基于工作流的舰载机作战指挥引导*
2015-04-23 09:19:50李京
指挥控制与仿真 2015年6期
李 京
(海军航空工程学院,山东 烟台 264001)
舰载机在作战中,尤其是与其它兵力联合对面实施打击时,各行动兵力间的协同显得尤为重要。为了保证舰载机在作战全过程能够接收不间断指挥控制,避免与其它兵力发生冲突甚至误伤,对舰载机的作战指挥引导是其重要组成部分。指挥引导效率的高低直接关系到舰载机作战效能的发挥。指挥引导效率的高低除了与情报、通信保障能力、指挥控制系统可靠度等因素有关外,还与指挥引导程序、方式和方法运用等理论有关。以美国为代表的世界军事强国在舰载机作战指挥引导方面积累了大量经验,形成了指挥引导的纵短横宽扁平化,集中指挥和分散指挥相结合,更注重分散指挥的特点。而为了充分发挥分散指挥的优势,就必须保证各级指挥机构能够统一、高效地进行运转和衔接。在此情况下,可以认为舰载机的作战指挥引导是由许多流程构成的,引入工作流思想建立一套适合指挥引导的系统,从而有效地帮助指挥员及参谋完成工作。
工作流是针对日常工作中具有固定程序的常规活动提出的一个概念,是一类能够完全或部分自动化执行的过程,在办公自动化、集成制造、电子商务等领域发挥了重大作用。目前工作流过程建模的研究还处于发展阶段,现有的过程建模方法仍存在很多不足。主要的建模方法有流程图方法、Petri网模型、EPC方法、UML活动图方法等[1]。在诸多的建模方法中,传统的建模工具相对于UML有以下不足:一是在处理意外情况时,容易产生所谓的“僵化”问题;二是传统模型在进行工作流建模时,不能很好地反映流程中的反馈特点;三是时域问题,必须要考虑到工作流的时间状态的变化。
在舰载机的作战指挥引导中,各机构间的行动具有交互性、动态性和并发性的特点,适合采用Petri网和UML活动图这样的工具来进行建模。本文利用UML工具的直观性和Petri网的数学严谨性,提取它们的优点,建立高质量的指挥引导工作流模型,从而优化整个作战指挥过程。
1 舰载机作战指挥引导阶段划分
舰载机对面作战的指挥引导主要可以分为3个阶段:本舰管制区、航路区和目标区,如图1所示。
·本舰管制区主要负责舰载机的起降,主要的指挥机构包括:航管中心、飞行塔台和作战指挥控制中心。
·航路区主要实施舰载机进入出航点后的指挥引导,包括飞机的出航、返航以及敌我识别。在这一阶段,主要的指挥引导机构是作战指挥控制中心;同时,根据作战需要可以将飞机的控制权移交给空中指挥控制平台。
·目标区是舰载机对面作战指挥引导的最后一个阶段,也是最为复杂的阶段。因为,在联合作战条件下,目标区可能存在己方地面部队和防空部队。当飞机进入目标区后,指挥引导权可以移交给区域防空指挥机构和目标区的目标引导组。

图1 舰载机对面攻击指挥引导阶段划分
2 基于UML的指挥引导模型
当舰载机实施空对面作战时,通常由作战指挥控制中心对舰载机实施统一指挥和控制。根据作战行动需要,作战指挥控制中心会适时授权空中指挥控制平台或前出具有指挥引导能力的水面舰艇或指挥引导组,对一定区域的舰载机实施指挥引导,确保作战行动的顺利实施。有时由于雷达探测、通信保障等不能满足舰载机遂行空对面作战任务的需要,作战指挥控制中心会指派空中指挥控制平台或前出的具有对空引导能力的水面舰艇担任指挥引导中继平台,确保舰载机按预定航线飞行,合理处置空中突发事件,准确地引导舰载机发现和截获预定目标并实施攻击。
整个作战指挥引导模型的用例图,各个飞行阶段的活动图如图2-6所示。

