斯分布(根据中心极限定理)的距离-多普勒域二维平面,此时有用目标只占据有限的时宽和带宽,而杂波却占据整个二维平面,这样就可以提高目标的信杂噪比,有利于目标检测。由于本文选取的PRF为中重频,因此可以在距离-多普勒域进行二维CA-CFAR处理。
在考虑累积检测概率,即系统检测概率,一般临界检测为0.5,可靠检测为0.9,根据给定的M/N准则,可以算出所要求的单帧检测概率。两者的关系为:

对于存在目标的距离门-多普勒滤波器而言,其检测概率即为单帧检测概率P d。本文采用2/4准则,则与临近检测相对应的检测概率为0.385。
3 仿真分析
仿真实验在不同地杂波背景下进行,由本文推导的信杂噪比、检测概率计算方法,生成作用距离和信杂噪比的关系图以及信杂噪比与检测概率的关系图。
选用的MPRF工作模式预警机雷达参数如下:天线为16(行)×64(列)的矩形面阵,接收行子阵、列子阵都采用40 d B的切比雪夫加权;发射机功率Pt为180 k W;接收系统噪声带宽B为1 MHz;接收机噪声系数Fn为3.5 d B,系统损耗Ls为11 d B;重复频率f r为7 500 Hz;FFT点数为128,相参积累得益N为54,占空比为1/10。
另外,预警机距离地面高度H为9 000 m;预警机速度V a为140 m/s;防止目标信号与高度线杂波重叠,取α=15°,Rcmin=25 km;目标的雷达截面积σt为5 m2。
图6是MPRF工作模式的机载预警雷达作用距离与信杂噪比的关系图,图7是不同杂波背景下的CFAR检测性能曲线。
按照雷达检测目标要求确定检测因子,通过图6可以查出对应的机载预警雷达的最大作用距离。达到临近检测概率所要求的检测因子大约为13 dB左右,MPRF工作模式下,沙漠环境下机载预警雷达的作用距离为340 km左右,农田环境下次之,丘陵环境下更小,而在高山环境下只有160 km左右。可见不同杂波环境对机载预警雷达的作用距离的影响很大。
4 结束语
本文在建立逼近实际杂波模型的基础上深入探讨了机载预警雷达的探测性能,得出如下结论:

图6 MPRF工作模式的作用距离与信杂噪比关系图
(1)逼近实际环境的杂波模型对机载预警雷达探测性能分析至关重要,同时考虑机身遮挡问题能进一步提高分析精度,为机载预警雷达探测性能分析提供了新思路。
(2)不同杂波环境对机载预警雷达的作用距离的影响很大,为具体环境下战场态势评估提供了依据。
[1]卉德,韦传安,林幼权.机载雷达技术[M].北京:电子工业出版社,2006.
[2]邓有为,王晟达,甘轶,王峰.地杂波背景中机载预警雷达作用距离分析[J].微计算机信息,2009,25(1):152-154.
[3]A simple method to determine airborne radar detection performance in clutter[A].IEEE National Radar Conference[C],1993:192-196.
[4]汤子跃.相控阵机载预警雷达对悬停直升机目标的检测技术研究[D].武汉:海军工程大学,2000.
[5]莫里斯G V.机载脉冲多普勒雷达[M].季节,许伟武译.北京:航空工业出版社,1990.
[6]阮锋,李明,吴顺君.一种简捷的机载PD雷达地杂波仿真方法[J].现代雷达,2006,28(12):30-32.
[7]王永良,彭应宁.空时自适应处理[M].北京:清华大学出版社,2000.
[8]程爱军.雷达回波信号模拟与仿真[D].南京:南京理工大学,2004.
[9]Morchin W C,Airborne Early Warning Radar[M].Boston,USA:Artech House,1990.
[10]Friedlander Alan L,Greenstein Larry J.Generalized clutter computation procedure for airborne pulse Doppler radars[J].IEEE Transactions on Aerospace and Electronic Systems,1970,6(1):51-61.
[11]Nathanson F E,Radar Design Principles[M].New York:McGraw-Hill,1969.
[12]Barton D K.Radar System Analysis[M].Norwood,MA:Artech House,1977.
[13]叶葵如,朱兆达.中等PRF机载PD雷达频域恒虚警处理性能计算[J].航空学报,1988,9(11):1586-1590.
[14]杜鹏飞,王永良,孙文峰.机载监视雷达地杂波背景中的CFAR检测方法[J].系统工程与电子技术,2004,26(3):321-324.
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
科学与信息化(2021年30期)2021-12-24
北京航空航天大学学报(2021年9期)2021-11-02
有色设备(2021年4期)2021-03-16
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
雷达与对抗(2020年1期)2020-06-05
医学新知(2019年4期)2020-01-02
制导与引信(2017年3期)2017-11-02
北京航空航天大学学报(2017年10期)2017-04-20
