
浅析直线区段接触网下锚拉线坑的量化定位
2015-04-20 20:18:46苏长寿
科技创新与应用 2015年11期
摘 要:通过对拉线的受力分析,拉线系统的几何尺寸计算,提出了拉线坑量化定位的方法。解决拉线施工过程中凭经验施工,质量不稳定问题,规范拉线施工测量定位、检测、控制的方法,实现施工全过程的质量量化控制。
关键词:接触网;拉线坑;量化;定位
接触网悬挂下锚拉线是整个接触悬挂系统中最重要的受力部件,其施工质量的优劣,直接影响着供电安全。由于受地形和技术参数的限制,拉线坑的精确定位、过程检测均难以量化确定。目前拉线坑位的施工方法是目测定向,钢尺丈量的粗放定位方法。定位精度受现场施工人员的经验和现场参照系的选取影响较大。特别是锚板拉线的施工,由于拉线棒的角度、方向不易控制,往往在上部施工放线完毕后拉线棒产生位移,造成锚柱反倾,甚至锚柱折断,造成塌网事故,给安全运营埋下了不可估量的安全隐患。
为此作者对下锚拉线施工进行了详细研究,通过对双拉线的张力分析,找出了双拉线在支柱上的合力位置;通过对拉线系统的几何分析,找出了拉线基坑精确定位的方法。较好地解决了凭经验施工对质量的不利影响,实现了施工标准的量化管理,施工过程和施工结果检验、测量数值化。具体情况如下:
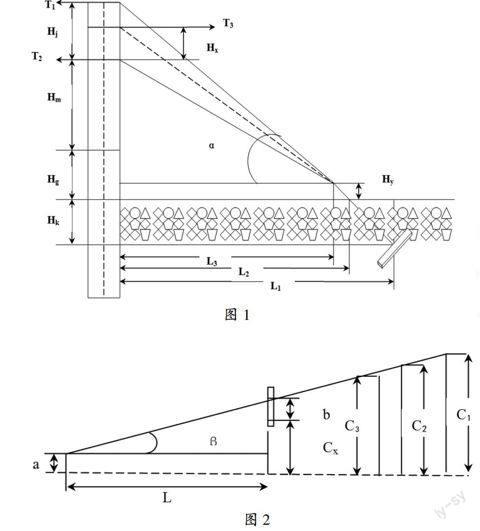
1 拉线坑顺线路方向位置的确定(如图1)
图1
1.1 图1图示说明
T1:承力索水平张力;T2:接触线水平张力;T3:双拉线合力的水平分力;Hx:双拉线合力作用点至接触线张力作用点的间距;Hy:拉线基础或拉线棒最高点至地面的距离;Hj:承锚角钢与线锚角钢的间距;Hm:线锚角钢至轨面的安装高度;Hg:轨面至地面的高度;Hk:基坑中心至地面的安装深度;L1:拉线坑中心至支柱的距离;L2:拉线棒出土点至支柱的距离;L3:拉线基础或拉线棒最高点至支柱的距离;α:双拉线合力或拉线棒与地面的夹角。
1.2 双拉线合力作用点位置的确定
利用杠杆原理可知:Hx=T1*Hj/(T1+T2) (1)
1.3 拉线坑中心至支柱的距离
由图1可知:L1=(Hx+Hm+Hg+Hk)*ctg(α)
将(1)式代入得:
ctg(α)=[T1*Hj/(T1+T2)+Hm+Hg+Hk]/L1(2)
1.4 拉线棒出土点至支柱的距离
由图1可知:L2=(Hx+Hm+Hg)*ctg(α)
将(1)、(2)式代入得:
L2=[T1*Hj/(T1+T2)+Hm+Hg]*[T1*Hj/(T1+T2)+Hm+Hg+Hk]/L1(3)
1.5同理可計算出拉线基础或拉线棒最高点至支柱的距离
L3=[T1*Hj/(T1+T2)+Hm+Hg-Hy]*[T1*Hj/(T1+T2)+Hm+Hg+Hk]/L1
2 拉线坑垂线路方向位置的确定(如图2所示)
2.1 图2图示说明
β:锚支偏移线路中心角度;a:转换柱处锚支偏移值;b:锚柱处锚支投影至锚柱沿距离;L:锚柱至转换柱间距离;Cx:锚柱限界;C1:拉线坑中心限界;C2:拉线棒出土点限界;C3:拉线基础或拉线棒最高点限界。
2.2 锚支偏角计算
由三角函数公式可知:tan(β)=(Cx+b-a)/L(4)
2.3 拉线坑中心限界计算
由图2可知:C1=Cx+b+L1*tan(β)
将(4)式代入上式化简后得C1=Cx+b+L1*(Cx+b-a)/L
2.4 同理可计算出拉线棒出土点限界
C2=Cx+b+L2*(Cx+b-a)/L
2.5 拉线基础或拉线棒最高点限界
C3=Cx+b+L3*(Cx+b-a)/L
3 拉线坑位置的确定流程
(1)依次计算出L1、L2、L3、和C1、C2、C3。
(2)在锚柱处以下锚角钢在地面上投影点为圆心,向拉线方向以L1为半径画弧。
(3)以锚柱处线路中心为起测点,向拉线方向量取L1并标记为O1。
(4)以O1为圆心,以C1为半径画弧。两弧交点即为拉线坑中心位置。
(5)同理通过L2和C2、L3和C3可以确定拉线棒出土点位置P点、拉线基础或拉线棒最高点位置Q点。
(6)在O点四周合适位置打上附桩,以便于基坑开挖定位和开挖过程检测。
(7)分别在P、Q点位置各打一木桩;且P点木桩与地面平齐,以便检测、控制拉线棒角度。
(8)O、P、Q三点配合可以确定拉线棒偏移线路中线方向和拉线棒与地面埋设角度。
4 量化定位的优点和特点
解决了拉线棒埋设凭经验施工的难题,提高了工程质量。可实现后续拉线预制工厂化、安装标准化。施工精度高,消除了拉线棒受力后的位移,提高了后续工程安装的质量和安全性。适应性强,此方法不仅适应于双拉线、锚板拉线定位,还适应于单拉线、拉线基础定位施工。
参考文献
[1]TB10208-98.铁路电力牵引供电施工规范[S].
[2]TB10421-2003.铁路电力牵引供电工程质量验收标准[S].
作者简介:苏长寿(1965,11-),男,民族:汉,研究方向:工程施工与管理,任职单位:北京铁路局石家庄工程项目管理部。
猜你喜欢
云南画报(2021年10期)2021-11-24 01:06:38
导航定位与授时(2020年5期)2020-09-23 03:05:00
铁道通信信号(2020年9期)2020-02-06 09:16:06
知识经济·中国直销(2018年3期)2018-04-12 06:43:37
上海铁道增刊(2017年3期)2018-01-22 03:01:24
科学与财富(2016年18期)2016-12-22 18:14:46
东方教育(2016年3期)2016-12-14 22:34:14
考试周刊(2016年79期)2016-10-13 23:39:31
西南交通大学学报(2016年3期)2016-06-15 20:29:35
现代工业经济和信息化(2016年4期)2016-05-17 05:35:37