图2 舰载机作战指挥引导用例图
2.1 作战指挥引导用例图
图2表述了舰载机作战指挥引导的用例视图。它将系统功能划分成对参与者(即系统的用户)有用的需求。而交互功能部分被称作用例[2]。从该用例图中可以看出,在指挥引导的全过程中主要有8个用户:舰载机、塔台、航管中心、作战指挥中心、空中指挥平台、目标引导组、地段防空指挥员、防空警戒舰。每个用户在作战指挥引导的不同阶段发挥着各自的作用。
2.2 作战指挥引导活动图
UML提供了丰富的符号表示和建模机制,其中活动图是5种为系统建立动态模型的图之一[3]。活动图强调在对象中发生的活动,包含行为状态(action state)和活动状态(activity state),行为状态和活动状态是用侧面为圆弧的矩形表示。一个行为状态或者活动状态完成后,控制流将立刻到达下一个行为或者活动状态。我们用跃迁来表示这种从一个状态到另一个状态的流动。在语义上,活动图中的这种跃迁是非触发的跃迁,或者说是完成跃迁,因为一旦行为或者活动状态完成,控制流就马上转移。在UML活动图中,跃迁用带箭头的实线表示。
图3-图6描述了在舰载机作战指挥四阶段中,各个指挥控制机构围绕着舰载机空对面作战而进行的指挥引导活动。
·在起飞阶段,以舰载机请示起飞这一活动为起点,以舰载机飞离航母管制区为该阶段的重点。从图中可以看出,塔台、航管中心和作战指挥中心依据作战条件负责指挥引导:目视条件下的起飞由飞行塔台负责;而当进入仪表飞行时由航管中心通过雷达进行指挥;当遇到紧急任务时,则可以由作战指挥中心直接引导飞机起飞。

图3 起飞阶段活动图

图4 航路阶段活动图
·在舰载机的航路阶段,作战指挥引导的主要职责由作战指挥中心承担,同时航管中心全程进行监控,当遇到特殊情况及时上报作战指挥中心,后者进行对舰载机飞行进行修正;当作战指挥能力受探测手段和通信条件限制时,可以将指挥引导权递交给空中指挥平台。
·当舰载机进入目标区后,其指挥引导活动最为复杂,涉及的用户最多。其主要活动由在目标区的目标引导组负责;同时,如果有己方地面防空力量的存在,为了防止误伤,当舰载机接近地面部队防空区域时,要接受地段防空指挥结构的指挥;而整个目标区的活动,作战指挥中心都进行全程监控。
·当舰载机执行完空对面攻击任务后,将进入返航阶段。其中最为关键的是当舰载机进入航母管制区前的敌我识别,此时,舰载机要受到防空警戒舰的指挥,使其进入防空识别区进行敌我识别。当判明是我机后则将指挥权交予航管中心进行进近引导。
3 基于Petri网的建模验证
本文通过统一建模语言UML建立了舰载机作战指挥引导的工作流模型。但是,所建立的模型有可能存在一定的缺陷,这种缺陷往往就是隐患所在,所以在设计的初期,系统实现之前,发现并解决这一缺陷就成为一个关键问题。

图5 目标区阶段活动图

图6 返航阶段活动图
Petri网是一种系统的数学和图形的建模分析工具,不仅可以清楚地描述系统内部的相互作用,体现出系统的动态行为,而且用Petri网建立的模型具有成熟的数学分析方法[4]。可以对具有并发、同步、冲突等特点的系统进行模拟和分析,广泛应用于复杂系统的设计与分析中。基于Petri网的这种优点,可以很好地克服UML在这方面的缺点。鉴于这两种建模工具的特性,用两种工具从不同的侧面对系统建模分析,实现优劣互补,得到了较好的效果。
3.1 UML活动图映射为Petri网模型规则
由UML活动图转换到Petri网方法的主要思想是用库所表示活动,用变迁表示活动的跃迁。UML活动图的顺序结构对应Petri网的顺序结构;UML活动图中表示分支的菱形,对应Petri网中的OR-Split、OR-Join;UML活动图中表示并发的分叉同步棒对应Petri网中的ANDSplit,表示并发的合并同步棒对应Petri网中的ANDJoin。活动图与Petri网基本图形元素映射关系如图7所示。

图7 UML向Petri网转换规则
3.2 作战指挥引导的Petri网模型
根据上述转换规则,可以将舰载机作战指挥引导UML模型转换为Petri网模型。限于篇幅限制,这里只列出目标区作战指挥引导模型的转换结果。如图8所示。

图8 目标区指挥引导Petri网模型
Petri网中变迁所代表的活动如表1所示。
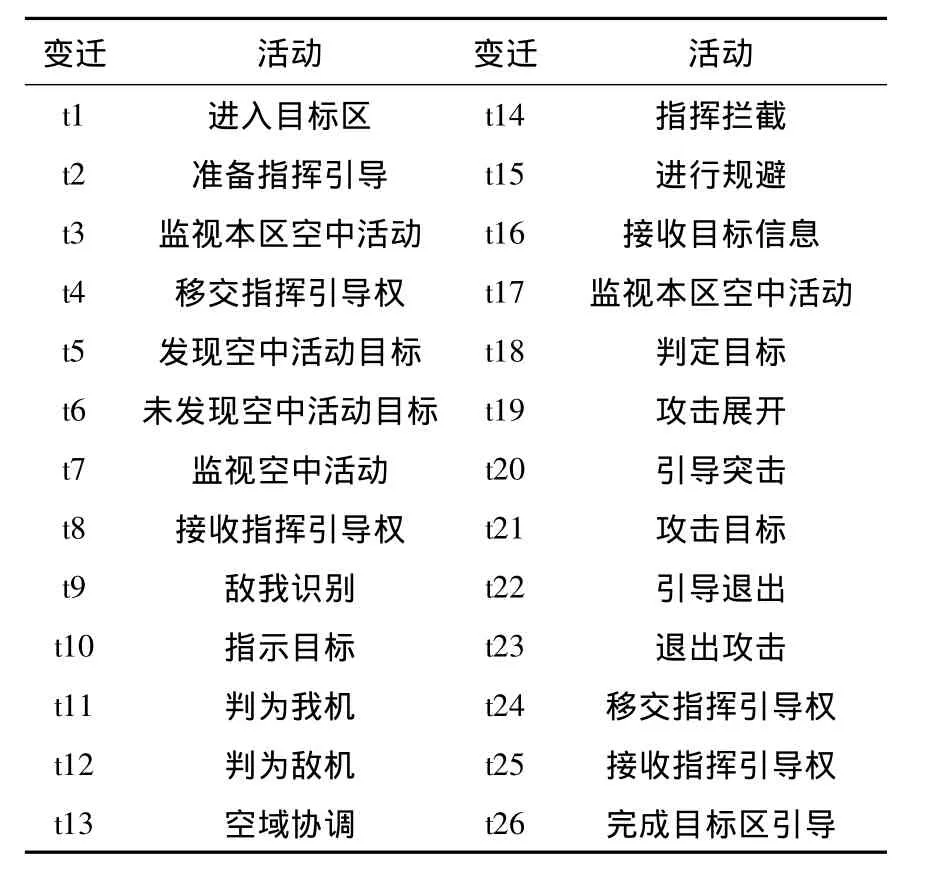
表1 目标区作战指挥引导变迁表
3.3 基于Petri网模型的正确性分析
大型的作战指挥系统,一个修改或导入都可能会对整个系统产生重大影响,所以必须保证其正确性。前面已经利用UML工具建立了指挥引导的一般模型,这里通过Petri网的合理性分析,验证该模型的正确与否。通常验证合理性所采取的办法是根据过程模型的特点,选取便于验证的几种特性(如:可达性、合理性、自由选择性、良构性、S可覆盖性等),然后根据性质间的因果关系进行正确性分析。
3.3.1 可达性分析
Petri网的初始状态决定了哪些状态可达,以及它们的到达次序。因此Petri网一旦确定,被建模过程的可能行为就是确定的,通常利用可达图作为描述工作流行为的方法。图9为本模型的可达图。
图中一共有26种可达状态,但并不是每种状态都发生。比如,只有在(0,0,0,0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0)下,状态(0,0,0,0,0,0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0)才会发生。通过建立可达图,可知该模型满足可达性。

图9 目标区指挥引导的可达图
3.3.2 合理性分析
我们可以看到当赋予了初始状态后,当指挥引导任务完成时,整个过程最终都能来到结束状态,并且其它所有状态都是空的;另外,通过可达图该模型不存在死任务,即模型中的任意状态都可以在特定条件下达到。可知该模型满足合理性。
3.3.3 自由选择性分析
如果在一个工作流网里两个变迁t1和t2共享一个输入库所,即·t1∩·t2≠ø,那么它们应该是OR-split的一部分,即很多可选项之间的一个“自由选择”。所以,t1和t2的那组输入库所应该是匹配的,即·t1=·t2。
由图8的工作流网模型可以看出:变迁T5和T6共享一个输入库P2,变迁T11和T12共享一个输入库P7;显然它们的输入集合相等,因此,所构建的工作流网是有选择的。
3.3.4 良构性和S可覆盖性分析
获得一个具有“好的”结构性的工作流的一个方法是,平衡AND/OR-split和AND/OR-join。由一个AND-split初始化的两个并行流不应该由一个OR-join进行汇合。通过一个OR-split创建的两个选择流也不应该由一个AND—join进行同步。如图8所示,T2(AND-split)到T26(AND—join)符合平衡的并行路由。可见,所建的工作流网符合良构性。根据定理,一个合理的自由选择的WF-net是S可覆盖的。
所以,通过图8和图9,可以证明利用UML所建立的目标区作战指挥引导工作流模型是合理的、符合确性验证。
4 结束语
本文建立了一个基本的舰载机对面目标作战指挥引导工作流模型;利用UML工具的可视化、界面友好的特点,同时,又利用Petri网的数学严谨性对该模型进行验证;通过两种工具的结合使用,可以较为快速和准确地进行作战指挥引导系统的原型开发。
但是,由于受到篇幅和研究条件的限制,为了突出舰载机作战引导的整体性,对作战指挥引导中的一些问题进行了简化,比如,作战指挥中心、空中指挥控制平台、目标引导组三者之间指挥引导的交接没有进行详细的描述。所以,在下一步的研究中,将进一步细化整个工作流过程。
[1]刘宝代,张建,刘冰寒.基于UML活动图和Petri网电子政务工作流建模研究[J].计算机应用与软件,2011,28(6):155-158.
[2]James Rumbaugh,Ivar Jacobson,Grady Booch.The Unified Modeling Language Reference Manual[M].China Machine Press,2001.
[3]孙云,张东升,王日恒.基于UML的装备保障指挥控制工作流模型[J].装甲兵工程学院学报,2008,22(1):23-28.
[4]张筠,崔哲,张宇渊.UML和Petri网的建模验证方法[J].火力与指挥控制,2013,38(10):154-158.
[5]Murata T.Petri Nets:Properties,Analysis and Applications[J].Proceedings of the IEEE,1989,77(4):541-580.
[6]赵国毅,张广泉.基于Petri网和UML的流水作业调度模型设计及实现[J].重庆师范大学学报(自然科学版),2008,25(2):40-46.
[7]赵俊峰,周建涛,邢冠男.UML活动图到Petri网的转换方法及实现研究[J].计算机科学,2014,47(7):143-149.
[8]Hillah L M,Kindler E,Kordon F,et a1.A primer on the Petri Net Markup Language and ISO//IEC 15909-2[J].Petri Net Newsletter,2009,76:9-28.
[9]乔李明,李发彬.基于UML—OOPN的武器装备体系可靠性建模方法[J].电子设计工程,2013,21(24):134-139.
[10]万里威.UML模型到面向对象Petri网模型的映射[J].电脑与信息技术,2007(4):40-42.
猜你喜欢
军事文摘(2022年11期)2022-06-24 09:22:46
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:16
——以三江口港产城新区为例
华南地震(2022年1期)2022-04-06 05:54:22
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
科学导报·学术(2019年3期)2019-09-10 07:22:44
——以河南省为例
办公室业务(2019年14期)2019-08-01 02:33:28
电脑知识与技术(2017年1期)2017-03-24 11:37:57
电子制作(2017年23期)2017-02-02 07:16:51
中国卫生统计(2016年1期)2016-12-27 08:49:07
军事历史(1994年3期)1994-08-21 06:09:22